Téléchargé 53 fois


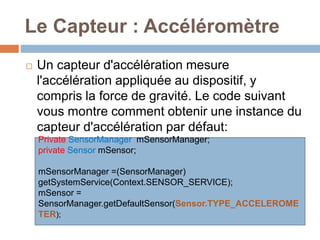
![Le Capteur : Accéléromètre
public void onSensorChanged(SensorEvent event){
// Type de capteur
if(event.sensor.getType()==Sensor.TYPE_ACCELEROMETER){
// les 3 directions
float xx=event.values[0];
float yy=event.values[1];
float zz=event.values[2];
x.setText(xx);
y.setText(yy);
z.setText(zz);
}}
La méthode «onSensorChanged» sert a retourner les
valeurs de gravité de mobile x , y et z en temps réel.](https://image.slidesharecdn.com/lescapteurssousandroid-141202093615-conversion-gate01/85/Les-capteurs-sous-android-7-320.jpg)
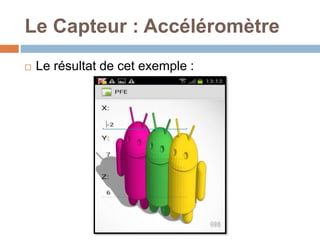
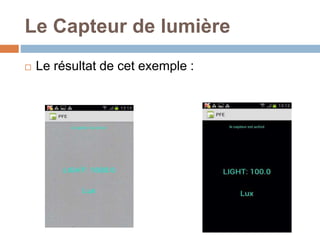
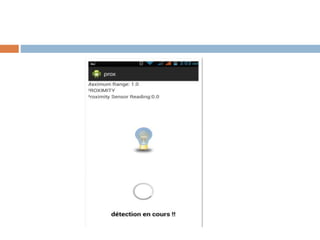
![Le Capteur de lumière
Public final void onAccuracyChanged(Sensor sensor,int
accuracy){
@Override
public final void onSensorChanged(SensorEventevent){
float lumiere_en_luxe =event.values[0];
} }
La méthode «onSensorChanged» sert a retourner la
valeur en luxe de lumière en temps réel .](https://image.slidesharecdn.com/lescapteurssousandroid-141202093615-conversion-gate01/85/Les-capteurs-sous-android-11-320.jpg)

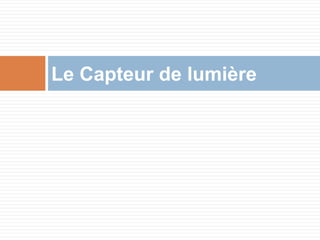
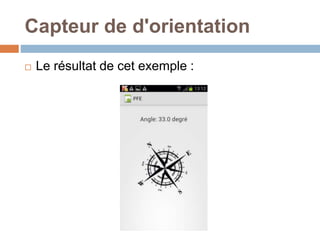
![Capteur de d'orientation
@Override
public void onSensorChanged(SensorEvent event) {
float degree = Math.round(event.values[0]);
angle.setText("Angle: " + Float.toString(degree) + " degré");
// Animation d’image selon le champs magnetique
RotateAnimation ra = new RotateAnimation( currentDegree,degree,
Animation.RELATIVE_TO_SELF, 0.5f,
Animation.RELATIVE_TO_SELF,
0.5f);
ra.setDuration(210); //durée de l”animation
ra.setFillAfter(true); // l'animation après la fin de l'état de réservation
// début de l”animation
image.startAnimation(ra);
currentDegree = -degree;
La méthode «onSensorChanged» sert a tourner l’image de boussole
et indique la direction de Nord en temps réel .](https://image.slidesharecdn.com/lescapteurssousandroid-141202093615-conversion-gate01/85/Les-capteurs-sous-android-15-320.jpg)

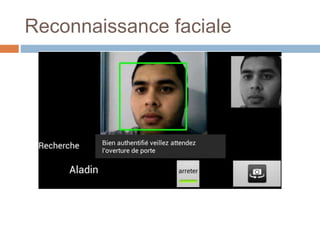

Le document présente une application Android illustrant l'utilisation de trois types de capteurs : l'accéléromètre, le capteur de lumière et le capteur d'orientation. Chaque section inclut des exemples de code pour récupérer les valeurs des capteurs en temps réel. L'application montre comment gérer les changements de valeurs à l'aide de méthodes appropriées pour chaque type de capteur.













































