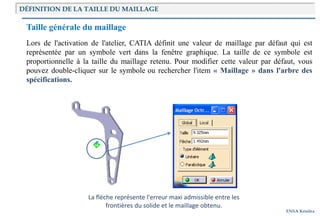
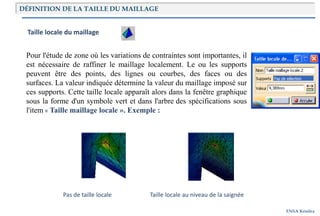
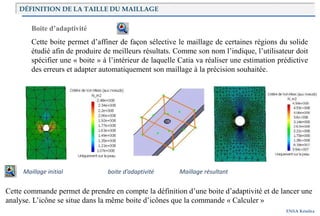
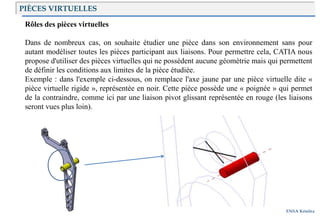
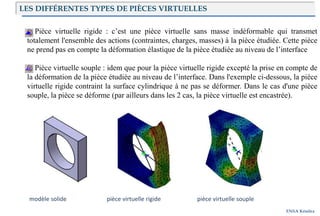
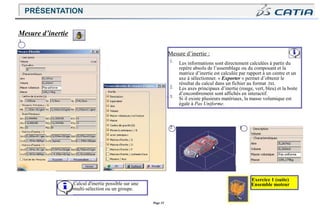
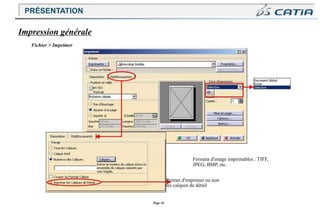
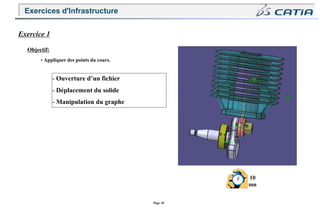
Le document présente le logiciel CATIA, utilisé pour la conception assistée par ordinateur dans divers domaines tels que l'électronique, l'aérospatial et l'automobile. Il détaille les méthodes de démarrage d'une session, les fonctionnalités de conception, ainsi que la gestion des fichiers et des barres d'outils. De plus, il aborde des aspects techniques tels que la création de repères, les mesures et les impressions dans le cadre de la modélisation 3D.











![ENSA Kénitra
Infrastructure
Conception Mécanique [Mechanical]
Modélisation volumique de pièces mécaniques et d’assemblages, tolérancement, tôlerie etc. C’est le
module par lequel on commence le travail de modélisation d’une pièce.
Forme [Shape Design & Styling]
Modélisation surfacique avancée : travail de design sur des formes extérieures d’un carter, carénage,
traitement d’un nuage de points issus d’une numérisation 3D
Analyse & Simulation [Analysis]
Maillage – Calculs de structure – Analyses modales
Construction d’usine [Plant]
Maillage – Calculs de structure – Analyses modales
Fabrication par CN [NC Manufacturing]
Génération automatique d’un programme pour machines à commande numérique
Maquette numérique [Digital Mock-Up : DMU]
Equipements & Systèmes [Equipment & Systems Engineering]
Equipements & Systèmes [Equipment & Systems Engineering]
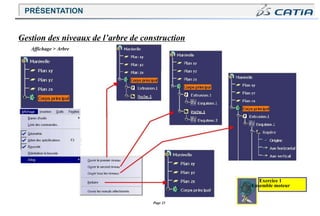
Organisation des modules
Catia V5 est organisé en modules appelés ici « Ateliers ». Ils sont structurés dans l’arbre des ateliers suivants :
Organisation des modules](https://image.slidesharecdn.com/catia-240602002851-7047e954/85/Catia-conception_mecanique_des_piecespptx-45-320.jpg)