






































Ce document présente un mémoire de master centré sur un projet artistique intitulé « perception », qui intègre la technologie de la réalité virtuelle pour créer une horloge en relief interactive. Le projet explore les illusions de la perception visuelle et permet aux utilisateurs de manipuler une horloge en relief à l'aide d'un gant de données, créant ainsi une expérience immersive en temps réel. La recherche couvre également des concepts fondamentaux comme la stéréoscopie et l'interaction entre l'art et la technologie.
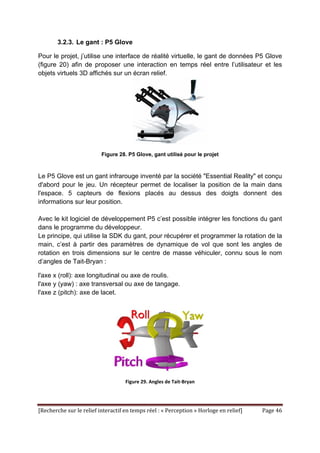
![Cours intro à la Réalité Virtuelle [2007]](https://cdn.slidesharecdn.com/ss_thumbnails/coursintroalarv5-170912130016-thumbnail.jpg?width=640&height=640&fit=bounds)




![Trabajo tecno [autoguardado]](https://cdn.slidesharecdn.com/ss_thumbnails/trabajotecnoautoguardado-110331100532-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)



















