






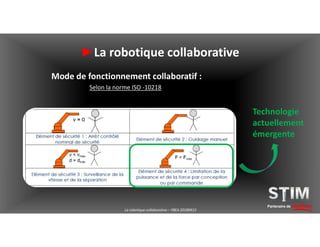


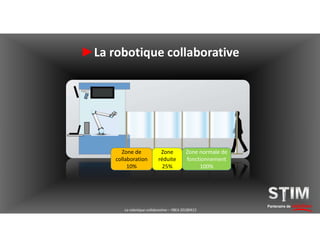

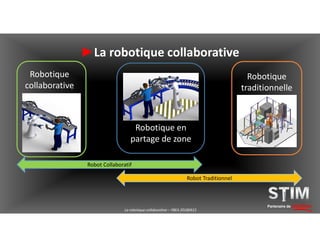






Le document présente une conférence sur la robotique collaborative et l'industrie 4.0, organisée par Stim, une entreprise fondée en 2009 avec plus de 225 employés et plusieurs sites en Amérique du Nord. Il aborde le portrait actuel de la robotique, les types de cellules robotiques, les technologies émergentes et la définition du besoin pour la mise en œuvre de solutions robotiques. Le contenu inclut également des conseils sur l'analyse de risque, la collaboration entre robots et humains, ainsi que la nécessité d'une communication efficace pour le succès des projets robotiques.



























