Télécharger pour lire hors ligne


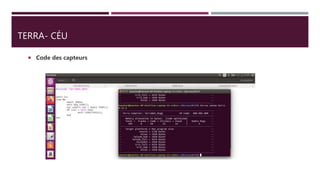


TinyOS est un système d'exploitation conçu spécifiquement pour les réseaux de capteurs embarqués, répondant aux contraintes de ressources limitées des 'motes'. Il utilise un modèle orienté événements avec une allocation statique de la mémoire et propose une programmation modulaire via le langage NESC. Grâce à sa structure innovante, TinyOS permet de développer des applications efficaces en termes de calcul et de consommation d'énergie tout en assurant une communication essentielle et des capacités en temps réel.