Télécharger pour lire hors ligne










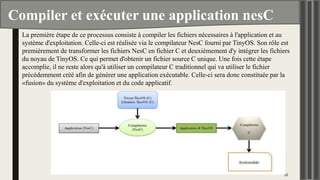


TinyOS est un système d'exploitation spécialisé pour les réseaux de capteurs sans fil, conçu pour minimiser la consommation d'énergie et respecter les contraintes de mémoire. Il utilise un langage de programmation nommé nesC, optimisé pour des ressources limitées, et ne gère pas la préemption entre les tâches, favorisant les interruptions matérielles. Ce document décrit ses propriétés, la gestion des processus et de la mémoire, ainsi que des exemples d'applications comme le programme blink.












































![Chapitre 2Chapitre 2Chapitre 2Chapitre 2Chapitre 2 [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/chapitre2autosaved-260119125211-523b598f-thumbnail.jpg?width=640&height=640&fit=bounds)
















