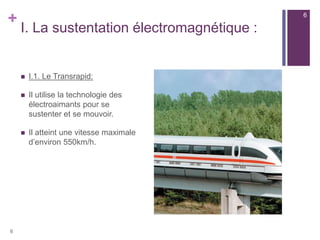
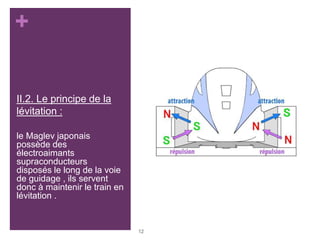
Le document traite des trains à sustentation magnétique, notamment le maglev japonais et le transrapid allemand, qui permettent d'atteindre des vitesses élevées grâce à l'absence de frottements entre les roues et les rails. Il décrit les principes de la sustentation électromagnétique et électrodynamique, ainsi que les techniques de propulsion utilisées. Bien que ces trains présentent des nombreux avantages, tels que de meilleures accélérations et un meilleur rendement énergétique, ils comportent aussi des inconvénients, incluant des coûts de construction élevés et une incompatibilité avec les réseaux traditionnels.