Le document intitulé "l'évangile de jésus-christ par la physique" associe des notions de physique à des enseignements religieux, visant à instruire les élèves de terminale scientifique tout en leur parlant de la foi chrétienne. Destiné non seulement aux élèves mais aussi aux enseignants et passionnés de physique, il vise à être un complément aux cours traditionnels et encourage la réflexion sur la spiritualité à travers la science. Les chapitres sont structurés autour de divers thèmes physiques, avec des versets bibliques en introduction, afin d'illustrer la connexion entre la science et la foi.











![CHAPITRE 1. GRANDEURS PHYSIQUES 8
Tableau 1.3 – Sous-multiples des unités.
Préfixe Symbole Facteur de multiplication
déci d 10−1
centi c 10−2
milli m 10−3
micro µ 10−6
nano n 10−9
pico p 10−12
femto f 10−15
atto a 10−18
On a par exemple :
1 cm = 10−2
m ; 2 ms = 2 × 10−3
s ; 5 TK = 5 × 1012
K
1.3.3 Equations aux dimensions
On appelle équation aux dimensions l’équation qui lie la dimension d’une grandeur dé-
rivée G aux sept dimensions fondamentales. La dimension d’une grandeur G est notée [G] ou
dim G. La forme générale d’une équation aux dimensions est la suivante :
[G] = La
.Mb
.Tc
.Id
.Θe
.Nf
.Jg
(1.22)
Il ne faudrait en aucun cas confondre la dimension d’une grandeur et son unité. L’unité dans le
système MKSA d’une grandeur s’exprime en remplaçant dans l’expression de sa dimension les
symboles des grandeurs fondamentales par leurs unités SI. L’unité de la grandeur G précédente
dans le système MKSA est donc ma
.kgb
.sc
.Ad
.Ke
.molf
.Cdg
. Les paramètres a, b, c, d, e, f et g
sont des nombres réels appelés exposants dimensionnels. Ils peuvent être positifs, négatifs
ou nuls. Une grandeur dont tous les exposants dimensionnels sont nuls est sans dimension.
Sa dimension est égale à 1. Tout nombre réel est sans dimension. La plupart des grandeurs sans
dimension n’ont pas d’unité. Cependant, les angles qui sont sans dimension ont une unité qui
est le radian (rad). L’équation aux dimensions d’une grandeur dérivée se détermine à partir
de la relation qui la lie à d’autres grandeurs dont les dimensions sont connues. Il faut noter que
dans une relation, deux grandeurs ne peuvent être additionnées ou soustraites que si elles ont
la même dimension. Soient deux grandeurs A et B, et soit a un nombre réel sans dimension.
Les dimensions respectives [A] et [B] de ces grandeurs vérifient les propriétés ci-après :
[A] = [B] ⇐⇒ [A + B] = [A − B] = [A] = [B] (1.23)
[AB] = [A] [B] (1.24)
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-19-320.jpg)
![CHAPITRE 1. GRANDEURS PHYSIQUES 9
•
A
B
˜
=
[A]
[B]
(1.25)
[aA] = [A] (1.26)
[Aa
] = [A]a
(1.27)
Il est important de préciser que l’argument des fonctions trigonométriques, logarithmiques et
exponentielles doit être sans dimension.
1.3.4 Analyse dimensionnelle d’une grandeur
L’analyse dimensionnelle permet de vérifier l’homogénéité d’une expression, c’est-à-dire
de vérifier que les deux membres de cette expression ont la même dimension. Une expression
dont les deux membres ont la même dimension est donc homogène. Toute expression non
homogène est nécessairement fausse. L’analyse dimensionnelle peut permettre dans certains
cas de déterminer la forme d’une équation en adoptant des hypothèses quant aux grandeurs
qui y entrent en jeu. Considérons une grandeur G dont on pense qu’elle dépend de n grandeurs
G1, G2, · · · et Gn selon l’expression ci-dessous, où α1, α2, · · · et αn sont des réels, et C une
constante sans dimension :
G = CG1
α1
G2
α2
· · · Gn
αn
Si l’on connait les dimensions de toutes ces grandeurs, il est possible de déterminer les valeurs
des réels α1, α2, · · · et αn :
[G] = [G1]α1
[G2]α2
· · · [Gn]αn
Par contre, il n’est pas possible de conaître la valeur de la constate C, car l’analyse dimension-
nelle ne prend pas en compte les nombres sans dimension.
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-20-320.jpg)

![CHAPITRE 1. GRANDEURS PHYSIQUES 11
3- Le volume V d’une sphère de rayon R = 6, 75 ± 0, 05 cm est donné par la relation :
V =
4
3
πR3
4- Une boule supposée ponctuelle placée à une altitude h = 1, 25 ± 0, 01 m du sol est lancée
vers le haut avec une vitesse verticale de module V = 5, 6 ± 0, 2 m.s−1
. L’intensité du champ de
pesanteur dans la région vaut g = 9, 7 ± 0, 3 m.s−2
. La résitance de l’air étant négligée, l’altitude
maximale H dont s’élève la boule par rapport au sol est donnée par la relation :
H =
V2
2g
+ h
5- Au point A d’un plan horizontal de longueur L = AB = 80 ± 1 cm, on communique une vi-
tesse horizontale VA = 3, 5 ± 0, 1 m.s−1
à une boule supposée ponctuelle de masse m = 600 ± 4 g.
Les forces s’opposant au mouvement de la boule sont équivalentes à une unique force de mo-
dule f = 1, 20 ± 0, 01 N. La vitesse VB avec laquelle la boule arrive au point B est donnée par
la relation :
VB =
É
VA
2
−
2fL
m
Exercice 1.3 :
1- La charge électrique q est liée au courant électrique i selon la relation :
i =
dq
dt
L’Unité SI de la charge électrique est le Coulomb (C). Déterminer la dimension [q] de la charge
électrique, ainsi que l’équivalent du Coulomb dans le système MKSA.
2- L’unité SI de l’énergie est le Joule (J). En se servant de la définition de l’énergie cinétique,
déterminer la dimension [E] de l’énergie, ainsi que l’équivalent du Joule dans le système MKSA.
3- L’unité SI de la force est le Newton (N). Le travail d’une force est une forme d’énergie. En
se servant de la définition du travail d’une force, déterminer la dimension [F] de la force, ainsi
que l’équivalent du Newton dans le système MKSA.
4- L’unité SI de l’intensité du champ magnétique est le Tesla (T). L’intensité F de la force
magnétique appliquée à une particule de charge électrique q animée d’une vitesse de module V
et plongée dans un champ magnétique d’intensité B est donnée par :
F = qVB
Déterminer la dimension [B] de l’intensité du champ magnétique, ainsi que l’équivalent du Tesla
dans le système MKSA.
5- L’unité SI de la tension électrique est le Volt (V). On considère une bobine constituée de
N (N ∈ N∗
) spires de surface S. Un champ magnétique perpendiculaire aux plans des spires et
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-22-320.jpg)
![CHAPITRE 1. GRANDEURS PHYSIQUES 12
de module variable B (t) est appliqué au centre de la bobine. Il se crée une f.é.m. (qui est une
tension) d’auto-induction e(t) dont l’expression est donnée par :
e(t) = −NS
dB
dt
Déterminer la dimension [U] de la tension électrique, ainsi que l’équivalent du Volt dans le
système MKSA.
Exercice 1.4 :
Les relations courant-tension d’une bobine d’inductance L et d’un condensateur de capacité C
sont respectivement données par les expressions ci-dessous :
uL = L
diL
dt
et iC = C
duC
dt
Pour chacun des cas suivants, déterminer les dimensions de toutes les grandeurs intervenant
dans la relation mathématique mentionnée puis vérifier l’homogénéité de cette relation.
1- La constante de temps (homogène à un temps) τRL d’un circuit RL constitué par un résistor
de résistance R et une bobine d’inductance L est donnée par la relation :
τRL =
L
R
2- La constante de temps (homogène à un temps) τRC d’un circuit RC constitué par un résistor
de résistance R et un condensateur de capacité C est donnée par la relation :
τRC = RC
3- Le facteur de qualité Q (grandeur sans dimension) d’un circuit RLC série constitué par un
résistor de résistance R, une bobine d’inductance L et un condensateur de capacité C est donné
par la relation :
Q =
1
R
É
L
C
4- La fréquence (inverse d’un temps) Nr à la résonance d’intensité dans un circuit RLC série
constitué par un résistor de résistance R, une bobine d’inductance L et un condensateur de
capacité C est donnée par la relation :
Nr =
1
2π
√
LC
5- L’énergie électromagnétique E emmagasinée dans un circuit comportant une bobine d’in-
ductance L et un condensateur de capacité C est donnée par la relation :
E =
1
2
LiL
2
+ CuC
2
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-23-320.jpg)











![CHAPITRE 1. GRANDEURS PHYSIQUES 24
4- La valeur numérique H de H est donnée par :
H =
V
2
2g
+ h
Application numérique :
H =
5, 62
2 × 9, 7
+ 1, 25
Soit :
H = 2, 86 m
L’incertitude-type u (H) sur H est donnée par :
u (H) =
Ê
u
V2
2g
‹2
+ u (h)2
=
s
1
4g2
u (V2)2
+
V
4
16g4
u (2g)2
+ u (h)2
=
s
1
4g2
2Vu (V)
2
+
V
4
16g4
[2u (g)]2
+ u (h)2
=
s
V
2
g2
u (V)2
+
V
4
4g4
u (g)2
+ u (h)2
=
s
V
2
g2
(∆V)2
k2
+
V
4
4g4
(∆g)2
k2
+
(∆h)2
k2
D’où :
u (H) =
1
k
s
V
2
g2
(∆V)2
+
V
4
4g4
(∆g)2
+ (∆h)2
Application numérique :
u (H) =
1
2
×
Ê
5, 6 × 0, 2
9, 7
‹2
+
1
4
×
5, 6
9, 7
‹4
× 0, 32 + 0, 012
Soit :
u (H) = 0, 063 m
L’incertitude élargie ∆H sur H est donnée par :
∆H = ku (H)
Application numérique :
∆H = 2 × 0, 063
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-35-320.jpg)


![CHAPITRE 1. GRANDEURS PHYSIQUES 27
Soit :
∆VB
VB
= 0, 0387 ≡ 3, 87 %
Finalement, le résultat de VB s’écrit :
VB = 3, 0 ± 0, 2 m.s−1
Exercice 1.3 :
1- On a :
[i] =
[dq]
[dt]
=⇒ [q] = [dq] = [i] [dt]
= [i] [t]
D’où :
[q] = T.I
L’équivalent du Coulomb dans le système MKSA est donc l’Ampère-Seconde (A.s).
2- L’énergie cinétique Ec d’un solide de masse m animé d’une vitesse V s’exprime par :
Ec =
1
2
mV2
On a donc :
[E] = [Ec]
= [m] [V]2
Or, on sait que la vitesse est le quotient d’une distance (homogène à une longueur) et d’un
temps. Soit :
[V] = L.T−1
D’où :
[E] = L2
.M.T−2
L’équivalent du Joule dans le système MKSA est donc le m2
.kg.s−2
.
3- Le travail W d’une force
−
→
F est le produit scalaire de cette force par le vecteur déplacement
−
→
d . Soient F et d les normes respectives de
−
→
F et
−
→
d . Soit θ l’angle entre
−
→
F et
−
→
d . On a :
W =
−
→
F ·
−
→
d
= Fd cos θ
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-38-320.jpg)
![CHAPITRE 1. GRANDEURS PHYSIQUES 28
On a ainsi :
[W] = [E] = [F] [d] [cos θ]
= [F] [d]
=⇒ [F] =
E
[d]
Or, le déplacement d a la dimension d’une longueur. On a ainsi :
=⇒ [F] =
L2
.M.T−2
L
D’où :
[F] = L.M.T−2
L’équivalent du Newton dans le système MKSA est donc le m.kg.s−2
.
4- On a :
B =
F
qV
=⇒ [B] =
[F]
[qV]
=
[F]
[q] [V]
=
L.M.T−2
I.T.L.T−1
D’où :
[B] = M.T−2
.I−1
L’équivalent du Tesla dans le système MKSA est donc le kg.s−2
.A−1
.
5- On a :
[U] = [e] =
[S] [dB]
[dt]
=
[S] [B]
[t]
=
L2
.M.T−2
.I−1
T
D’où :
[U] = L2
.M.T−3
.I−1
L’équivalent du Volt dans le système MKSA est donc le m2
.kg.s−3
.A−1
.
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-39-320.jpg)
![CHAPITRE 1. GRANDEURS PHYSIQUES 29
Exercice 1.4 :
1- La constante de temps τRL étant homogène à un temps, sa dimension vaut :
[τRL] = T
Pour que la relation courant-tension de la bobine soit homogène, on doit avoir :
[uL] =
[L] [diL]
[dt]
=⇒ [L] =
[uL] [dt]
[diL]
On a :
[diL] = [iL] = I ; [dt] = [t] = T
A l’exercice précédent, nous avons obtenu la dimension de la tension électrique. On a ainsi :
[uL] = L2
.M.T−3
.I−1
On a donc :
[L] =
L2
.M.T−3
.I−1
.T
I
D’où :
[L] = L2
.M.T−2
.I−2
On sait que la loi d’Ohm aux bornes d’un résistor de résistance R s’écrit :
uR = RiR
=⇒ R =
uR
iR
=⇒ [R] =
[uR]
[iR]
=
L2
.M.T−3
.I−1
I
D’où :
[R] = L2
.M.T−3
.I−2
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-40-320.jpg)
![CHAPITRE 1. GRANDEURS PHYSIQUES 30
On a ainsi :
•
L
R
˜
=
[L]
[R]
=
L2
.M.T−2
.I−2
L2.M.T−3.I−2
= T
On a donc :
[τRL] =
•
L
R
˜
La relation est donc homogène.
2- La constante de temps τRC étant homogène à un temps, sa dimension vaut :
[τRC] = T
Comme précédemment, on a :
[R] = L2
.M.T−3
.I−2
Pour que la relation courant-tension du condensateur soit homogène, on doit avoir :
[iC] =
[C] [duC]
[dt]
=⇒ [C] =
[iC] [dt]
[duC]
=
I.T
L2.M.T−3.I−1
D’où :
[C] = L−2
.M−1
.T4
.I2
On a ainsi :
[RC] = [R] [C]
= L2
.M.T−3
.I−2
.L−2
.M−1
.T4
.I2
= T
On a donc :
[τRC] = [RC]
La relation est donc homogène.
3- Le facteur de qualité Q étant une grandeur sans dimension, sa dimension est égale à 1 :
[Q] = 1
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-41-320.jpg)
![CHAPITRE 1. GRANDEURS PHYSIQUES 31
Comme précédemment, on a :
[R] = L2
.M.T−3
.I−2
[L] = L2
.M.T−2
.I−2
[C] = L−2
.M−1
.T4
.I2
On a ainsi :
–
1
R
É
L
C
™
=
È
L
C
R
=
L
C
1
2
R
#
=
[L]
1
2
[R] [C]
1
2
=
L.M
1
2 .T−1
.I−1
L2.M.T−3.I−2.L−1.M− 1
2 .T2.I
=
L.M
1
2 .T−1
.I−1
L.M
1
2 .T−1.I−1
= 1
On a donc :
[Q] =
–
1
R
É
L
C
™
La relation est donc homogène.
4- La fréquence Nr étant homogène à l’inverse d’un temps, sa dimension vaut :
[Nr] = T−1
Comme précédemment, on a :
[L] = L2
.M.T−2
.I−2
[C] = L−2
.M−1
.T4
.I2
On a ainsi :
•
1
2π
√
LC
˜
=
1
”√
LC
—
= [L]− 1
2 [C]− 1
2
= L−1
.M− 1
2 .T.I.L.M
1
2 .T−2
.I−1
= T−1
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-42-320.jpg)
![CHAPITRE 1. GRANDEURS PHYSIQUES 32
On a donc :
[Nr] =
•
1
2π
√
LC
˜
La relation est donc homogène.
5- On a déterminé à l’exercice précédent la dimension de l’énergie. La dimension de l’énergie
électromagnétique E vaut donc :
[E] = L2
.M.T−2
On a de même :
[iL] = I
[uC] = L2
.M.T−3
.I−1
[L] = L2
.M.T−2
.I−2
[C] = L−2
.M−1
.T4
.I2
On a ainsi :
•
1
2
LiL
2
˜
= [L] [iL]2
= L2
.M.T−2
.I−2
.I2
= L2
.M.T−2
•
1
2
CuC
2
˜
= [C] [uC]2
= L−2
.M−1
.T4
.I2
.L4
.M2
.T−6
.I−2
= L2
.M.T−2
On a donc :
[E] =
•
1
2
LiL
2
˜
=
•
1
2
CuC
2
˜
Soit donc :
[E] =
•
1
2
LiL
2
+
1
2
CuC
2
˜
La relation est donc homogène.
Exercice 1.5 :
1- Pour que la relation soit homogène, on doit avoir :
[V] = [m]a
[g]b
[h]c
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-43-320.jpg)
![CHAPITRE 1. GRANDEURS PHYSIQUES 33
On sait que :
[V] = L.T−1
; [m] = M ; [h] = L
Le module du poids d’un corps qui est une force est le produit de la masse m de ce corps et de
l’accélération de la pesanteur g. On a donc :
[F] = [m] [g]
=⇒ [g] =
[F]
[m]
=
L.M.T−2
M
= L.T−2
On a ainsi :
L.T−1
= Ma
.Lb
.T−2b
.Lc
= Lb+c
.Ma
.T−2b
Par identification, on a donc :
b + c = 1
a = 0
−2b = −1
=⇒
a = 0
b = 1
2
c = 1
2
On a donc :
V = Cg
1
2 h
1
2
D’où :
V = C
p
gh
2- Pour que la relation soit homogène, on doit avoir :
[T] = [m]a
[V]b
[`]c
On sait que :
[m] = M ; [V] = L.T−1
; [`] = L
La tension du fil ayant la dimension d’une force, on a :
[T] = L.M.T−2
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-44-320.jpg)
![CHAPITRE 1. GRANDEURS PHYSIQUES 34
On a ainsi :
L.M.T−2
= Ma
.Lb
.T−b
.Lc
= Lb+c
.Ma
.T−b
Par identification, on a donc :
b + c = 1
a = 1
−b = −2
=⇒
a = 1
b = 2
c = −1
On a donc :
T = CmV2
`−1
D’où :
T =
CmV2
`
3- Pour que la relation soit homogène, on doit avoir :
[T] = [m]a
[g]b
[`]c
On sait que :
[T] = T ; [m] = M ; [g] = L.T−2
; [`] = L
On a ainsi :
T = Ma
.Lb
.T−2b
.Lc
= Lb+c
.Ma
.T−2b
Par identification, on a donc :
b + c = 0
a = 0
−2b = 1
=⇒
a = 0
b = − 1
2
c = 1
2
On a donc :
T = Cg− 1
2 `
1
2
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-45-320.jpg)
![CHAPITRE 1. GRANDEURS PHYSIQUES 35
D’où :
T = C
Ê
`
g
4- Pour que la relation soit homogène, on doit avoir :
[∆`] = [m]a
[V]b
[k]c
On sait que :
[∆`] = L ; [m] = M ; [V] = L.T−1
On sait que la force de rappel F d’un ressort est le produit de sa raideur k et de la variation
de longueur ∆` :
F = k∆`
On a donc :
[F] = [k] [∆`]
=⇒ [k] =
[F]
[∆`]
=
L.M.T−2
L
= M.T−2
On a ainsi :
L = Ma
.Lb
.T−b
.Mc
.T−2c
= Lb
.Ma+c
.T−b−2c
Par identification, on a donc :
b = 1
a + c = 0
−b − 2c = 0
=⇒
a = 1
2
b = 1
c = − 1
2
On a donc :
∆` = Cm
1
2 Vk− 1
2
D’où :
∆` = CV
É
m
k
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-46-320.jpg)
![CHAPITRE 1. GRANDEURS PHYSIQUES 36
5- Pour que la relation soit homogène, on doit avoir :
[F] = [m]a
[q]b
[U]c
[D]d
On sait que :
[F] = L.M.T−2
; [m] = M ; [D] = L
Des exercices précédents, on a trouvé :
[q] = T.I ; [U] = L2
.M.T−3
.I−1
On a ainsi :
L.M.T−2
= Ma
.Tb
.Ib
.L2c
.Mc
.T−3c
.I−c
.Ld
= L2c+d
.Ma+c
.Tb−3c
.Ib−c
Par identification, on a donc :
2c + d = 1
a + c = 1
b − 3c = −2
b − c = 0
=⇒
c = b
2b + d = 1
a + b = 1
b − 3b = −2
=⇒
a = 0
b = 1
c = 1
d = −1
On a donc :
F = CqUD−1
D’où :
F =
CqU
D
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-47-320.jpg)


![CHAPITRE 1. GRANDEURS PHYSIQUES 39
D’où :
∆G =
Î
1
µ2
−λ
2
”
β
2
(∆α)2
+ α2
(∆β)2
+ 4γ2
(∆γ)2
—
+
(α β+γ2
)
2
µ2
−λ
2
3
”
µ2
(∆µ)2
+ λ
2
(∆λ)2
—
Application numérique :
∆G =
Í
1
102−82 ×
”
(3 × 0, 01)2
+ (2 × 0, 01)2
+ (2 × 6 × 0, 01)2
—
+
(2×3+62
)
(102−82)
3 ×
”
(10 × 0, 01)2
+ (8 × 0, 01)2
—
Soit :
∆G = 0, 0325 USI
Le résultat de G s’écrit donc :
G = 7, 00 ± 0, 04 USI
C’est donc la proposition b qui est correcte. Par conséquent, c’est l’élève Paul qui a raison.
Evaluation 1.3 :
De l’expression de la force F du vent, on tire l’expression de la constante aérodynamique A :
A =
2F
ρDV2
On a ainsi :
[A] =
[2F]
[ρDV2]
=
[F]
[ρ] [D] [V]2
On sait que :
[F] = L.M.T−2
; [D] = L ; [V] = L.T−1
La masse volumique ρ étant égale au quotient d’une masse sur un volume (le cube d’une
longueur), on a :
[ρ] = L−3
.M
On a donc :
[A] =
L.M.T−2
L−3.M.L.L2.T−2
=
L.M.T−2
M.T−2
= L
La constante aérodynamique A a donc la dimension d’un longueur, et son unité SI est donc le
mètre (m). L’erreur qui a été commise dans le livre est donc d’avoir écrit m2
au lieu
de m.
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-50-320.jpg)













![CHAPITRE 2. FORCES ET CHAMPS 53
Exercices
On prendra partout où le besoin se présentera l’intensité de la pesanteur g = 9, 8 m.s−2
.
Exercice 2.1 :
A la Figure 2.18 ci-dessous, une bille de masse mA = 200 g est placée au point A sur le sol
horizontal. Une autre bille de masse mB = 450 g est posée sur le sommet B d’une pyramide de
hauteur h = OB = 1, 2 m et dont les faces BC et BD font l’angle α = 45° avec l’horizontale.
Les deux billes seront considérées comme étant pontuelles. On donne d = AC = 40 cm.
Figure 2.18 – Exercice 2.1.
1- Déterminer la distance D = AB qui sépare les deux billes.
2- Représenter les forces gravitationnelles qui s’exerçent entre les deux billes et donner leurs
caractéristiques.
3- Représenter les vecteurs champs gravitationnels −
−
−
→
gA/B créé en B par la bille située en A et
−
−
−
→
gB/A créé en A par la bille située en B puis donner leurs caractéristiques.
4- Représenter les vecteurs champs gravitationnels −
−
−
→
gA/I et −
−
→
gB/I créés au milieu I du segment
[AB] par les deux billes et donner leurs caractéristiques. En déduire les caractéristiques du
champ −
→
gI résultant en I.
5- Soit M le point du segment [AB] où les champs gravitationnels créés par les deux billes se
compensent. Déterminer les distances dA = AM et dB = BM.
Exercice 2.2 :
A la Figure 2.19, une boule sphérique de masse m1 = 2, 7 kg et de rayon r1 = 8 cm repose en
équilibre sur un poteau en forme de pavé, de hauteur h1 = A1B1 = C1D1 = 1, 3 m et de largeur
A1D1 = B1C1 = 2r1. Une autre boule de masse m2 = 1, 2 kg et de rayon r2 = 4 cm est placée
sur un poteau de hauteur h2 = A2B2 = C2D2 = 74 cm et de largeur A2D2 = B2C2 = 2r2. On
donne d = B1C2 = 92 cm.
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-64-320.jpg)
![CHAPITRE 2. FORCES ET CHAMPS 54
Figure 2.19 – Exercice 2.2.
1- Déterminer la distance D = O1O2 qui sépare les centres de gravité des deux boules.
2- Représenter les forces de gravitation s’exerçant entre les deux boules et donner leurs carac-
téristiques.
3- Représenter les champs de gravitation créés respectivement par chaque boule, sur le centre
de l’autre boule puis donner leurs caractéristiques.
4- Déterminer les distances d1 et d2 respectivement par rapport à O1 et O2 du point M du
segment [O1O2] où les champs gravitationnels créés par les deux boules se compensent.
Exercice 2.3 :
Lors d’une éclipse, les centres de gravité respectifs S, L et T du Soleil, de la Lune et de la
Terre sont alignés comme à la Figure 2.20 ci-dessous. On donne les masses de ces astres :
MS = 1, 989 × 1030
kg, ML = 7, 342 × 1022
kg et MT = 5, 972 × 1024
kg. Les distances Soleil-
Terre et Lune-Terre valent respectivement ST = 149 598 023 km et LT = 383 398 km.
Figure 2.20 – Exercice 2.3.
1- Représenter les forces gravitationnelles que le soleil et la Terre exercent sur la Lune et donner
leurs caractéristiques.
2- En déduire les caractéristiques de la force résultante subie par la Lune.
3- Représenter les champs gravitationnels que le soleil et la Terre créent au centre de gravité
de la Lune et donner leurs caractéristiques.
4- En déduire les caractéristiques du champ résultant créé au centre de gravité de la Lune.
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-65-320.jpg)


![CHAPITRE 2. FORCES ET CHAMPS 57
4.1- Expliquer pourquoi M ne peut pas se trouver sur le segment [C1C2].
4.2- On suppose que M se trouve sur la droite (C1C2), à gauche de C1. Montrer, en tentant de
calculer d1 que cette position de M n’est pas possible.
4.3- Le point M ne peut donc se situer qu’à droite de C2. Calculer alors les distances d1 et d2.
Exercice 2.7 :
Dans un repère orthonormé
€
O ; −
→
ı ; −
→
;
−
→
k
Š
illustré à la Figure 2.23 ci-dessous, deux parti-
cules ponctuelles de charges respectives qA = −1, 5 µC et qB = −6 µC sont placées aux points
A et B de coordonnées respectives (xA = 1 ; yA = 2 ; zA = 3) et (xB = 3 ; yB = 4 ; zB = 4). On
note −
−
→
uAB le vecteur unitaire de même direction que la droite (AB) et orienté de A vers B.
L’unité est le mètre (m).
Figure 2.23 – Exercice 2.7.
1- Déterminer l’expression du vecteur
−
−
→
AB en fonction des vecteurs de base. En déduire la
distance D qui sépare les deux particules, puis l’expression du vecteur −
−
→
uAB .
2- Exprimer les forces électrostatiques s’exerçant entre les deux particules.
3- Exprimer les champs électrostatiques créés par chaque particule sur l’autre.
4- Soit M un point de coordonnées (x ; y ; z) situé sur la droite (AB).
4.1- Déterminer une équation paramétrique de la droite (AB).
4.2- Déterminer les distances AM et BM si les champs électrostatiques créés en M se com-
pensent. En déduire les coordonnées (x ; y ; z) de M.
Exercice 2.8 :
La Figure 2.24 illustre une situation dans laquelle trois charges pontuelles qA = q, qB = −2q
et qC = 3q (avec q = 2 nC) sont placées respectivement aux sommets A, B et C d’un triangle
équilatéral de centre de gravité G et de côté a = 2
√
3 m.
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-68-320.jpg)









![CHAPITRE 2. FORCES ET CHAMPS 68
Le champ gravitationnel −
−
−
→
gA/B est donc appliqué au point B, dirigé suivant la droite
(AB), orienté de B vers A, et son module vaut −
−
−
→
gA/B = 3, 33 × 10−12
N.kg−1
.
Le champ gravitationnel −
−
−
→
gB/A quant à lui est appliqué au point A, dirigé suivant la
droite (AB), orienté de A vers B, et son module vaut −
−
−
→
gB/A = 7, 5×10−12
N.kg−1
.
4- Le milieu I du segment [AB] est situé à la même distance D
2
des billes en A et B. Soit −
→
u
un vecteur unitaire de même direction que la droite (AB) et orienté de A vers B. Les champs
−
−
−
→
gA/I et −
−
→
gB/I ont été représentés à la Figure 2.34. Ils ont pour expressions respectives :
−
−
→
gA/I = −
GmA
D
2
2
−
→
u
= −
6, 67 × 10−11
× 0, 2
2
2
2
−
→
u
= −1, 334 × 10−11 −
→
u N.kg−1
−
−
→
gB/I =
GmB
D
2
2
−
→
u
=
6, 67 × 10−11
× 0, 45
2
2
2
−
→
u
= 3 × 10−11 −
→
u N.kg−1
Le champ gravitationnel −
−
→
gA/I est donc appliqué au point I, dirigé suivant la droite
(AB), orienté de I vers A, et son module vaut −
−
→
gA/I = 1, 334 × 10−11
N.kg−1
.
Le champ gravitationnel −
−
→
gB/I quant à lui est appliqué au point I, dirigé suivant la
droite (AB), orienté de I vers B, et son module vaut −
−
→
gB/I = 3 × 10−11
N.kg−1
.
Le champ résultant −
→
gI est donné par :
−
→
gI = −
−
→
gA/I + −
−
→
gB/I
= −1, 334 × 10−11 −
→
u + 3 × 10−11 −
→
u
= 1, 66 × 10−11 −
→
u N.Kg−1
Le champ gravitationnel résultant −
→
gI est donc appliqué au point I, dirigé suivant
la droite (AB), orienté de I vers B, et son module vaut −
→
gI = 1, 66×10−11
N.kg−1
.
5- Soient −
−
−
→
gA/M et −
−
−
→
gB/M les champs créés en M respectivement par la bille en A et la bille en
B. Ces champs ont pour expressions :
−
−
−
→
gA/M = −
GmA
dA
2
−
→
u
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-79-320.jpg)
![CHAPITRE 2. FORCES ET CHAMPS 69
−
−
−
→
gB/M =
GmB
dB
2
−
→
u
=
GmB
(D − dA)2
−
→
u
Si les champs créés en M se compensent, alors la résultante en ce point est nulle. Soit :
−
−
−
→
gA/M + −
−
−
→
gB/M =
−
→
0
=⇒ −
GmA
dA
2
−
→
u +
GmB
(D − dA)2
−
→
u =
−
→
0
=⇒
mA
dA
2 =
mB
(D − dA)2
=⇒
D − dA
dA
‹2
=
mB
mA
=⇒
D − dA
dA
=
É
mB
mA
=⇒
D
dA
− 1 =
É
mB
mA
On a donc :
dA =
D
1 +
È mB
mA
Application numérique :
dA =
2
1 +
È 0,45
0,2
Soit :
dA = 80 cm
On a aussi :
dB = D − dA
Application numérique :
dB = 2 − 0, 8
Soit :
dB = 1, 2 m
Exercice 2.2 :
1- A la Figure 2.35, on a marqué le point G, projeté orthogonal de O2 sur le segment [O1F1].
Le triangle O1GO2 est rectangle en G, et on peut donc utiliser le théorème de Pythagore et
écrire :
O1O2
2
= D2
= O1G2
+ O2G2
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-80-320.jpg)
![CHAPITRE 2. FORCES ET CHAMPS 70
Figure 2.35 – Correction de l’exercice 2.2.
Soit H le projeté orthogonal de E2 sur le segment [O1F1]. On voit que :
O1F1 = O1E1 + E1F1 = O1G + GH + HF1
Or, on a :
O1E1 = r1 ; E1F1 = h1 ; GH = O2E2 = r2 et HF1 = E2F2 = h2
Soit :
r1 + h1 = O1G + r2 + h2
=⇒ O1G = h1 − h2 + r1 − r2
On a aussi :
d = B1C2 = B1F1 + F1F2 + F2C2
Or, on a :
B1F1 = r1 ; F1F2 = O2G et F2C2 = r2
Soit :
d = r1 + O2G + r2
=⇒ O2G = d − r1 − r2
On a donc :
D2
= (h1 − h2 + r1 − r2)2
+ (d − r1 − r2)2
D’où :
D =
È
(h1 − h2 + r1 − r2)2
+ (d − r1 − r2)2
Application numérique :
D =
È
(1, 3 − 0, 74 + 0, 08 − 0, 04)2
+ (0, 92 − 0, 08 − 0, 04)2
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-81-320.jpg)


![CHAPITRE 2. FORCES ET CHAMPS 73
Exercice 2.3 :
1- Les forces gravitationnelles
−
→
FS et
−
−
→
FT subies par la Lune respectivement de la part du Soleil
et de la Terre ont été représentées à la Figure 2.36 ci-dessous.
Figure 2.36 – Correction de l’exercice 2.3.
Soit −
→
u un vecteur unitaire de même direction que la droite (ST) et orienté de S vers T. La
force gravitationnelle
−
→
FS que le Soleil exerce sur la Lune a pour expression :
−
→
FS = −
GMSML
SL2
−
→
u
= −
GMSML
(ST − LT)2
−
→
u
= −
6, 67 × 10−11
× 1, 989 × 1030
× 7, 342 × 1022
[103 × (149 598 023 − 383 398)]2
−
→
u
= −4, 37 × 1020 −
→
u N
La force gravitationnelle
−
−
→
FT que la Terre exerce sur la Lune a pour expression :
−
−
→
FT =
GMTML
LT2
−
→
u
=
6, 67 × 10−11
× 5, 972 × 1024
× 7, 342 × 1022
(103 × 383 398)2
−
→
u
= 1, 98 × 1020 −
→
u N
La force
−
→
FS que le Soleil exerce sur la Lune est donc appliquée au centre de gravité
L de la Lune, dirigée suivant la droite (ST) joignant les centres de gravité du Soleil
et de la Terre, orientée de L vers S, et son module vaut
−
→
FS = 4, 37 × 1020
N.
La force
−
−
→
FT que la Terre exerce sur la Lune quant à elle est appliquée au centre
de gravité L de la Lune, dirigée suivant la droite (ST) joignant les centres de
gravité du Soleil et de la Terre, orientée de L vers T, et son module vaut
−
−
→
FT =
1, 98 × 1020
N.
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-84-320.jpg)





![CHAPITRE 2. FORCES ET CHAMPS 79
Application numérique :
gH =
6, 67 × 10−11
× 1, 898 × 1027
[(69 911 + 1000) × 103]2
Soit :
gH = 25, 17 N.kg−1
2- Puisque l’altitude du satellite diminue de 5% après chaque tour, alors, la diminution relative
de sa hauteur entre le n-ième tour et le n + 1-ième tour vaut 5%. Soit :
hn − hn+1
hn
= 5% =
5
100
=
1
20
=⇒ hn+1 − hn = −
1
20
hn
=⇒ hn+1 = hn −
1
20
hn
=
19
20
hn
(hn)n∈N est donc une suite géométrique de premier terme h0 = H = 1000 Km et de
raison q = 19
20
.
3- (hn)n∈N étant une suite géométrique, alors pour tout entier naturel n, on a :
hn = qn
h0
= qn
H
Soit :
hn = 1000
19
20
‹n
4- Après 25 tours, le satellite se trouve à l’altitude H0
donnée par :
H0
= h25 = 1000
19
20
‹25
Soit :
H0
= 277, 38 km
5- Le module du champ gravitationnel à l’altitude H0
a pour expression :
gH0 =
GMJ
(RJ + H0)2
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-90-320.jpg)
![CHAPITRE 2. FORCES ET CHAMPS 80
Application numérique :
gH0 =
6, 67 × 10−11
× 1, 898 × 1027
[(69 911 + 277, 38) × 103]2
Soit :
gH0 = 25, 69 N.kg−1
6- La variation relative du champ gravitationnel vaut :
gH0 − gH
gH
=
25, 69 − 25, 17
25, 17
= 0, 02
L’augmentation relative du champ gravitationnel entre la position de départ du
satellite et la position qu’il occupe après avoir effectué 25 tours est donc de 2%.
Exercice 2.6 :
1- A la Figure 2.38, on a marqué le projeté orthogonal A de C2 sur le segment [O1C1].
Figure 2.38 – Correction de l’exercice 2.6.
Le triangle C1AC2 est rectangle en A, et on peut écrire :
D2
= C1C2
2
= C1A2
+ C2A2
On peut remarquer que :
O1C1 = h1 +
1
2
a1 = O1A + C1A
Or :
O1A = O2C2 = h2 +
1
2
a2
Soit :
h1 +
1
2
a1 = h2 +
1
2
a2 + C1A
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-91-320.jpg)

![CHAPITRE 2. FORCES ET CHAMPS 82
Puisque le cube de centre C2 a une charge q2 négative, le champ
−
−
−
→
E2/1 qu’il crée en C1 est
centripète, et sa norme vaut :
−
−
−
→
E2/1 =
−
−
−
→
F2/1
|q1|
=
3, 6
20 × 10−6
= 1, 8 × 105
N.C−1
Le champ
−
−
−
→
E1/2 est donc appliqué au point C2, dirigé suivant la droite (C1C2),
orienté de C1 vers C2, et son module vaut
−
−
−
→
E1/2 = 7, 2 × 105
N.C−1
.
Le champ
−
−
−
→
E2/1 quant à lui est appliqué au point C1, dirigé suivant la droite (C1C2),
orienté de C1 vers C2, et son module vaut
−
−
−
→
E2/1 = 1, 8 × 105
N.C−1
.
4- 4.1- Supposons que le point M se trouve sur le segment [C1C2]. Le champ
−
−
−
→
EM1 que le cube
de centre C1 crée en M est centrifuge tandis que le champ
−
−
−
→
EM2 que le cube de centre C2 crée
en M est centripète. Les deux champs ont donc le même sens comme indiqué sur la Figure
2.39 ci-dessous. Par conséquent, ils ne peuvent pas se compenser.
Figure 2.39 – Correction de l’exercice 2.6 (Point M sur le segment [C1C2]).
On en déduit donc que le point M ne peut pas se trouver sur le segment [C1C2].
4.2- Supposons que le point M se trouve sur la droite (C1C2), à gauche de C1 comme sur la
Figure 2.40. Les champs
−
−
−
→
EM1 et
−
−
−
→
EM2 sont de sens contraires, et s’ils se compensent, alors
on devrait avoir :
K |q1|
d1
2 =
K |q2|
d2
2
=⇒
|q1|
d1
2 =
|q2|
(D + d1)2
=⇒
D + d1
d1
‹2
=
|q2|
|q1|
=⇒
D + d1
d1
=
Ê
|q2|
|q1|
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-93-320.jpg)


































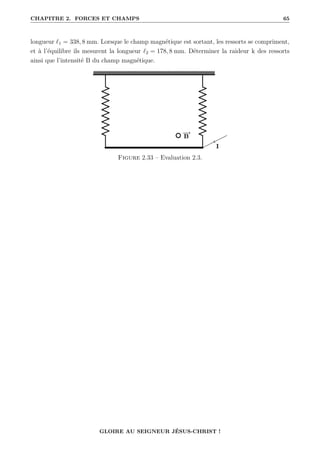
![CHAPITRE 2. FORCES ET CHAMPS 117
En soustrayant les deux équations du système, on obtient :
2k (`1 + `2 − 2`0) = 2Mg
D’où :
k =
Mg
`1 + `2 − 2`0
On a donc :
BIL = 2k (`1 − `0) − Mg
=⇒ B =
1
IL
[2k (`1 − `0) − Mg]
=
1
IL
•
2Mg (`1 − `0)
`1 + `2 − 2`0
− Mg
˜
=
1
IL
•
Mg (2`1 − 2`0)
`1 + `2 − 2`0
−
Mg (`1 + `2 − 2`0)
`1 + `2 − 2`0
˜
D’où :
B =
Mg (`1 − `2)
IL (`1 + `2 − 2`0)
Applications numériques :
k =
3 × 9, 8
10−3 × (338, 8 + 178, 8 − 2 × 200)
B =
3 × 9, 8 × 10−3
× (338, 8 − 178, 8)
5 × 2 × 10−3 × (338, 8 + 178, 8 − 2 × 200)
Donc, la raideur des deux ressorts vaut k = 250 N.m−1
, et l’intensité du champ
magnétique vaut B = 4 T.
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-128-320.jpg)



















![CHAPITRE 3. GÉNÉRALITÉS SUR LES MOUVEMENTS 138
Exercice 3.9 :
A la Figure 3.19 ci-dessous, une plaque rectangulaire mince, de masse M = 6 kg, de longueur
L = 80 cm et de largeur ` = 60 cm est mise en rotation avec une vitesse ω = 500 rad.s−1
autour
de l’axe vertical (∆) passant par son centre. On admet que les efforts résistifs s’opposant à
la rotation de la plaque sont équivalents à un moment M par rapport à (∆). A cause de ces
efforts, la plaque s’arrête de tourner au bout de 40 secondes.
Figure 3.19 – Exercice 3.9.
1- Déterminer le moment d’inertie J(∆) de la plaque par rapport à (∆).
2- Déterminer son accélération angulaire θ̈.
3- En déduire la valeur du moment M.
4- A quelle vitesse angulaire ω0
aurait-on dû mettre la plaque en rotation pour qu’elle se fût
arrêtée après une minute ?
Exercice 3.10 :
A une tige homogène AB de centre O, de masse M = 1, 2 kg et de longueur L = 80 cm, on associe
deux masselottes de masses respectives m1 = 300 g et m2 = 500 g placées respectivement en P1,
milieu de [AO], et P2, milieu de [OB], comme illustré à la Figure 3.20. On note G le centre
de masse de tout le système.
1- Démontrer qu’on a :
−
−
→
OG =
m2 − m1
4 (M + m1 + m2)
−
−
→
AB
Dire donc si G se trouve sur le segment [OP1] ou sur [OP2], puis calculer la distance OG.
2- Déterminer le moment d’inertie Jtige(∆O) de la tige seule, par rapport à l’axe horizontal (∆O)
passant par O.
3- En déduire le moment d’inertie Jtige(∆G) de la tige seule, par rapport à l’axe horizontal (∆G)
passant par G.
4- Déterminer les distances P1G et P2G.
5- En déduire le moment d’inertie J(∆G) de tout le système par rapport à (∆G).
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-149-320.jpg)

![CHAPITRE 3. GÉNÉRALITÉS SUR LES MOUVEMENTS 140
4- Déterminer le moment d’inertie Jcerceau(∆G) du cerceau seul par rapport à l’axe horizontal
(∆G) passant par G.
5- En déduire le moment d’inertie J(∆G) du système par rapport à (∆G).
On soumet le système à un moment M = 18 N.m, et il se met en rotation sans vitesse initiale
autour de (∆G).
6- Déterminer l’accélération angulaire θ̈ du système.
7- En déduire la vitesse angulaire ω acquise au bout de 30 secondes.
Exercice 3.12 :
A la Figure 3.22 ci-dessous, une boule de masse m = 500 g et de dimensions négligeables
est mise en mouvement au point O d’un plan horizontal de longueur OA = L = 80 cm avec
une vitesse initiale VO = 1, 2 m.s−1
. Arrivée en A, la boule aborde une gouttière circulaire de
centre C et de rayon r = 60 cm. On considère sur la gouttière un point M repéré par l’angle
θ = [
ACM. La boule est soumise, uniquement sur le plan horizontal à des frottements d’intensité
f = 0, 25 N.
Figure 3.22 – Exercice 3.12.
1- En utilisant le théorème de l’énergie cinétique, déterminer la vitesse VA acquise par la boule
au point A.
2- Faire le bilan des forces qui s’exerçent sur la boule au point M et les représenter.
3- Exprimer en fonction de θ la vitesse VM de la boule en M.
4- Exprimer en fonction de θ les accélérations normale an et tangentielle at de la boule en M.
5- Exprimer en fonction de θ la réaction de la gouttière sur la boule en M.
6- En déduire la valeur θ0 de l’angle θ pour laquelle la boule perd le contact avec la gouttière.
Exercice 3.13 :
On abandonne sans vitesse initiale une petite bille ponctuelle de masse m = 400 g au point A
d’un plan de longueur AB = L = 1, 2 m incliné à l’horizontale d’un angle α ∈ ] 0° ; 90° [. La
bille aborde en B une gouttière circulaire de centre O et de rayon r = 40 cm. Comme illustré à
la Figure 3.23, C et D sont respectivement le point le plus bas et le point le plus haut de la
gouttière. Les frottements seront négligés durant tout le trajet de la bille.
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-151-320.jpg)
![CHAPITRE 3. GÉNÉRALITÉS SUR LES MOUVEMENTS 141
Figure 3.23 – Exercice 3.13.
1- Déterminer en fonction de α les expressions des vitesses VB, VC et VD de la bille, respecti-
vement en B, C et D.
2- Faire le bilan des forces qui agissent sur la bille en D et les représenter.
3- Exprimer en fonction de α les accélérations normale anD et tangentielle atD de la bille, ainsi
que le module de la réaction de la gouttière en D.
4- Déterminer les angles λ ∈ ] 0° ; 90° [ et µ ∈ ] 0° ; 90° [ tels que :
cos λ =
L
√
L2 + r2
et sin µ =
3r
2
√
L2 + r2
5- En déduire la valeur minimale αmin que doit dépasser α pour que la bille atteigne le point
D sans perdre le contact avec la gouttière.
Exercice 3.14 :
A la Figure 3.24, une boule ponctuelle de masse m = 375 g et de charge électrique q = 2 µC
est suspendue à un fil inextensible, de masse négligeable et de longueur ` = 60 cm. L’autre
extrémité du fil est fixée sur un corps ponctuel immobile de charge électrique −q. On place le
fil en position horizontale, et on abandonne la boule dans cette position avec une vitesse initiale
V0. La résistance de l’air sera négligée.
1- Faire le bilan des forces extérieures qui s’exerçent sur la boule, et les représenter à l’instant
où le fil est écarté de l’horizontale d’un angle quelconque θ.
2- Déterminer l’intensité de la force électrostatique subie par la boule.
3- Déterminer l’expression en fonction de θ de la vitesse V de la boule lorsque le fil est écarté
de l’angle θ.
4- Exprimer les accélérations normale an et tangentielle at, ainsi que la tension du fil en fonction
de θ.
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-152-320.jpg)

![CHAPITRE 3. GÉNÉRALITÉS SUR LES MOUVEMENTS 143
Evaluations des compétences
On prendra partout où le besoin se présentera l’intensité de la pesanteur g = 9, 8 m.s−2
.
Evaluation 3.1 :
Un véhicule de masse totale M = 4 t roule sur une route horizontale en développant une force
motrice parallèle à la route et d’intensité F = 540 N. Après un moment, le véhicule aborde une
pente montante de côte 5%. Les frottements étant négligés durant tout le trajet, qu’elle doit
être l’intensité F0
de la force motrice parallèle à la pente que doit développer le véhicule pour
garder la même accélération ?
Evaluation 3.2 :
A la Figure 3.26 ci-dessous, on considère une tige homogène de centre O, de masse 5m et
de longueur L = AB = 1, 2 m. On fixe en ses deux extrémités A et B deux masselottes de
masses respectives m et 2m. Aux points C et D, milieux respctifs de [OA] et [OB], on fixe deux
masselottes de masses respectives 3m et 4m. On veut placer le système sur une calle, de telle
manière qu’il soit maintenu en équilibre en position horizontale.
Figure 3.26 – Evaluation 3.2.
A quelle distance d de l’extrémité A doit-on placer cette calle ?
Evaluation 3.3 :
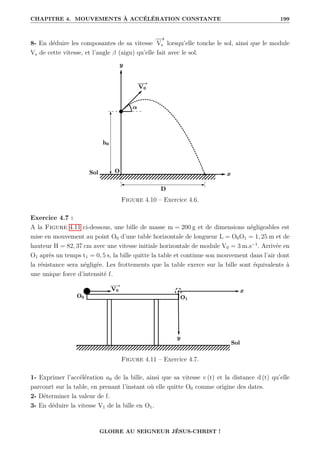
A la Figure 3.27 ci-dessous, une bille de dimensions négligeables est mise en mouvement avec
une vitesse initiale V au niveau le plus bas d’une piste circulaire de rayon r = 1 m.
Figure 3.27 – Evaluation 3.3.
Les frottements étant négligés, quelle est la valeur minimale Vmin que doit dépasser la vitesse
initiale V pour que la bille se déplace sur la piste circulaire sans jamais perdre le contact ?
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-154-320.jpg)
















![CHAPITRE 3. GÉNÉRALITÉS SUR LES MOUVEMENTS 160
D’où :
ω0
= −60θ̈
Application numérique :
ω0
= −60 × −12, 5
Soit :
ω0
= 750 rad.s−1
Exercice 3.10 :
1- Le centre de masse G du système est le barycentre des centres de masse de chaque corps
constituant le système, dont les coefficients sont égaux aux masses des corps. La tige étant
homogène, son centre de masse est en son milieu O. Les deux masselottes étant ponctuelles,
leurs centres de masses ne sont rien d’autre que les points P1 et P2 en lesquels ils se trouvent.
G est donc le barycentre des points O, P1 et P2 affectés respectivement des coefficients M, m1
et m2. On peut donc écrire :
M
−
−
→
GO + m1
−
−
−
→
GP1 + m2
−
−
−
→
GP2 =
−
→
0
=⇒ M
−
−
→
GO + m1
−
−
→
GO + m1
−
−
−
→
OP1 + m2
−
−
→
GO + m2
−
−
−
→
OP2 =
−
→
0
=⇒ (M + m1 + m2)
−
−
→
GO + m1
−
−
−
→
OP1 + m2
−
−
−
→
OP2 =
−
→
0
=⇒ (M + m1 + m2)
−
−
→
OG = m1
−
−
−
→
OP1 + m2
−
−
−
→
OP2
P1 et P2 étant les milieux respectifs de [AO] et [OB], on a :
−
−
−
→
OP1 =
1
2
−
−
→
OA = −
1
4
−
−
→
AB et
−
−
−
→
OP2 =
1
2
−
−
→
OB =
1
4
−
−
→
AB
On a alors :
(M + m1 + m2)
−
−
→
OG = −
m1
4
−
−
→
AB +
m2
4
−
−
→
AB
D’où :
−
−
→
OG =
m2 − m1
4 (M + m1 + m2)
−
−
→
AB
En remplaçant les masses par leurs valeurs, on obtient :
−
−
→
OG =
0, 5 − 0, 3
4 (1, 2 + 0, 3 + 0, 5)
−
−
→
AB
= 0, 025
−
−
→
AB
−
−
→
OG et
−
−
→
AB sont donc colinéaires de même sens.
Par conséquent, G se trouve sur le segment [OP2].
On a :
OG = 0, 025AB
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-171-320.jpg)
![CHAPITRE 3. GÉNÉRALITÉS SUR LES MOUVEMENTS 161
Or, AB = L. D’où :
OG = 0, 025L
Application numérique :
OG = 0, 025 × 80
Soit :
OG = 2 cm
2- Le moment d’inertie Jtige(∆O) de la tige seule par rapport à l’axe horizontal (∆O) passant
par O est donné par :
Jtige(∆O) =
1
12
ML2
Application numérique :
Jtige(∆O) =
1, 2 × 0, 82
12
Soit :
Jtige(∆O) = 0, 064 kg.m2
3- En utilisant le théorème d’Huyguens, le moment d’inertie Jtige(∆G) de la tige seule par rapport
à l’axe horizontal (∆G) passant par G est donné par :
Jtige(∆G) = Jtige(∆O) + MOG2
Application numérique :
Jtige(∆G) = 0, 064 + 1, 2 × 0, 022
Soit :
Jtige(∆G) = 6, 448 × 10−2
kg.m2
4- Le point G se trouvant sur le segment [OP2], on a :
P1G = OP1 + OG et OP2 = OG + P2G
Or :
OP1 = OP2 =
1
4
L
D’où :
P1G =
L
4
+ OG
P2G =
L
4
− OG
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-172-320.jpg)





![CHAPITRE 3. GÉNÉRALITÉS SUR LES MOUVEMENTS 167
de M sur le segment [AC]. Du théorème de l’énergie cinétique, on peut écrire :
1
2
m VM
2
− VA
2
= mgAN
=⇒ VM =
È
VA
2
+ 2gAN
On a :
AN = AC − CN = r − CN
Or, on a :
cos θ =
CN
CM
=
CN
r
=⇒ CN = r cos θ
Donc, on a :
AN = r − r cos θ = r (1 − cos θ)
D’où :
VM =
È
VA
2
+ 2gr (1 − cos θ)
4- On sait que l’accélération normale an de la boule en M est donnée par :
an =
VM
2
r
D’où :
an =
VA
2
+ 2gr (1 − cos θ)
r
En faisant la projection dans le repère de Frenet, le théorème du centre d’inertie peut s’écrire
de la manière ci-dessous :
−
→
P
mg cos θ
mg sin θ
+
−
→
R
−R
0
= m−
→
a
man
mat
On a donc :
mg sin θ = mat
D’où :
at = g sin θ
5- De la projection faite à la question précédente, on a :
mg cos θ − R = man
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-178-320.jpg)

![CHAPITRE 3. GÉNÉRALITÉS SUR LES MOUVEMENTS 169
D’où :
VC =
È
2g [L sin α + r (1 − cos α)]
On a également :
1
2
m VD
2
− VC
2
= −2mgr
=⇒ VD
2
= VC
2
− 4gr
= 2g [L sin α + r (1 − cos α)] − 4gr
D’où :
VD =
È
2g [L sin α − r (cos α + 1)]
2- Les forces qui agissent sur la bille au point D sont :
— Son poids
−
→
P = m−
→
g ;
— La réaction normale
−
−
→
RD de la gouttière.
Ces forces ont été représentées à la Figure 3.36 ci-dessous.
Figure 3.36 – Correction de l’exercice 3.13.
3- L’accélération normale de la bille en D est donnée par :
anD =
VD
2
r
D’où :
anD =
2g [L sin α − r (cos α + 1)]
r
Dans le repère de Frenet, le théorème du centre d’inertie en D peut s’écrire :
−
→
P
mg
0
+
−
−
→
RD
RD
0
= m−
→
aD
manD
matD
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-180-320.jpg)
![CHAPITRE 3. GÉNÉRALITÉS SUR LES MOUVEMENTS 170
On voit donc que :
atD = 0
De même, on a :
mg + RD = manD
=⇒ RD =m (anD − g)
D’où :
RD = mg
•
2 [L sin α − r (cos α + 1)]
r
− 1
˜
4- On a :
λ = cos−1
•
L
√
L2 + r2
˜
µ = sin−1
•
3r
2
√
L2 + r2
˜
En effectuant les applications numériques, on obtient :
λ = cos−1
•
1, 2
√
1, 22 + 0, 42
˜
µ = sin−1
•
3 × 0, 4
2
√
1, 22 + 0, 42
˜
Soit :
λ = 18, 43◦
µ = 28, 31◦
5- Pour que la bille atteigne le point D, la vitesse VD doit être strictement positive. Pour
qu’elle reste en contact avec la gouttière, l’intensité RD de la réaction en D doit être elle aussi
strictement positive. Si cette dernière condition est vérifiée, la première l’est aussi. Donc, la
bille atteint le point D sans perdre le contact avec la gouttière si :
RD 0
=⇒
2 [L sin α − r (cos α + 1)]
r
− 1 0
=⇒ 2 [L sin α − r (cos α + 1)] r
=⇒ L sin α − r (cos α + 1)
r
2
=⇒ L sin α − r cos α
3r
2
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-181-320.jpg)
![CHAPITRE 3. GÉNÉRALITÉS SUR LES MOUVEMENTS 171
=⇒
L
√
L2 + r2
sin α −
r
√
L2 + r2
cos α
3r
2
√
L2 + r2
=⇒ cos λ sin α − sin λ cos α sin µ
=⇒ sin (α − λ) sin µ
La fonction sinus étant croissante dans l’intervalle ] 0° ; 90° [, on a donc :
α − λ µ
D’où :
αmin = λ + µ
Application numérique :
αmin = 18, 43◦
+ 28, 31◦
Soit :
αmin = 46, 74◦
Exercice 3.14 :
1- Les forces qui s’exerçent sur la boule sont :
— Son poids
−
→
P = m−
→
g ;
— La tension
−
→
T du fil ;
— La force électrostatique
−
→
F .
Ces forces ont été représetées à la Figure 3.37 ci-dessous.
Figure 3.37 – Correction de l’exercice 3.14.
2- L’intensité de la force électrostatique subie par la boule est donnée par :
F =
Kq2
`2
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-182-320.jpg)














![CHAPITRE 4. MOUVEMENTS À ACCÉLÉRATION CONSTANTE 187
4.2.2 Mouvement d’un projectile dans un champ de pesanteur uniforme
Considérons à la Figure 4.4 ci-dessous un projectile ponctuel de masse m se trouvant
initialement à l’origine O d’un repère cartésien (O ; x ; y). Notons
−
−
→
V0 le vecteur-vitesse initiale
de ce projectile en O, qui fait avec l’horizontale un angle de tir α ∈ ] 0° ; 90° [. Tout au long
de son mouvement, le projectile n’est soumis qu’à son poids
−
→
P , et c’est pourquoi on dit qu’il
est en chute libre.
Figure 4.4 – Mouvement d’un projectile dans un champ de pesanteur uniforme.
Notons −
→
a le vecteur-accélération du projectile. Le théorème du centre d’inertie peut s’écrire :
−
→
P = m−
→
g = m−
→
a
On a donc :
−
→
a
ax = 0
ay = −g
Les composantes du vecteur-vitesse initiale
−
−
→
V0 sont :
−
−
→
V0
V0x = V0 cos α
V0y = V0 sin α
La vitesse
−
→
V (t) du projectile à l’instant t est donc :
−
→
V (t)
Vx(t) = V0 cos α
Vy(t) = −gt + V0 sin α
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-198-320.jpg)

![CHAPITRE 4. MOUVEMENTS À ACCÉLÉRATION CONSTANTE 189
=⇒ −
gD
2V0
2
cos2 α
+
sin α
cos α
= 0
=⇒ −
gD
2V0
2
cos α
+ sin α = 0
=⇒ D =
2V0
2
cos α sin α
g
La portée D s’exprime donc par :
D =
V0
2
sin 2α
g
(4.19)
Le module V0 du vecteur-vitesse initiale restant inchangé, on peut ajuster l’angle α de telle
sorte que le projectile retombe le plus loin possible de son point de lancement. La portée D sera
maximale si le terme sin 2α est maximal. Or, on sait que la fonction sinus est majorée :
sin 2α ≤ 1
=⇒ 2α ≤ 90°
=⇒ α ≤ 45°
Lorsque le vecteur-vitesse initiale est incliné d’un angle de α = 45° par rapport à l’horizontale,
la portée est donc maximale et vaut :
Dmax =
V0
2
g
(4.20)
Pour une portée D Dmax, on a la relation :
−
g
2V0
2
cos2 α
D2
+ D tan α = 0
Or, on a la relation trigonométrique :
1
cos2 α
= tan2
α + 1
On a donc :
−
gD
2V0
2 tan2
α + 1
+ tan α = 0
On obtient donc l’équation :
gD
2V0
2 tan2
α − tan α +
gD
2V0
2 = 0
L’équation ci-dessus admet dans l’intervalle ] 0° ; 90° [ deux solutions α1 45° et α2 45° qui
correspondent aux deux valeurs de l’angle de tir α pour lesquelles on obtient une même portée
D Dmax. Le tir est dit tendu pour α = α1, et en cloche pour α = α2. On démontre que :
α1 + α2 = 90° (4.21)
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-200-320.jpg)











![CHAPITRE 4. MOUVEMENTS À ACCÉLÉRATION CONSTANTE 202
On suppose que τ = 0, 25 s.
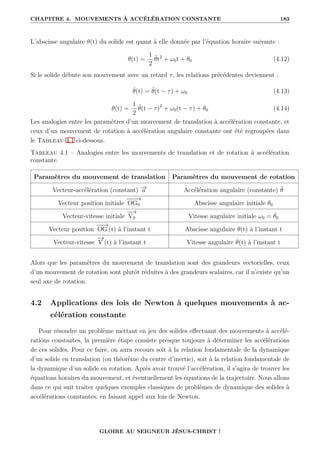
4- Déterminer la valeur de tr.
5- En déduire la valeur de V0 pour que les deux balles entrent effectivement en collision à la
date t = tr.
6- Déterminer l’abscisse X et l’ordonnée Y du point où la collision a lieu.
7- Déterminer les modules v1 et v2 des vitesses de chaque balle au moment de la collision.
Exercice 4.10 :
Un joueur de football s’exerce à tirer les coup-francs. Le ballon sphérique de rayon r = 11 cm est
posé sur le terrain supposé parfaitement horizontal, comme illustré à la Figure 4.14 ci-dessous.
A une distance dM = 10 m du ballon se trouve un accessoire d’entraînement, qui fait office d’un
mur de hauteur hM = 1, 8 m. A une distance dB = 20 m du ballon se trouve la ligne des buts
de hauteur hB = 2, 42 m. Le joueur frappe le ballon avec une vitesse initiale
−
−
→
V0 de module
V0 = 79, 69 km.h−1
qui fait avec l’horizontale un angle α ∈ ] 0° ; 90° [. On considère le repère
cartésien (O ; x ; y) tel que l’axe horizontal (Ox) coïncide avec le terrain, et l’axe vertical (Oy)
passe par la position initiale du centre du ballon. La résistance de l’air sera négligée.
Figure 4.14 – Exercice 4.10.
1- Déterminer les expressions des composantes de la vitesse
−
→
V (t) et du vecteur position
−
−
→
OC (t)
du centre du ballon.
2- En déduire l’équation de la trajectoire du centre du ballon.
3- Exprimer les hauteurs h0
M et h0
B du centre du ballon par rapport au sol lorsqu’il se trouve
respectivement au niveau du mur et au niveau de la ligne des buts.
4- Démontrer que pour que le ballon passe au-dessus du mur, et qu’il soit cadré (il rentre dans
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-213-320.jpg)


























![CHAPITRE 4. MOUVEMENTS À ACCÉLÉRATION CONSTANTE 229
=⇒
2D
a1
Ê
2 (D − x0)
a2
− τ
!2
=⇒
1
a1
È
2(D−x0)
a2
− τ
2
2D
=⇒ a1
2D
È
2(D−x0)
a2
− τ
2
D’où :
a1m =
2D
€È 2(D−x0)
a2
− τ
Š2
3- A l’instant t1 où la voiture (1) rattrape la voiture (2), on a :
x1 (t = t1) = x2 (t = t2) avec t ≥ τ
=⇒
a1
2
(t1 − τ)2
=
a2
2
t1
2
+ x0
=⇒ a1 t1
2
− 2τt1 + τ2
= a2t1
2
+ 2x0
=⇒ (a1 − a2) t1
2
− 2a1τt1 + a1τ2
− 2x0 = 0
Le discriminant de l’équation du second degré ci-dessus vaut :
∆ = 4a1
2
τ2
− 4 (a1 − a2) a1τ2
− 2x0
= 4
a1
2
τ2
− (a1 − a2) a1τ2
− 2x0
=⇒
√
∆ =
p
4 [a1
2τ2 − (a1 − a2) (a1τ2 − 2x0)]
= 2
p
a1
2τ2 − (a1 − a2) (a1τ2 − 2x0)
On a donc :
t1 =
2a1τ ± 2
p
a1
2τ2 − (a1 − a2) (a1τ2 − 2x0)
2 (a1 − a2)
D’où :
t1 =
a1τ ±
p
a1
2τ2 − (a1 − a2) (a1τ2 − 2x0)
(a1 − a2)
Application numérique :
t1 =
14 × 3 ±
p
142
× 32 − (14 − 4) (14 × 32 − 2 × 2)
(14 − 4)
Soit :
t1 = 1, 867 s ou t1 = 6, 532 s
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-240-320.jpg)




















![CHAPITRE 4. MOUVEMENTS À ACCÉLÉRATION CONSTANTE 250
=⇒ −
gdB
2
2V0
2
cos2 α
+ dB tan α + r hB − r
=⇒ −
gdB
2
2V0
2
cos2 α
+ dB tan α − hB + 2r 0
=⇒ −
gdB
2
2V0
2 1 + tan2
α
+ dB tan α − hB + 2r 0
=⇒ −
gdB
2
2V0
2 tan2
α + dB tan α −
gdB
2
2V0
2 − hB + 2r 0
=⇒
gdB
2
2V0
2 tan2
α − dB tan α +
gdB
2
2V0
2 + hB − 2r 0
L’application numérique donne :
9, 8 × 202
2 ×
€
79,69
3,6
Š2 tan2
α − 20 tan α +
9, 8 × 202
2 ×
€
79,69
3,6
Š2 + 2, 42 − 2 × 0, 11 0
On a donc :
4 tan2
α − 20 tan α + 6, 2 0
=⇒ tan2
α − 5 tan α + 1, 55 0
Pour que le ballon passe au-dessus du mur, et qu’il soit cadré, l’angle α doit donc vérfier le
système d’inéquations ci-dessous :
tan2
α − 10 tan α + 2, 8 0
tan2
α − 5 tan α + 1, 55 0
5- Considérons l’équation du second degré ci-dessous :
tan2
α − 10 tan α + 2, 8 = 0
Les solutions de cette équation sont :
tan α =
10 ±
p
102 − (4 × 1 × 2, 8)
2
=⇒ tan α = 0, 288 ou tan α = 9, 711
=⇒ α = 16, 09◦
ou α = 84, 12◦
La solution de l’inéquation tan2
α − 10 tan α + 2, 8 0 dans l’intervalle ] 0° ; 90° [ est donc
l’intervalle ] 16, 09◦
; 84, 12◦
[.
Considérons l’équation du second degré ci-dessous :
tan2
α − 5 tan α + 1, 55 = 0
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-261-320.jpg)
![CHAPITRE 4. MOUVEMENTS À ACCÉLÉRATION CONSTANTE 251
Les solutions de cette équation sont :
tan α =
5 ±
p
52 − (4 × 1 × 1, 55)
2
=⇒ tan α = 0, 332 ou tan α = 4, 667
=⇒ α = 18.36° ou α = 77.91°
La solution de l’inéquation tan2
α − 5 tan α + 1, 55 0 dans l’intervalle ] 0° ; 90° [ est donc
] 0° ; 18, 36◦
[ ∪ ] 77, 91◦
; 90° [.
L’angle α est donc tel que :
α ∈ ] 16, 09◦
; 84, 12◦
[ ∩ {] 0° ; 18, 36◦
[ ∪ ] 77, 91◦
; 90° [}
Les deux intervalles possibles dans lesquels α doit se situer pour que le ballon
passe au-dessus du mur et qu’il rentre dans les buts sont donc ] 16, 09◦
; 18, 36◦
[
et ] 77, 91◦
; 84, 12◦
[.
Exercice 4.11 :
1- La bille est soumise à son poids
−
→
P et à la réaction normale
−
→
R de ce plan. Le théorème du
centre d’inertie peut s’écrire :
−
→
P
Px = 0
Py = −mg sin α
Pz = −mg cos α
+
−
→
R
Rx = 0
Ry = 0
Rz = R
= m−
→
a
max
may
maz = 0
D’où :
−
→
a
ax = 0
ay = −g sin α
az = 0
De même, le vecteur-vitesse initiale
−
−
→
V0 est tel que :
−
−
→
V0
V0x = V0 cos β
V0y = V0 sin β
V0z = 0
2- Au départ, la bille se trouve à l’origine du repère. On a donc :
−
→
V (t)
Vx (t) = V0 cos β
Vy (t) = − (g sin α) t + V0 sin β
Vz (t) = 0
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-262-320.jpg)


















































![CHAPITRE 5. MOUVEMENTS CIRCULAIRES UNIFORMES 303
D’où :
h2 = (RM + h1) 3
Ê
MT
MM
− RT
5- On a h1 = 16 623, 22 km. En faisant l’application numérique de l’expression de h2 obtenue
précédemment, on obtient :
h2 = (3389, 5 + 16 623, 22) × 3
Ê
5, 972 × 1024
6, 39 × 1023
− 6371
Soit :
h2 = 35 783, 677 km
Les deux satellites étant synchrones, ils ont la même période T1 = T2. On a :
T1 = T2 = 2π
s
(RM + h1)3
GMM
Application numérique :
T1 = T2 = 2 × π ×
s
[103 (3389, 5 + 16 623, 22)]3
6, 67 × 10−11 × 6, 39 × 1023
Soit :
T1 = T2 = 86163, 97 s ' 86164 s
Le jour sidéral correspond à la période de rotation de la Terre autour d’elle même. La durée du
jour sidéral vaut 23 heures 56 minutes et 4 secondes. Or, une minute correspond à 60 secondes,
et une heure correspond à 60 minutes, soit 60 × 60 = 3600 secondes. Le jour sidéral est donc
encore égal à 23 × 3600 + 56 × 60 + 4 = 86164 s. On constate donc que la période des deux
satellites est égale à la période de rotation de la Terre. Or, c’est le satellite (2) qui orbite autour
de la Terre dans son plan équatorial : Le satellite (2) est donc géostationnaire.
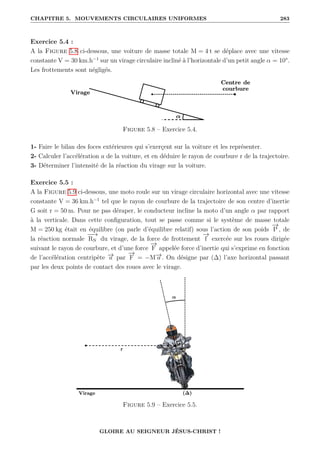
Exercice 5.7 :
1- Le Tableau 5.1 a été complété dans le Tableau 5.2 ci-dessous.
Tableau 5.2 – Correction de l’exercice 5.7.
h (km) 10 000 20 000 30 000 40 000 50 000 60 000
T (s) 17 363, 5 25 246 34 013, 3 43 633, 5 54 020, 7 65 122, 2
(RU + h)3
(1022
m3
) 4, 42 9, 33 16, 97 27, 92 42, 8 62, 2
T2
(108
s2
) 3 6, 37 11, 57 19 29, 18 42, 4
2- Au cours de son mouvement, le satellite n’est soumis qu’à la force gravitationnelle
−
→
F cen-
tripète exercée par la planète. Son accélération −
→
a est elle aussi centripète, et si m est la masse
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-314-320.jpg)













![CHAPITRE 6. GÉNÉRALITÉS SUR LES SYSTÈMES OSCILLANTS 317
6.2 Grandeur physique associée à un phénomène oscillatoire
A tout phénomène oscillatoire est associée une grandeur physique x(t) qu’on qualifie généra-
lement de signal, et qui traduit l’évolution du phénomène au cours du temps. Si le phénomène
est périodique, la fonction x(t) est elle aussi périodique. Elle se présente généralement sous la
forme d’une fonction sinusoïdale, et sa courbe représentative en fonction du temps est une
sinusoïde. Lorsque la grandeur physique associée à un phénomène oscillatoire est une fonction
sinusoïdale, l’oscillateur en question est dit haromonique. On a :
x(t) = asin (ωt + ϕ) ou x(t) = acos (ωt + ϕ) (6.3)
Dans ces deux expressions, a désigne l’amplitude de x(t). C’est la valeur maximale que peut
prendre le signal x(t). ω est la pulsation, le terme ωt + ϕ désigne la phase à l’instant t,
et ϕ représente la phase à l’origine, c’est-à-dire la phase à l’instant t = 0. ϕ s’exprime en
radians (rad). Il est plus commode de s’assurer que ϕ appartienne à l’intervalle [−π ; π]. Si
ϕ n’appartient pas à cet intervalle, il est judicieux de le remplacer par sa mesure principale.
La Figure 6.1 ci-dessous représente la courbe d’évolution d’une fonction sinusoïdale x(t) en
fonction du temps.
Figure 6.1 – Représentation graphique d’une fonction sinusoïdale.
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-328-320.jpg)




![CHAPITRE 6. GÉNÉRALITÉS SUR LES SYSTÈMES OSCILLANTS 322
Dans le triangle ABB0
, on peut encore écrire :
sin ϕ1 =
B0B
AB
=
C0C00
a1
=⇒ C0C00 = a1 sin ϕ1
Toujours dans le triangle BCC00
, on peut écrire :
sin ϕ2 =
C00C
BC
=
C00C
a2
=⇒ C00C = a2 sin ϕ2
On a donc :
AC0 = a1 cos ϕ1 + a2 cos ϕ2 et C0C = a1 sin ϕ1 + a2 sin ϕ2
On peut donc écrire finalement :
A2
= (a1 cos ϕ1 + a2 cos ϕ2)2
+ (a1 sin ϕ1 + a2 sin ϕ2)2
= a1
2
cos2
ϕ1 + a2
2
cos2
ϕ2 + 2a1a2 cos ϕ1 cos ϕ2
+ a1
2
sin2
ϕ1 + a2
2
sin2
ϕ2 + 2a1a2 sin ϕ1 sin ϕ2
= a1
2
cos2
ϕ1 + sin2
ϕ1
+ a2
2
cos2
ϕ2 + sin2
ϕ2
+ 2a1a2 (cos ϕ1 cos ϕ2 + sin ϕ1 sin ϕ2)
= a1
2
+ a2
2
+ 2a1a2 cos (ϕ1 − ϕ2)
L’amplitude A du signal résultant x(t) a donc pour expression :
A =
p
a1
2 + a2
2 + 2a1a2 cos (ϕ1 − ϕ2) (6.12)
Dans le triangle ACC0
, on peut écrire :
tan φ =
C0C
AC0
=
a1 sin ϕ1 + a2 sin ϕ2
a1 cos ϕ1 + a2 cos ϕ2
La phase à l’origine φ du signal résultant x(t) est donc telle que :
φ = tan−1
a1 sin ϕ1 + a2 sin ϕ2
a1 cos ϕ1 + a2 cos ϕ2
‹
+kπ avec k ∈ Z (6.13)
Dans l’intervalle [−π ; π] :
— Si C0C ≥ 0 et AC0 ≥ 0, φ ∈
0 ; π
2
.
— Si C0C ≥ 0 et AC0 ≤ 0, φ ∈
π
2
; π
.
— Si C0C ≤ 0 et AC0 ≤ 0, φ ∈
−π ; − π
2
.
— Si C0C ≤ 0 et AC0 ≥ 0, φ ∈
− π
2
; 0
.
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-333-320.jpg)


































![CHAPITRE 7. OSCILLATEURS MÉCANIQUES 357
On rappelle les formules de dérivation des fonctions sinusoïdales :
d
dt
[χm cos (ω0t + ϕ)] = −χmω0 sin (ω0t + ϕ) (7.4)
d
dt
[χm sin (ω0t + ϕ)] = χmω0 cos (ω0t + ϕ) (7.5)
Pour établir l’équation différentielle satisfaite par la grandeur χ associée à un oscillateur mé-
canique, on peut se servir de la relation fondamentale de la dynamique. Si le système effectue
un mouvement de translation, on se sert du théorème du centre d’inertie. Lorsque l’oscillateur
est en mouvement, la résultante des forces qu’il subit est fonction de χ, tandis que son vecteur-
accélération s’exprime en fonction de χ̈. m étant la masse de l’oscillateur, on peut écrire :
X −
−
→
Fext (χ) = m−
→
a (χ̈) (7.6)
Si le système effectue un mouvement de rotation autour d’un axe (∆), on utilise la relation
fondamentale de la dynamique d’un solide en rotation. J(∆) désignant le moment d’inertie du
système par rapport à l’axe (∆), de façon analogue à la relation (7.6), on peut écrire :
X
M(∆) (χ) = J(∆)θ̈ (χ̈) (7.7)
On peut également avoir recours à la relation traduisant la conservation de l’énergie mécanique
afin de déterminer l’équation différentielle du mouvement d’un oscillateur mécanique. En effet,
en l’absence des forces dissipatives, l’énergie mécanique Em du système se conserve au cours du
temps et garde de ce fait la même valeur. Par conséquent, sa dérivée par rapport au temps est
nulle. On dit que le système est conservatif. On peut ainsi écrire :
dEm
dt
= 0 (7.8)
On rappelle que l’énergie mécanique d’un système est égale à la somme de son énergie cinétique
fonction de sa vitesse, et de son énergie potentielle fonction de sa position. Soit :
Em (χ, χ̇) = Ec (χ̇) + Ep (χ) (7.9)
On donne ci-dessous deux formules de dérivation importantes :
d
dt
χ2
(t)
= 2χ̇ (t)χ (t) (7.10)
d
dt
χ̇2
(t)
= 2χ̈ (t)χ̇ (t) (7.11)
Les oscillations d’un système mécanique sont dites libres si elles s’effectuent sans l’intervention
d’une force excitatrice extérieure. Dans le cas contraire, elles sont dites forcées. Si le système
est soumis à des forces dissipatives, les oscillations sont dites amorties, et l’amplitude des
oscillations décroît avec le temps. Dans ce cas, l’énergie mécanique ne se conserve plus.
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-368-320.jpg)


![CHAPITRE 7. OSCILLATEURS MÉCANIQUES 360
Le système étant conservatif, on peut écrire :
dEm (x, ẋ)
dt
= 0
=⇒
1
2
[2mẍẋ − 2mgẋ sin α + 2kẋ (∆` + x)] = 0
=⇒ mẍ −mg sin α + k∆`
| {z }
0
+kx = 0
On retrouve donc la même équation différentielle :
ẍ +
k
m
x = 0
On constate que l’angle α n’intervient pas dans l’équation différentielle. On obtiendrait donc
la même équation pour un pendule élastique horizontal ou vertical.
7.2.2 Pendule pesant
Considérons à la Figure 7.2 ci-dessous un solide de masse M et de centre de gravité G fixé
en un point O. Si on l’écarte par rapport à la verticale et qu’on le lâche sans aucune vitesse,
il effectuera des oscillations autour de l’axe horizontal (∆) passant par O. Le solide constitue
ainsi un pendule pesant. On désigne par θ l’écart angulaire du solide compté à partir de sa
position d’équilibre.
Figure 7.2 – Pendule pesant.
Notons J(∆) le moment d’inertie du solide par rapport à (∆). Le solide n’est soumis qu’à son
poids
−
→
P appliqué en son centre de gravité G et à la réaction
−
→
R appliquée en O. La relation
fondamentale de la dynamique peut s’écrire :
M(∆)
€−
→
P
Š
= −MgOG sin θ = J(∆)θ̈
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-371-320.jpg)



![CHAPITRE 7. OSCILLATEURS MÉCANIQUES 364
Le solide restant dans le même plan horizontal, son énergie potentielle de pesanteur ne varie
pas. L’énergie potentielle de torsion quant à elle s’exprime par :
Ept (α) =
1
2
Cα2
L’énergie mécanique du système a donc pour expression :
Em (α̇, α) = Ec (α̇) + Ept (α) =
1
2
J(∆)α̇2
+ Cα2
Le système étant conservatif, on peut écrire :
dEm (α, α̇)
dt
= 0
=⇒
1
2
2J(∆)α̇α̈ + Cα̇α
= 0
=⇒ J(∆)α̈ + Cα = 0
On obtient donc la même équation différentielle :
α̈ +
C
J(∆)
α = 0
Contrairement au pendule pesant et au pendule simple, le pendule de torsion reste un oscillateur
harmonique même quand l’amplitude des oscillations est grande.
7.3 Oscillations mécaniques amorties
Lorsque des forces dissipatives entrent en jeu au cours des oscillations d’un système mé-
canique, l’amplitude décroît progressivement en fonction du temps, et l’énergie mécanique di-
minue peu à peu. Les oscillations sont alors dites amorties. En désignant par χ la grandeur
caractéristique associée à l’oscillateur mécanique considéré, l’équation différentielle qui régit les
oscillations amorties prend la forme :
χ̈ + ηχ̇ + ω0
2
χ = 0 (7.26)
η est un coefficient constant qui reflète l’amortissement des oscillations. L’équation différentielle
précédente admet très souvent pour solution la fonction définie par :
χ (t) = χm cos (ωt + ϕ) exp (−λt) ou χ (t) = χm sin (ωt + ϕ) exp (−λt) (7.27)
ω et λ sont des constantes positives, et le terme exp (−λt) est responsable de la diminution de
l’amplitude des oscillations. exp (t), qu’on peut encore noter et
désigne la fonction exponen-
tielle et respecte la formule de dérivation ci-dessous :
d
dt
[exp (γt)] = γ exp (γt) (7.28)
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-375-320.jpg)

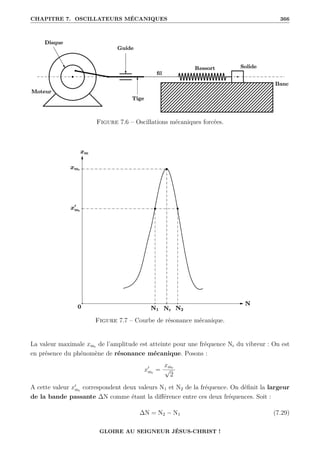











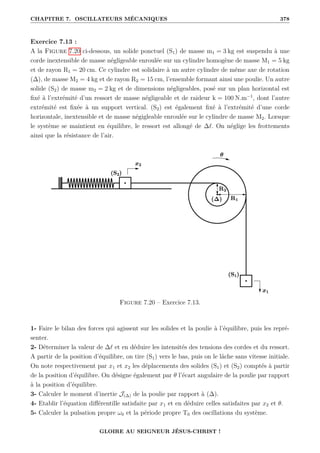
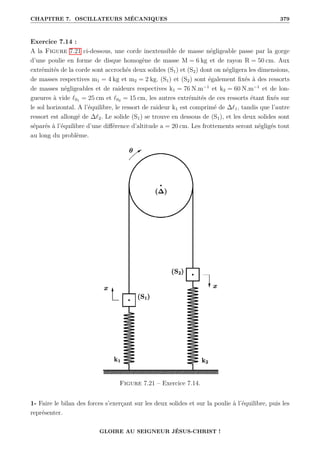







![CHAPITRE 7. OSCILLATEURS MÉCANIQUES 387
D’où :
Epp (x) =
1
2`
mgx2
L’énergie potentielle élastique est donnée par :
Epe (x) =
1
2
kx2
L’énergie mécanique quant à elle s’exprime par :
Em (x, ẋ) = Ec (ẋ) + Epp (x) + Epe (x)
D’où :
Em (x, ẋ) =
1
2`
m`ẋ2
+ (mg + k`) x2
3- L’absence des forces résistives entraîne la conservation de l’énergie mécanique du système.
On a donc :
dEm (x, ẋ)
dt
= 0
=⇒
1
2`
[2m`ẍẋ + 2 (mg + k`) ẋx] = 0
=⇒ m`ẍ + (mg + k`) x = 0
L’équation différentielle vérifiée par x est donc :
ẍ +
g
`
+
k
m
‹
x = 0
On a :
α =
x
`
=⇒ x = `α et ẍ = `α̈
On a donc :
`α̈ + `
g
`
+
k
m
‹
α = 0
L’équation différentielle vérifiée par α est donc :
α̈ +
g
`
+
k
m
‹
α = 0
4- La pulsation propre ω0 est telle que :
ω0
2
=
g
`
+
k
m
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-398-320.jpg)







![CHAPITRE 7. OSCILLATEURS MÉCANIQUES 395
4- L’énergie cinétique du solide s’exprime en fonction de ẋ par la relation :
Ec (ẋ) =
1
2
mẋ2
En considérant que l’énergie potentielle de pesanteur du solide est nulle lorsqu’il est en équilibre,
cette énergie potentielle s’exprimera en fonction de x selon la relation :
Epp (x) = −mgx sin α
L’énergie potentielle élastique quant à elle a pour expression :
Epe (x) =
1
2
”
k1 (∆`1 + x)2
+ k2 (∆`2 + x)2
—
L’énergie mécanique s’exprime donc par :
Em (x, ẋ) = Ec (ẋ) + Epp (x) + Epe (x)
=
1
2
”
mẋ2
− 2mgx sin α + k1 (∆`1 + x)2
+ k2 (∆`2 + x)2
—
Les forces non conservatives étant absentes, l’énergie mécanique de tout le système se conserve
au cours du temps. On a donc :
dEm (x, ẋ)
dt
= 0
=⇒
1
2
[2mẍẋ − 2mgẋ sin α + 2k1ẋ (∆`1 + x) + 2k2ẋ (∆`2 + x)] = 0
=⇒ mẍ − mg sin α + k1 (∆`1 + x) + k2 (∆`2 + x) = 0
=⇒ mẍ + k1x + k2x = mg sin α − k1∆`1 − k2∆`2 = 0
On retrouve l’équation différentielle qui régit le mouvement du solide :
ẍ +
k1 + k2
m
x = 0
5- La pulsation propre ω0 est telle que :
ω0
2
=
k1 + k2
m
D’où :
ω0 =
Ê
k1 + k2
m
Application numérique :
ω0 =
Ê
40 + 72, 5
2
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-406-320.jpg)














![CHAPITRE 7. OSCILLATEURS MÉCANIQUES 410
Du théorème de Huyguens, on peut écrire :
Jc(∆) = M1R1
2
+ M1R1
2
= 2M1R1
2
Jd(∆) =
1
2
M2R2
2
+ M2 (2R1 + R2)2
=
1
2
M2R2
2
+ M2 4R1
2
+ R2
2
+ 4R1R2
=
1
2
M2R2
2
+ 4M2R1
2
+ M2R2
2
+ 4M2R1R2
= 4M2R1
2
+
3
2
M2R2
2
+ 4M2R1R2
On a donc :
J(∆) = 2M1R1
2
+ 4M2R1
2
+
3
2
M2R2
2
+ 4M2R1R2 = 2 (M1 + 2M2) R1
2
+
3
2
M2R2
2
+ 4M2R1R2
D’où :
J(∆) =
1
2
4 (M1 + 2M2) R1
2
+ 3M2R2
2
+ 8M2R1R2
3- Le système est équivalent à un solide de masse (M1 + M2) et de centre de gravité G. Le
moment M par rapport à (∆) du poids du système est donné par :
M = − (M1 + M2) gOG sin θ
= − (M1 + M2) g
(M1 + 2M2) R1 + M2R2
M1 + M2
sin θ
= −g [(M1 + 2M2) R1 + M2R2] sin θ
La relation fondamentale de la dynamique peut s’écrire :
M = J(∆)θ̈
=⇒ −g [(M1 + 2M2) R1 + M2R2] sin θ =
1
2
4 (M1 + 2M2) R1
2
+ 3M2R2
2
+ 8M2R1R2
θ̈
=⇒ −2g [(M1 + 2M2) R1 + M2R2] sin θ =
4 (M1 + 2M2) R1
2
+ 3M2R2
2
+ 8M2R1R2
θ̈
=⇒
4 (M1 + 2M2) R1
2
+ 3M2R2
2
+ 8M2R1R2
θ̈ + 2g [(M1 + 2M2) R1 + M2R2] sin θ = 0
Les oscillations étant de faible amplitude, sin θ ' θ. Soit :
4 (M1 + 2M2) R1
2
+ 3M2R2
2
+ 8M2R1R2
θ̈ + 2g [(M1 + 2M2) R1 + M2R2] θ = 0
L’équation différentielle satisfaite par θ est donc :
θ̈ +
2g [(M1 + 2M2) R1 + M2R2]
4 (M1 + 2M2) R1
2
+ 3M2R2
2
+ 8M2R1R2
θ = 0
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-421-320.jpg)
![CHAPITRE 7. OSCILLATEURS MÉCANIQUES 411
4- La pulsation ω0 des oscillations est telle que :
ω0
2
=
2g [(M1 + 2M2) R1 + M2R2]
4 (M1 + 2M2) R1
2
+ 3M2R2
2
+ 8M2R1R2
Dans le cas où M1 = 2M2 = 2M et R1 = 2R2 = 2R, on a :
ω0
2
=
2g [(2M + 2M) (2R) + MR]
4 (2M + 2M) (2R)2
+ 3MR2 + 8M (2R) R
=
2g [8MR + MR]
64MR2 + 3MR2 + 16MR2
=
18g
83R
=⇒ ω0 =
É
18g
83R
La période propre T0 s’exprime donc par :
T0 = 2π
Ê
83R
18g
5- Si le pendule bat la seconde, alors sa période propre est égale à 2 secondes. On a donc :
2π
Ê
83R
18g
= 2
=⇒ π2 83R
18g
= 1
=⇒ R =
18g
83π2
Or, R1 = 2R et R2 = R. D’où :
R1 =
36g
83π2
R2 =
18g
83π2
Applications numériques :
R1 =
36 × 9, 8
83 × π2
R2 =
18 × 9, 8
83 × π2
Soit :
R1 = 430, 676 mm
R2 = 215, 338 mm
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-422-320.jpg)


![CHAPITRE 7. OSCILLATEURS MÉCANIQUES 414
Exercice 7.12 :
1- Lorsque le solide est écarté de sa position d’équilibre d’une distance x, il est soumis à la
tension de rappel du ressort et à la force de frottement visqueux. Le théorème du centre d’inertie
peut s’écrire :
−kx − λV = mẍ
Or, V = ẋ. Soit :
−kx − λẋ = mẍ
=⇒ ẍ +
λ
m
ẋ +
k
m
x = 0
L’équation différentielle du mouvement du solide peut donc se mettre sous la forme :
ẍ + aẋ + bx = 0
Avec :
a =
λ
m
b =
k
m
Applications numériques :
a =
40
2
b =
250
2
Soit :
a = 20 N.s.m−1
.kg−1
b = 125 N.m−1
.kg−1
2- Pour que la fonction x(t) = A cos (ω0t + ϕ) exp (αt) soit solution de l’équation différentielle
précédente, on doit avoir :
ẍ(t) + aẋ(t) + bx(t) = 0
On a :
ẋ(t) =
dx(t)
dt
= A [−ω0 sin (ω0t + ϕ) exp (αt) + α cos (ω0t + ϕ) exp (αt)]
= A [α cos (ω0t + ϕ) − ω0 sin (ω0t + ϕ)] exp (αt)
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-425-320.jpg)
![CHAPITRE 7. OSCILLATEURS MÉCANIQUES 415
ẍ(t) =
dẋ(t)
dt
= A
−αω0 sin (ω0t + ϕ) − ω0
2
cos (ω0t + ϕ)
exp (αt)
+ A
α2
cos (ω0t + ϕ) − αω0 sin (ω0t + ϕ)
exp (αt)
= A
α2
− ω0
2
cos (ω0t + ϕ) − 2αω0 sin (ω0t + ϕ)
exp (αt)
Ainsi, on a :
ẍ(t) + aẋ(t) + bx(t) = A
α2
− ω0
2
+ αa + b
cos (ω0t + ϕ)
exp (αt)
+ A [(−2αω0 − aω0) sin (ω0t + ϕ)] exp (αt)
= 0
=⇒ A
α2
− ω0
2
+ αa + b
cos (ω0t + ϕ) + (−2αω0 − aω0) sin (ω0t + ϕ)
exp (αt) = 0
Les coefficients de cos (ω0t + ϕ) et sin (ω0t + ϕ) doivent être nuls. On a donc :
α2
− ω0
2
+ αa + b = 0
−2αω0 − aω0 = 0
De la deuxième équation du système ci-dessus, on obtient :
α = −
a
2
On a donc :
a2
4
− ω0
2
−
a2
2
+ b = 0
=⇒ ω0
2
= −
a2
4
+ b = 0
On a donc finalement :
α = −
a
2
ω0 =
Ê
−
a2
4
+ b
Applications numériques :
α = −
20
2
ω0 =
Ê
−
202
4
+ 125
Soit :
α = −10 s−1
ω0 = 5 rad.s−1
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-426-320.jpg)


![CHAPITRE 7. OSCILLATEURS MÉCANIQUES 418
4- Lorsque les deux solides et la poulie sont écartés de la position d’équilibre respectivement
de x1, x2 et θ, la relation fondamentale de la dynamique appliquée au système peut s’écrire :
−T1x + m1g = m1ẍ1
−Tx + T2x = m2ẍ2
T0
1xR1 − T0
2xR2 = J(∆)θ̈
=⇒
−T1x + m1g = m1ẍ1
−k (x2 + ∆`) + T2x = m2ẍ2
T1xR1 − T2xR2 = J(∆)θ̈
=⇒
T1x = m1g − m1ẍ1
T2x = m2ẍ2 + k (x2 + ∆`)
T1xR1 − T2xR2 = J(∆)θ̈
=⇒ R1 (m1g − m1ẍ1) − R2 [m2ẍ2 + k (x2 + ∆`)] = J(∆)θ̈
Or, on a :
θ =
x1
R1
=
x2
R2
; θ̇ =
ẋ1
R1
=
ẋ2
R2
; θ̈ =
ẍ1
R1
=
ẍ2
R2
On a donc :
R1 (m1g − m1ẍ1) − R2
•
m2
R2
R1
ẍ1 + k
R2
R1
x1 + ∆`
‹˜
= J(∆)
1
R1
ẍ1
=⇒ m1R1g − m1R1ẍ1 −
m2R2
2
R1
ẍ1 −
kR2
2
R1
x1 − kR2∆` = J(∆)
1
R1
ẍ1
=⇒ m1R1g − kR2∆` = m1R1ẍ1 +
m2R2
2
R1
ẍ1 +
kR2
2
R1
x1 +
J(∆)
R1
ẍ1
Or, à l’équilibre, nous avons établi précédemment la relation :
m1R1g = kR2∆`
Soit :
m1R1g − kR2∆` = 0
On a donc :
m1R1ẍ1 +
m2R2
2
R1
ẍ1 +
kR2
2
R1
x1 +
J(∆)
R1
ẍ1 = 0
=⇒
‚
m1R1 +
m2R2
2
R1
+
J(∆)
R1
Œ
ẍ1 +
kR2
2
R1
x1 = 0
=⇒ m1R1
2
+ m2R2
2
+ J(∆)
ẍ1 + kR2
2
x1 = 0
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-429-320.jpg)










![CHAPITRE 7. OSCILLATEURS MÉCANIQUES 429
A l’instant initial t = 0 s, θ (t = 0) = Θm. On a donc :
Θm cos ϕ = Θm
=⇒ cos ϕ = 1
=⇒ ϕ = 2kπ ; k ∈ Z
On peut donc prendre ϕ = 0. On a donc :
θ (t) = Θm cos (ω0t)
x(t) = Xm cos (ω0t)
L’énergie cinétique du système s’exprime par :
Ec =
1
2
mẋ2
+
1
2
J(∆)θ̇2
=
1
2
mẋ2
+
1
2
MR2 ẋ2
R2
=
1
2
mẋ2
+
1
2
Mẋ2
=
1
2
(m + M)ẋ2
=
1
2
(m + M)[−Xmω0 sin (ω0t)]2
D’où :
Ec(t) =
1
2
(m + M)ω0
2
Xm
2
sin2
(ω0t)
L’énergie potentielle de pesanteur du système est donnée par :
Epp = −mgx sin α
D’où :
Epp(t) = −mg sin αXm cos (ω0t)
L’énergie potentielle élastique emmagasinnée par le ressort a pour expression :
Epe =
1
2
k (x + ∆`)2
=
1
2
k x2
+ 2x∆` + ∆`2
=
1
2
kx2
+ kx∆` +
1
2
k∆`2
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-440-320.jpg)
![CHAPITRE 7. OSCILLATEURS MÉCANIQUES 430
D’où :
Epe(t) =
1
2
kXm
2
cos2
(ω0t) + k∆`Xm cos (ω0t) +
1
2
k∆`2
L’énergie mécanique du système s’exprime par :
Em(t) = Ec(t) + Epp(t) + Epe(t)
Soit :
Em(t) = 1
2
(m + M)ω0
2
Xm
2
sin2
(ω0t)−mg sin αXm cos (ω0t)
+ 1
2
kXm
2
cos2
(ω0t) + k∆`Xm cos (ω0t) + 1
2
k∆`2
=⇒ Em(t) = 1
2
Xm
2
[ω0
2
(m + M) sin2
(ω0t) + k cos2
(ω0t)]
+(−mg sin α + k∆`) Xm cos (ω0t) + 1
2
k∆`2
Or, on a établi précédement la relation :
k = ω0
2
(m + M)
De même, on a :
mg sin α = k∆`
On a alors :
Em(t) =
1
2
Xm
2
k sin2
(ω0t) + k cos2
(ω0t)
+
1
2
k∆`2
=⇒ Em(t) =
1
2
kXm
2
+
1
2
k∆`2
D’où :
Em(t) =
1
2
k Xm
2
+ ∆`2
= constante
Application numérique :
Em =
50 × 0, 12
+ 0, 086112
2
Soit :
Em = 435, 384 mJ
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-441-320.jpg)












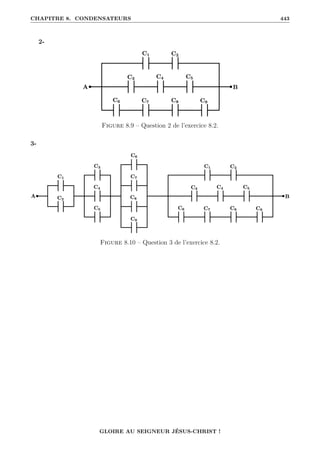
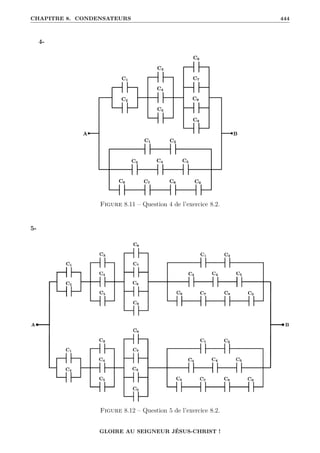
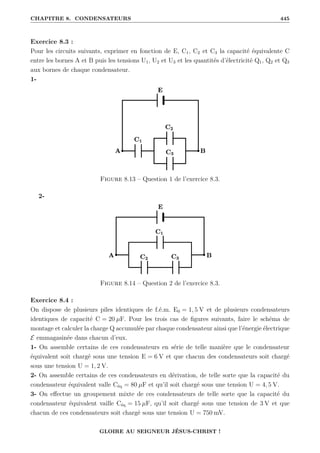


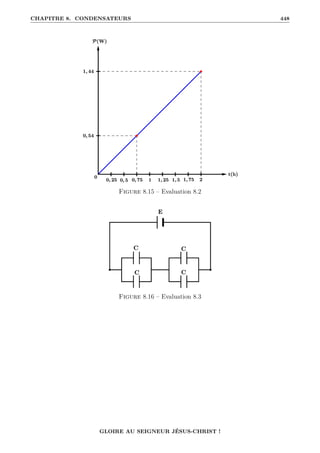

![CHAPITRE 8. CONDENSATEURS 450
3- 3.1- Le condensateur étant branché aux bornes du générateur de courant alternatif, la
tension qui règne à ses bornes est égale à celle délivrée par le générateur. La charge q (t) du
condensateur est donnée par la relation :
q (t) = Ce(t)
Soit :
q (t) = EC cos ωt
L’intensité i(t) du courant traversant le condensateur est donnée par la relation :
i(t) =
dq
dt
D’où :
i(t) = −ECω sin ωt = ECω cos
ωt +
π
2
Le déphasage ϕ de la f.é.m. e(t) par rapport au courant i(t) est donc :
ϕ = −
π
2
3.2- La puissance instantannée P(t) aux bornes du condensateur s’exprime par :
P (t) = u(t)i(t) = −E2
Cω cos ωt sin ωt
D’où :
P (t) = −
1
2
E2
Cω sin 2ωt
3.3- L’énergie électrique E (T) emmagasinée par le condensateur après un temps T est donnée
par la relation :
E (T) =
Z T
0
P(t) dt
=
Z T
0
−
1
2
E2
Cω sin 2ωt
‹
dt
=
1
4
E2
C
Z T
0
(−2ω sin 2ωt) dt
=
1
4
E2
C [cos 2ωt]T
0
D’où :
E(T) =
1
4
CE2
(cos 2ωT − 1)
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-461-320.jpg)

















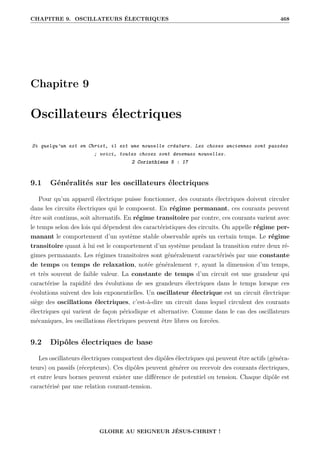




![CHAPITRE 9. OSCILLATEURS ÉLECTRIQUES 473
D’où :
A = ξ0 −
β
α
La solution ξ (t) de l’équation différentielle (9.9) est donc :
ξ (t) =
ξ0 −
β
α
‹
exp (−αt) +
β
α
(9.14)
On définit la constante de temps τ par :
τ =
1
α
(9.15)
Ainsi, plus la valeur de α est élevée, plus la constante de temps τ est faible.
9.3.1.1 Cas particulier où ξ0 = 0 et β 0
Lorsque ξ0 = 0 et β 0, la solution ξ (t) s’exprime par :
ξ (t) =
β
α
[1 − exp (−αt)] (9.16)
La courbe d’évolution en fonction du temps de ξ (t) a été représentée à la Figure 9.6 ci-dessous.
Figure 9.6 – Courbe d’évolution de ξ (t) dans le cas où ξ = 0 et β 0.
La courbe passe par l’origine, et sa tangente en ce point coupe la droite horizontale d’ordonnée
β
α
en un point dont l’abscisse correspond à la constante de temps τ.
9.3.1.2 Cas particulier où ξ0 0 et β = 0
Lorsque ξ0 0 et β = 0, la solution ξ (t) s’exprime par :
ξ (t) = ξ0 exp (−αt) (9.17)
La courbe d’évolution en fonction du temps de ξ (t) a été représentée à la Figure 9.7.
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-484-320.jpg)






















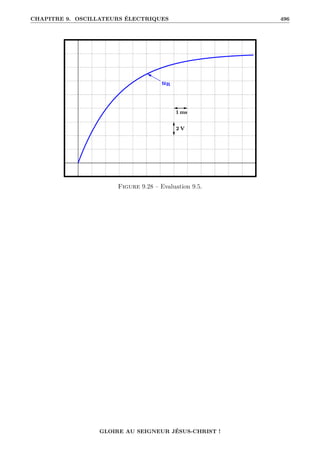
































![CHAPITRE 10. ONDES MÉCANIQUES 530
10.2 Propagation des ondes mécaniques
10.2.1 Cas général
Considérons un milieu élastique non vide. Notons S un point de ce milieu, et perturbons le
en lui imposant un déplacement sinusoïdal χS (t) que l’on exprimera sous la forme ci-dessous :
χS (t) = a sin (ωt + ϕ) = a sin
2π
T
t + ϕ
‹
= a sin (2πNt + ϕ) (10.1)
a est l’amplitude du mouvement du point S, ω sa pulsation, T sa période, N sa fréquence et
ϕ la phase à l’origine. Soit M1 un point du milieu tel que avant la perturbation, la distance
qui le sépare du point S soit SM1 = d1. Le milieu étant élastique, la perturbation du point
S va se propager jusqu’au point M1. Le point S est donc la source d’une onde mécanique
périodique dite progressive. Le point M1 reproduira exactement le mouvement de S, mais
avec un retard τ1 qui correspond à la durée mise par le front d’onde pour atteindre M1 partant
de S. Le déplacement χM1 (t) du point M1 peut donc se mettre sous la forme ci-dessous :
χM1 (t) = a sin [ω (t − τ1) + ϕ], t ≥ τ1 (10.2)
La vitesse avec laquelle la perturbation créée en S se propage dans le milieu élastique est
appelée célérité et se note C. Ayant la dimension d’une vitesse, son unité SI est le m.s−1
. La
célérité d’une onde mécanique dépend des caractéristiques internes du milieu dans lequel elle
se propage. Supposons que la célérité C soit constante dans tout le milieu. On peut écrire la
relation :
C =
d1
τ1
Soit :
τ1 =
d1
C
On définit la longueur d’onde λ comme étant la distance parcourue par l’onde pendant une
période T à la célérité C. Elle a la dimension d’une longueur, et son unité SI est le mètre (m).
On a la relation :
C =
λ
T
= λN (10.3)
D’où :
λ = CT =
C
N
(10.4)
Le retard τ1 peut encore s’exprimer par :
τ1 =
d1T
λ
=
d1
λN
On a donc :
χM1 (t) = a sin
•
ω
t −
d1T
λ
‹
+ ϕ
˜
= a sin
•
2π
T
t −
d1T
λ
‹
+ ϕ
˜
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-541-320.jpg)








![CHAPITRE 10. ONDES MÉCANIQUES 539
10.3.2 Ondes mécaniques stationnaires
Une onde stationnaire est une onde qui résulte de la superposition de deux ondes pro-
gressives de même amplitude, de même fréquence, et se propageant dans le même milieu, dans
la même direction mais dans des sens contraires. Considérons le cas où les déplacements des
points S1 et S2 ont la même amplitude mais des phases à l’origine différentes (ϕ1 6= ϕ2). Le
déplacement total χM (t) de M s’exprime par :
χM (t) = χ1M (t) + χ2M (t)
= a sin
2πNt + ϕ1 −
2π
λ
d1
‹
+ a sin
2πNt + ϕ2 −
2π
λ
d2
‹
, t ≥
d1
λN
et t ≥
d2
λN
Posons :
Φ1 = 2πNt + ϕ1 −
2π
λ
d1
Φ2 = 2πNt + ϕ2 −
2π
λ
d2
On a :
χM (t) = a sin Φ1 + a2 sin Φ2
= 2a cos
Φ1 − Φ2
2
‹
sin
Φ1 + Φ2
2
‹
= 2a cos
•
π (d2 − d1)
λ
+
ϕ1 − ϕ2
2
˜
sin
•
2πNt +
ϕ1 + ϕ2
2
−
π (d1 + d2)
λ
˜
Posons :
d1 = x
Supposons que le point M appartienne au segment [S1S2]. On a donc :
d1 + d2 = D
=⇒ d2 − d1 = D − 2d1 = D − 2x
D’où :
χM (x, t) = 2a cos
•
π (D − 2x)
λ
+
ϕ1 − ϕ2
2
˜
sin
2πNt +
ϕ1 + ϕ2
2
−
πD
λ
‹
(10.15)
L’équation ci-dessus traduit une onde stationnaire. A la différence des ondes progressives, les
ondes stationnaires ne se propagent pas. Dans le cas de la corde étudiée précédemment, l’ex-
témité S étant perturbée, une onde transversale se propage le long de la corde. Lorsque le
front d’onde aura atteint l’autre extrémité fixe P, l’onde sera réfléchie ; une onde de même
fréquence et de même amplitude prendra naissance en P et se propagera dans la corde dans
le sens contraire de l’onde incidente de départ. La superposition des deux ondes donnera alors
naissance à une onde stationnaire sur la corde. On observera la corde vibrer avec plusieurs
fuseaux comme sur la Figure 10.9.
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-550-320.jpg)




![CHAPITRE 10. ONDES MÉCANIQUES 544
Exercice 10.8 :
Un haut-parleur génère en un point O un son qui se propage dans l’air sans atténuissement
avec une fréquence N = 50 Hz et une célérité C = 340 m.s−1
.
1- Déterminer la longueur d’onde λ du son.
2- Soit A un point de l’espace. Déterminer la distance OA parcourue par l’onde sonore à la
date τ1 = 5 s.
3- Déterminer le temps τ2 mis par l’onde sonore depuis le point O pour atteindre un point B
tel que OB = 3, 4 km.
4- Comparer les mouvements des points O, A et B.
Exercice 10.9 :
On considère une corde élastique de longueur L = AB = 2 m placée horizontalement. On excite
ses deux extrémités A et B en leur imposant des mouvements verticaux sinusoïdaux de même
amplitude a, de même fréquence N = 25 Hz et de même phase initiale ϕ. Les ondes qui prennent
naissance en ces deux points se propagent le long de la corde avec la même célérité C = 10 m.s−1
.
Soit M un point de la corde horizontale tel que AM = d.
1- Calculer la longueur d’onde λ des deux ondes créées en A et B.
2- Exprimer les élongations yAM(t) et yBM(t) du point M dues aux ondes respectives créées en
A et B.
3- En déduire l’expression de l’élongation résultante yM(t) en M.
4- Déterminer toutes les valeurs de d pour lesquelles l’amplitude de l’onde résultante au point
M est maximale.
5- Déterminer toutes les valeurs de d pour lesquelles l’amplitude de l’onde résultante au point
M est nulle.
Exercice 10.10 :
Un grand récipient contient de l’eau. On considère deux points O1 et O2 de la surface, distants
de D = 1, 5 m. A l’aide de deux lames vibrant en phase et à la même fréquence N = 30 Hz, on
excite la surface aux points O1 et O2. Des ondes se propagent alors à la surface, avec la même
amplitude a et la même célérité C = 15 m.s−1
. On considère un point M du segment [O1O2] tel
que O1M = d.
1- Calculer la longueur d’onde λ des deux ondes créées en O1 et O2.
2- Exprimer l’amplitude ad de l’onde qui résulte de l’interférence au point M entre les deux
ondes.
3- Déterminer toutes les valeurs de d pour lesquelles l’interférence au point M est constructive.
4- Déterminer toutes les valeurs de d pour lesquelles l’interférence au point M est destructive.
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-555-320.jpg)
![CHAPITRE 10. ONDES MÉCANIQUES 545
Exercice 10.11 :
Deux haut-parleurs placés respectivement aux points S1 et S2 tels que S1S2 = d = 3 m pro-
duisent des ondes sonores de même amplitude a = 4 cm, de même fréquence N = 50 Hz, de
même phase initiale et de même longueur d’onde λ = 80 cm. On considère un point M du seg-
ment [S1S2] tel que S1M = d1 et S2M = d2.
1- Calculer la célérité C des deux ondes crées en S1 et S2.
2- Exprimer l’amplitude aM de l’onde qui résulte de la superposition des deux ondes en M.
3- Déterminer tous les couples (d1 ; d2) pour lesquels aM = 8 cm.
4- Déterminer tous les couples (d1 ; d2) pour lesquels aM = 0 cm.
Exercice 10.12 :
Une chaîne horizontale est constituée de 1001 particules. La première particule de rang 0 est
celle de référence, tandis que le rang de la dernière particule est noté N (N ∈ N∗
). A l’équilibre,
deux particules successives sont séparées par une même distance d = 4 µm. Deux ondes longi-
tudinales de même amplitude a, de même fréquence et de même longueur d’onde λ = 2 mm se
propageant de sens contraire dans la chaîne produisent au point M où se trouve la particule de
rang n (n ∈ N) une onde dont l’amplitude an est donnée par :
an = 2a cos
•
πd
λ
(N − 2n)
˜
1- Déterminer la valeur de N.
2- Déterminer les valeurs de n pour lesquelles l’amplitude de l’onde résultante au point M est
maximale.
3- Déterminer les valeurs de n pour lesquelles l’amplitude de l’onde résultante au point M est
nulle.
Exercice 10.13 :
On considère une corde homogène de masse m = 3 kg et de longueur L = 2, 5 m passant par
la gorge d’une poulie. L’extrémité de la partie verticale de la corde de longueur Lv = 1 m
supporte un solide en fer de forme cubique d’arête a = 52, 1 mm. A l’aide d’une lame vibrant à
la fréquence N = 5 Hz, on excite l’extrémité de la partie horizontale de la corde. Au bout d’un
moment, on observe des ondes stationnaires sur cette partie. Le solide reste immobile tout au
long du mouvement. On prendra la valeur de l’accélération de la pesanteur g = 9, 8 USI et celle
de la masse volumique du fer ρfer = 7800 kg.m−3
.
1- Déterminer le module T de la tension dans la corde.
2- Déterminer la masse linéique µ de la corde et en déduire la célérité C de l’onde produite par
la lame.
3- Déterminer la longueur d’onde λ de l’onde. Combien de fuseaux stables observe-t-on ?
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-556-320.jpg)















![CHAPITRE 10. ONDES MÉCANIQUES 561
4- Mettons l’élongation yO (t) du point O sous la forme :
yO (t) = a sin (2πNt + ϕ)
Soit M un point du segment [OB] tel que OM = x. L’élongation y (t, x) de M s’exprime par :
y (t, x) = a sin
2πNt −
2π
λ
x + ϕ
‹
L’aspect à la date τ de la surface de l’eau vue de profil correspond au tracé de y (t = τ, x) en
fonction de x. On a :
y (t = τ, x) = a sin
2πNτ −
2π
λ
x + ϕ
‹
dy
dx
(t = τ, x) = −
2πa
λ
cos
2πNτ −
2π
λ
x + ϕ
‹
De la Figure 10.12, on se rend compte que :
y (t = τ, x = 0) = 0 et
dy
dx
(t = τ, x = 0) 0
Soit :
sin (2πNτ + ϕ) = 0 et cos (2πNτ + ϕ) 0
On a donc :
2πNτ + ϕ = π
=⇒ ϕ = π − 2πNτ = π − 10π = −9π
Or, π est la mesure principale de −9π. L’élongation yO(t) du point O peut donc se mettre sous
la forme ci-dessous :
yO(t) = 5 sin (5πt + π) en mm
Exercice 10.7 :
1- La différence de phase φn,n+i de l’atome de rang n par rapport à l’atome de rang n + i a pour
expression :
φn,n+i = −
2πnd
λ
+
2πd (n + i)
λ
=
2πid
λ
La différence de phase φn−i,n de l’atome de rang n − i par rapport à l’atome de rang n a pour
expression :
φn−i,n = −
2πd (n − i)
λ
+
2πnd
λ
=
2πid
λ
= φn,n+i
La différence de phase φn−i,n+i de l’atome de rang n − i par rapport à l’atome de rang n + i a
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-572-320.jpg)

















![CHAPITRE 11. OPTIQUE ONDULATOIRE ET CORPUSCULAIRE 580
longueur d’onde λ éclairant un diaphragme vertical percé de deux petites fentes F1 et F2. Il
se produit un phénomène de diffraction à chaque fente. Ces deux fentes se comportent comme
des sources secondaires qui diffusent la lumière provenant de S. Plaçons dèrrière le diaphragme
un écran vertical. On observe sur cet écran des zones alternativement éclairées et sombres. La
superposition des lumières provenant des deux fentes a donc produit sur l’écran des interfé-
rences lumineuses. Les zones éclairées font référence à une intrerférence constructive,
tandis que les zones sombres correspondent à une interférence destructive. Ce phénomène
d’interférnce traduit donc le caractère ondulatoire de la lumière. Les franges d’interférence
alternativement brillantes et sombres sur l’écran sont dites délocalisées car elles sont observées
en tout lieu où l’écran coupe le champ d’interférences, c’est-à-dire la région où les faisceaux
provenant des deux fentes se croisent.
Figure 11.2 – Expérience des fentes d’Young.
Soit a = F1F2 la distance qui sépare les fentes F1 et F2. Supposons que S appartienne à la
médiatrice du segment [F1F2]. Notons P le point d’intersection entre cette médiatrice et le dia-
phragme. Soit D la distance entre le diaphragme et l’écran. Notons Q le point d’intersection
entre la médiatrice précédente et l’écran. Soit M un point de l’écran tel que QM = x. Consi-
dérons un repère vertical (Qx) orienté vers le haut. Notons H1 et H2 les projetés orthogonaux
respectifs de F1 et F2 sur l’écran (Figure 11.3). On exprime la différence de marche δ du
point M par :
δ = SF2 − SF1 + F2M − F1M
Etant donné que S est situé sur la médiatrice du segment [F1F2], SF2 = SF1. Soit :
δ = F2M − F1M
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-591-320.jpg)














![CHAPITRE 11. OPTIQUE ONDULATOIRE ET CORPUSCULAIRE 595
Exercices
Exercice 11.1 :
A la Figure 11.13 ci-dessous, une source S émet une lumière monochromatique de longueur
d’onde λ = 500 nm. A une distance d = 1, 5 m de la source est placé un diaphragme vertical
percé de deux fentes F1 et F2 séparées par une distance a = F1F2 = 2 mm. A une distance
D = 2 m du diaphragme est placé un écran vertical. La médiatrice du segment [F1F2] coupe le
diaphraphme en un point P, et coupe l’écran en un point Q. La droite verticale qui passe par
la source S coupe la médiatrice précédente en un point O tel que OS = h = 3 mm. Soit M un
point de l’écran tel que QM = x. On note H le projeté orthogonal de S sur le diaphragme.
Figure 11.13 – Exercice 11.1.
1- Montrer que dans le cas où a, x et h sont négligeables devant d et D, la différence de marche
δ du point M peut s’exprimer selon la relation ci-dessous :
δ = a
h
d
+
x
D
‹
2- Déterminer l’abscisse x0 de la frange centrale.
3- Déterminer l’interfrange i.
4- En déduire la distance d35 entre les milieux de la troisième frange sombre et de la cinquième
frange brillante, situées de part et d’autre de la frange centrale.
Exercice 11.2 :
A la Figure 11.14, un diaphragme vertical est percé de deux fentes F1 et F2 séparées par une
distance a = F1F2 = 3 mm. Une source S de lumière monochromatique de longueur d’onde λ
est placée sur la médiatrice du segment [F1F2] qui coupe le diaphragmme en un point P. Soit
Q un point de cette médiatrice tel que PQ = D = 1, 5 m. Un écran droit incliné par rapport à
la verticale d’un angle α passe par le point Q. Soit M un point de l’écran tel que QM = x. On
note Q0
le projeté orthogonal de M sur la médiatrice du segment [F1F2].
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-606-320.jpg)
![CHAPITRE 11. OPTIQUE ONDULATOIRE ET CORPUSCULAIRE 596
Figure 11.14 – Exercice 11.2.
1- Montrer que dans le cas où a et x sont négligeables devant D, la différence de marche δ du
point M peut s’exprimer selon la relation ci-dessous :
δ =
ax cos α
D
2- Donner l’expression de l’interfrange i.
3- Calculer la valeur de i sachant que la distance entre les milieux de la sixième frange sombre
et de la septième frange brillante, situées de part et d’autre de la frange centrale sont séparés
par une distance d67 = 8 mm.
4- En déduire la valeur de λ.
Exercice 11.3 :
Une source ponctuelle S émettant une lumière monochromatique de longueur d’onde λ = 600 nm
éclaire un diaphragme vertical percé de deux petites fentes F1 et F2 séparées par une distance
a = F1F2 = 5 mm. Un écran vertical est placé à une distance D = 4 m du diaphragme. La
médiatrice du segment [F1F2] passe par le point S et coupe l’écran en un point Q. Deux lames
d’épaisseurs respectives e1 = 15 mm et e2 = 10 mm et d’indices de réfraction respectifs n1 = 1, 6
et n2 = 1, 5 sont placées respectivement derrière les fentes F1 et F2. Soit M un point de l’écran
tel que QM = x.
1- Donner l’expression de la différence de marche δ du point M.
2- Déterminer l’abscisse x0 de la frange centrale.
3- Calculer l’interfrange i.
4- Calculer la distance d16 séparant les mileux de la première frange sombre et de la sixième
frange centrale situées du même côté par rapport à la frange centrale.
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-607-320.jpg)
![CHAPITRE 11. OPTIQUE ONDULATOIRE ET CORPUSCULAIRE 597
Exercice 11.4 :
Une source de lumière dichromatique est composée de deux radiatons de longueurs d’onde res-
pectives λ1 = 450 nm et λ2 = 700 nm. La source éclaire un diaphragme vertical percé de deux
fentes F1 et F2 séparées par une distance a = 2 mm. La distance entre chaque fente et la source
S est la même. A une distance D = 3 m du diaphragme est placé un écran vertical. Soit un point
M d’abscisse x sur l’écran, l’axe des abscisses étant pointé vers le haut, et les abscisses étant
comptées à partir du point d’intersection entre la médiatrice du segment [F1F2] et l’écran. 1-
Calculer les interfranges i1 et i2 dues aux deux radiations.
2- Déterminer l’abscisse positive x0 où il y a coïncidence de frange brillante pour la première
fois sur l’écran.
Exercice 11.5 :
Une source ponctuelle S de lumière monochromatique de longueur d’onde λ éclaire un dia-
phragme vertical percé de deux fentes F1 et F2 séparées par une distance a = F1F2 = 4 mm.
Un écran vertical est placé à une distance D du diaphragme. Le point S appartient à la mé-
diatrice du segment [F1F2]. On observe sur l’écran des franges alternativement brillantes et
sombres. On fait varier les valeurs de D et on mesure à chaque fois la distance d entre la
dixième frange sombre et la dixième frange brillante situées de part et d’autre de la frange
centrale. Les données ont été consignées dans le Tableau 11.1 ci-dessous :
Tableau 11.1 – Exercice 11.5.
D (m) 1 1, 5 2 2, 5 3 3, 5 4 4, 5 5 5, 5
d (mm) 2, 7 4 5, 4 6, 7 8 9, 4 10, 7 12 13, 4 14, 7
1- Exprimer d en fonction de D.
2- Tracer le graphe d = f (D). Echelle : 1 cm −→ 0, 5 m en abscisse et 1 cm −→ 1, 25 mm en
ordonnée.
3- Déterminer une équation de la courbe obtenue.
4- En déduire la valeur de la longueur d’onde λ.
Exercice 11.6 :
Un avion vole dans les airs avec une vitesse constante en émettant un bruit de fréquence
N = 100 Hz. Un observateur immobile au sol perçoit le bruit avec une fréquence N0
= 57, 6 Hz.
On suppose que la vitesse du bruit dans l’air vaut V = 330 m.s−1
.
1- L’avion se rapproche-t-il ou s’élioigne-t-il de l’observateur ?
2- Calculer la vitesse V de l’avion.
Exercice 11.7 :
Une voiture est stationnée, le moteur étant en marche et émmetant une onde sonore de fréquence
N = 25 Hz qui se propage dans l’air à la vitesse V = 340 m.s−1
. Un enfant initialement placé à
une distance d = 500 m de la voiture court vers elle avec une cadence de pas régulière. Il atteint
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-608-320.jpg)







![CHAPITRE 11. OPTIQUE ONDULATOIRE ET CORPUSCULAIRE 607
4- La longueur d’onde λ a pour expression :
λ =
ia cos α
D
Application numérique :
λ =
640 × 10−6
× 3 × 10−3
× cos 60◦
1, 5
Soit :
λ = 640 nm
Exercice 11.3 :
1- La présence des lames rallonge la distance parcourue par la lumière. La différence de marche
δ du point M s’exprime donc par :
δ = F2M − F1M + e2 (n2 − 1) − e1 (n1 − 1)
Or, on sait que dans le cas où a et x sont négligeables devant D, on a :
F2M − F1M =
ax
D
D’où :
δ =
ax
D
+ e2 (n2 − 1) − e1 (n1 − 1)
2- La frange centrale est caractérisée par une différenc de marche nulle. Son abscisse x0 vérifie
donc la relation :
ax0
D
+ e2 (n2 − 1) − e1 (n1 − 1) = 0
D’où :
x0 =
D [e1 (n1 − 1) − e2 (n2 − 1)]
a
Application numérique :
x0 =
4 [0, 015 × (1, 6 − 1) − 0, 01 × (1, 5 − 1)]
5 × 10−3
Soit :
x0 = 3, 2 m
3- L’abscisse xkb
d’une frange brillante quelconque est telle que :
axkb
D
+ e2 (n2 − 1) − e1 (n1 − 1) = kbλ, kb ∈ Z
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-618-320.jpg)



















![CHAPITRE 11. OPTIQUE ONDULATOIRE ET CORPUSCULAIRE 627
=⇒ (N1 − N2) VV = V (N1 + N2 − 2N)
D’où :
VV =
V (N1 + N2 − 2N)
N1 − N2
Multiplions les équations du système précédent respectivement par N2 et −N1. On obtient :
N1N2VV − NN2VJ = V (N1N2 − NN2)
−N1N2VV + NN1VJ = V (N1N2 − NN1)
=⇒ N (N1 − N2) VJ = V (2N1N2 − NN1 − NN2)
D’où :
VJ =
V [2N1N2 − N (N1 + N2)]
N (N1 − N2)
Applications numériques :
VV =
345 × (53, 13 + 47, 3 − 2 × 50)
53, 13 − 47, 3
VJ =
345 × [2 × 53, 13 × 47, 3 − 50 × (53, 13 + 47, 3)]
50 × (53, 13 − 47, 3)
La voiture roule donc avec une vitesse VV = 25, 446 m.s−1
= 91, 6 km.h−1
, et le
joggeur court avec une vitesse VJ = 5, 441 m.s−1
.
Evaluation 11.3 :
La lumière étant violette, sa longueur d’onde vaut λ = 400 nm. La tension UCA qui annule la
vitesse des électrons à l’anode correspond au potentiel d’arrêt. On a donc la relation :
hC
1
λ
−
1
λs
‹
= eUCA
D’où :
λs =
1
1
λ
− eUCA
hC
Application numérique :
λs =
1
1
400×10−9 − 1,6×10−19×0,8
6,62×10−34×3×108
La longueur d’onde seuil de la cellule photoélectrique vaut donc λs = 538, 94 nm.
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-638-320.jpg)



![CHAPITRE 12. RADIOACTIVITÉ 632
12.4 Décroissance radioactive
Soit A
Z X un noyau radioactif qui se désintègre pour donner naissance à un autre noyau
A0
Z0 X0
. Considérons un échantillon radioactif contenant initialement (à la date t = 0) un nombre
N0 de noyaux de A
Z X. Ces noyaux vont se désintégrer progressivement et des noyaux de A0
Z0 X0
apparaîtront. Ainsi, le nombre de noyaux de A
Z X diminue tandis que le nombre de noyaux de
A0
Z0 X0
augmente de la même quantité. A une date quelconque t, notons NX (t) le nombre de
noyaux de A
Z X restants dans l’échantillon et NX0 (t) le nombre de noyaux de A0
Z0 X0
qui se sont
formés. NX0 (t) correspond encore au nombre de noyaux de A
Z X qui se sont désintégrés en A0
Z0 X0
.
La loi de la décroissance radioactive s’écrit :
NX (t) = N0 exp (−λt) (12.7)
On a également la relation :
NX0 (t) = N0 − NX (t) = N0 [1 − exp (−λt)] (12.8)
λ est la constante radioactive propre au noyau père A
Z X. Elle a la dimension de l’inverse d’un
temps et s’exprime en s−1
. On définit la période radioactive ou la demi-vie t1/2 comme le
temps au bout duquel la moitié des noyaux de A
Z X contenus initialement dans l’échantillon se
désintègrent. On a :
NX t1/2
= NX0 t1/2
=
N0
2
=⇒ exp −λt1/2
=
1
2
=⇒ −λt1/2 = ln
1
2
‹
= −ln 2
D’où :
t1/2 =
ln 2
λ
(12.9)
La demi-vie peut s’exprimer en années, en mois, en semaines, en jours, en heures, en minutes
ou en secondes. Soient mX (t) et mX0 (t) les masses respectives de A
Z X et A0
Z0 X0
dans l’échantillon
à une date t. m0 étant la masse initiale des noyaux de A
Z X contenus dans l’échantillon, on a les
relations :
mX (t) = m0 exp (−λt) (12.10)
mX0 (t) = m0 − mX (t) = m0 [1 − exp (−λt)] (12.11)
Les quantités de matière nX (t) et nX0 (t) de A
Z X et A0
Z0 X0
à la date t dans l’échantillon vérifient
les relations :
nX (t) =
mX (t)
MX
=
NX (t)
NA
(12.12)
nX0 (t) =
mX0 (t)
MX0
=
NX0 (t)
NA
(12.13)
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-643-320.jpg)

![CHAPITRE 12. RADIOACTIVITÉ 634
12.5 Interaction rayonnement-matière
Considérons une couche de matière qu’on éclaire par un rayonnement électromagnétique
constitué de photons. Notons N0 le nombre incident de photons à l’entrée de la couche. Au fur
et à mesure qu’on propgresse dans cette couche, certains photons interagissent avec la matière
et sont de ce fait atténués. Pour une épaisseur x de matériau, le nombre Nt (x) de photons
transmis sans atténuation et le nombre Na (x) de photons atténués s’expriment par :
Nt (x) = N0 exp (−µx) (12.15)
Na (x) = N0 − Nt (x) = N0 [1 − exp (−µx)] (12.16)
µ est le coefficient d’atténuation linéaire propre à la matière interagissant avec le rayon-
nement. Il dépend de l’énergie du rayonnement et du numéro atomique de la matière. Il a
la dimension de l’inverse d’une longueur. On l’exprime généralement en cm−1
. On définit le
coefficient d’atténuation massique µm comme le rapport entre le coefficient d’atténuation
linéaire et la masse volumique ρ de la matière :
µm =
µ
ρ
(12.17)
Les courbes d’évolution de Nt (x) et Na (x) ont été représentées à la Figure 12.3 ci-dessous.
Figure 12.3 – Courbes d’évolution de Nt (x) et Na (x).
x1/2 est la couche de demi-atténuation (CDA), définie comme l’épaisseur de la couche de
matière permettant à la moitié des photons incidents d’être transmis sans atténuation. On a :
x1/2 =
ln 2
µ
(12.18)
La CDA s’exprime généralement en cm ou en mm.
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-645-320.jpg)














![CHAPITRE 12. RADIOACTIVITÉ 649
la relation :
N1 = N0 exp (−λt1)
Application numérique :
N1 = 1030
× exp −9, 598 × 10−24
× 1015
× 365 × 24 × 3600
Soit :
N1 = 7, 388 × 1029
noyaux
L’activité A1 de l’échantillon au bout de t1 = 1015
ans. est donnée par :
A1 = λN1
Application numérique :
A1 = 9, 598 × 10−24
× 7, 388 × 1029
Soit :
A1 = 7, 091 × 106
Bq
5- Le nombre N2 de noyaux de Néodyme 144 désintégrés au bout de t2 = 1016
ans est donné
par la relation :
N2 = N0 [1 − exp (−λt2)]
Application numérique :
N2 = 1030
×
1 − exp −9, 598 × 10−24
× 1016
× 365 × 24 × 3600
Soit :
N2 = 9, 515 × 1029
noyaux
L’activité A2 de l’échantillon au bout de t2 = 1016
ans est donnée par :
A2 = λ (N0 − N2)
Application numérique :
A2 = 9, 598 × 10−24
× 1030
− 9, 515 × 1029
Soit :
A2 = 4, 652 × 105
Bq
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-660-320.jpg)

![CHAPITRE 12. RADIOACTIVITÉ 651
Soit t1 la date à laquelle il ne reste plus que 109
noyaux. On a donc :
t1 =
ln 1012
− ln 109
7, 6371 × 10−10
Donc, il reste 109
noyaux de Strontium 90 après 286, 815 ans.
4- Le nombre Nd de noyaux d’Yttrium 90 contenus dans l’échantillon à une date t s’exprime
par :
Nd = N0 [1 − exp (−λt)]
=⇒ 1 − exp (−λt) =
Nd
N0
=⇒ exp (−λt) =
N0 − Nd
N0
=⇒ −λt = ln
N0 − Nd
N0
‹
=⇒ t = −
ln
€
N0−Nd
N0
Š
λ
=
ln N0 − ln (N0 − Nd)
λ
Soit t2 la date à laquelle 1010
noyaux d’Yttrium 90 se sont formés. On a donc :
t2 =
ln 1012
− ln (1012
− 1011
)
7, 6371 × 10−10
Donc, 1011
noyaux d’d’Yttrium 90 se sont formés dans l’échantillon après 4, 37 ans.
Exercice 12.9 :
1- L’équation de la désintégration de l’Oxygène 15 en Azote 15 s’écrit :
15
8 O −→ 15
7 N + 0
1e
2- Le nombre initial N0 de noyaux contenus dans l’échantillon vérifie la relation :
N0
NA
=
m0
M
D’où :
N0 =
NAm0
M
Application numérique :
N0 =
6, 02 × 1023
× 12, 46 × 103
15
Soit :
N0 = 5 × 1026
noyaux
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-662-320.jpg)




![CHAPITRE 12. RADIOACTIVITÉ 656
Soit :
t1/2 = 1021
ans
3- Soit N0 le nombre de noyaux de Germanium 76 contenus initialement dans l’échantillon. Le
nombre Nr de noyaux restants à la date t1 = 1020
années s’exprime par :
Nr = N0 exp (−λt1)
=⇒
Nr
N0
= exp (−λt1) = exp −2, 197 × 10−29
s−1
× 1020
× 365 × 3600 × 24
Donc, après 1020
ans, il reste 93, 3% de noyaux de Germanium 76.
4- Le nombre Nd de noyaux de Germanium désintégrés à la date t2 = 1022
années s’exprime
par :
Nd = N0 [1 − exp (−λt2)]
=⇒
Nd
N0
= 1 − exp (−λt2) = 1 − exp −2, 197 × 10−29
s−1
× 1022
× 365 × 3600 × 24
Donc, après 1022
ans, 99, 9% de noyaux de Germanium se sont désintégrés.
Exercice 12.12 :
1- Soit A
Z X la particule émise lors de la désintégration radioactive du Thorium 231 en Protac-
tinium 231. L’équation de la désintégration s’écrit :
231
90Th −→ 231
91Pa + A
Z X
De la loi de conservation de Soddy, on a :
A + 231 = 231 et Z + 91 = 90
Soit :
A = 0 et Z = −1
La désintégration émet donc un électron et est par conséquent de type β−
. Son équation
s’écrit :
231
90 Th −→ 231
91 Pa + 0
−1e
2- L’activité A de l’échantillon à une date t s’exprime par :
A = A0exp (−λt)
=⇒ ln A = ln [A0exp (−λt)] = ln A0 + ln [exp (−λt)]
D’où :
ln A = −λt + ln A0
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-667-320.jpg)


![CHAPITRE 12. RADIOACTIVITÉ 659
Exercice 12.13 :
1- La couche de demi-atténuation x1/2 du Carbone est donnée par :
x1/2 =
ln 2
µ
Application numérique :
x1/2 =
ln 2
0, 335
Soit :
x1/2 = 20, 69 mm
2- Soit N0 le nombre de photons incident dans une couche de carbone. Le nombre Nt de photons
transmis sans atténuation sur l’épaisseur e1 = 5 cm de Carbone s’exprime par :
Nt = N0 exp (−µe1)
Soit :
Nt
N0
= exp (−µe1) = exp (−0, 335 × 5)
Donc, 18, 73% de photons sont transmis sans atténuation sur une épaisseur de 5 cm
de Carbone.
3- Le nombre Na de photons atténués sur l’épaisseur e2 = 10 cm de Carbone s’exprime par :
Na = N0 [1 − exp (−µe2)]
Soit :
Na
N0
= 1 − exp (−µe2) = 1 − exp (−0, 335 × 10)
Donc, 96, 49% de photons sont atténués sur une épaisseur de 10 cm de Carbone.
Exercice 12.14 :
1- Le coefficient d’atténuation linéaire µ de l’Aluminium vérifie la relation :
µm =
µ
ρAl
D’où :
µ = µmρAl
Application numérique :
µ = 8, 4 × 10−2
× 2, 7
Soit :
µ = 0, 2268 cm−1
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-670-320.jpg)
![CHAPITRE 12. RADIOACTIVITÉ 660
2- La couche de demi-atténuation x1/2 de l’Aluminium est donnée par :
x1/2 =
ln 2
µ
Application numérique :
x1/2 =
ln 2
0, 2268
Soit :
x1/2 = 30, 562 mm
3- Soit N0 le nombre de photons incident dans une couche d’Aluminium. Le nombre Nt de
photons transmis sans atténuation sur l’épaisseur e1 de Carbone s’exprime par :
Nt = N0 exp (−µe1)
=⇒ exp (−µe1) =
Nt
N0
=⇒ −µe1 = ln
Nt
N0
‹
=⇒ e1 = −
ln
€
Nt
N0
Š
µ
Si 80% de photons traversent la couche d’Aluminium sans atténuation, on a :
Nt
N0
= 80% = 0, 8
Soit :
e1 = −
ln 0, 8
0, 2268
D’où :
e1 = 9, 83 mm
4- Le nombre Na de photons atténués sur l’épaisseur e2 de Carbone s’exprime par :
Na = N0 [1 − exp (−µe2)]
=⇒ 1 − exp (−µe2) =
Na
N0
=⇒ exp (−µe2) = 1 −
Na
N0
=⇒ −µe2 = ln
1 −
Na
N0
‹
GLOIRE AU SEIGNEUR JÉSUS-CHRIST !](https://image.slidesharecdn.com/vjcphytlesc-231010222350-c995691d/85/l-Evangile-de-Jesus-Christ-par-la-Physique-Terminales-Series-scientifiques-671-320.jpg)