Le document traite des concepts fondamentaux de l'électrostatique et de la magnétostatique, incluant des lois telles que celle de Coulomb, les champs électrostatiques, et les équations de Laplace et de Poisson. Il présente également des exercices et des exemples appliqués pour illustrer ces théories. La structure est organisée par chapitres, chacun abordant un aspect spécifique de la physique électrique et magnétique.

![DANS LA COLLECTION BELIN SUP SCIENCES
J. BRUNEAUX, M. SAINT-JEAN et J. MATRICON
Électrostatique et magnétostatique, résumé de cours et exercices
A. MAUREL
Optique géométrique, cours
A. MAUREL, J.-M. MALBEC
Optique géométrique, résumé de cours et exercices
DANS LA COLLECTION BELIN SUP HISTOIRE DES SCIENCES
A. BARBEROUSSE
La mécanique statistique de Clausius à Gibbs
M. BLAY
La science du mouvement de Galilée à Lagrange
Le code de la propriété intellectuelle n’autorise que « les copies ou reproductions strictement réservées à l’usage privé du copiste et non desti-
nées à une utilisation collective » [article L. 122-5] ; il autorise également les courtes citations effectuées dans un but d’exemple ou d’illustra-
tion. En revanche « toute représentation ou reproduction intégrale ou partielle, sans le consentement de l’auteur ou de ses ayants droit ou
ayants cause, est illicite » [article L. 122-4].
La loi 95-4 du 3 janvier 1994 a confié au C.F.C. (Centre français de l’exploitation du droit de copie, 20, rue des Grands-Augustins, 75006
Paris), l’exclusivité de la gestion du droit de reprographie. Toute photocopie d’œuvres protégées, exécutée sans son accord préalable, constitue
une contrefaçon sanctionnée par les articles 425 et suivants du Code pénal.
© Éditions Belin, 2002 ISSN 1158-3762 ISBN 2-7011-3348-3
Photo de couverture:© Digital Vision
Illustrations et composition: Jean-Marc Dignac
Mise en pages: Publilog](https://image.slidesharecdn.com/electrostatiqueetmagntostatiquepdfdrive-220809144328-46cdce93/85/Electrostatique-et-magnetostatique-PDFDrive-pdf-2-320.jpg)





































































































































![“doc” — 2002/9/17 — 15:42 — page 144 — #142
i
i
i
i
i
i
i
i
Un peu d´histoire
Biot et Savart
Biot et Savart n’étaient pas « ampériens »
mais soutenaient qu’il fallait plutôt tout
ramener à la loi de Coulomb et aux fluides
magnétiques. La bataille faisait rage entre
les deux points de vue. Pour eux, « les effets
électrodynamiques ne sont que la consé-
quence secondaire d’une véritable aimanta-
tion imprimée par le courant électrique aux
conducteurs métalliques constituant les cir-
cuits [...] les courants voltaïques circulant
autour des molécules [...] entraînent une
complication d’arrangements et de suppo-
sitions si grande qu’elle en devient presque
inexprimable ». À l’inverse, Ampère consi-
dérait que « l’action qui émane de courants
voltaïques ne peut être due à une distribu-
tion particulière de certains fluides au repos
dans les conducteurs ».
Orientation du champ magnétique et symétrie des distributions de courants
Nous avons étudié en détail au chapitre 3, l’influence de la symétrie des distributions de
charges sur l’orientation du champ électrique. Dans ce paragraphe, nous analyserons de
même l’influence de la symétrie des distributions de courants sur l’orientation du champ
magnétique qu’elles créent.
Considérons tout d’abord les éléments de symétrie nous permettant de réduire le
nombre de variables pertinentes nécessaires pour décrire les variations des différentes
composantes du champ
B. Prenons l’exemple d’un fil infini parallèle à l’axe Oz parcouru
par un courant constant. Ce fil étant infini, la distribution de courant est invariante par
translation le long de l’axe Oz et les composantes de
B ne dépendront pas de la variable z.
De même, l’invariance du système par rotation autour de l’axe Oz nous permet d’affirmer
que, en coordonnées cylindriques, elles ne dépendront pas non plus de l’angle u. Le
champ magnétique créé par un tel fil ne pourra varier qu’avec la distance au fil. Le même
type de raisonnement peut être effectué dans le cas d’une spire dont l’axe Oz est l’axe
de révolution. Ce système est invariant par rotation autour de Oz, le champ magnétique
ne dépendra pas lui non plus de l’angle u. Sur ces deux exemples, nous retrouvons les
mêmes arguments que ceux utilisés pour réduire le nombre de variables nécessaires à la
description du champ électrique créé par une distribution de charges électriques. Nous
pourrons les étendre à toutes les distributions de courants.
Examinons maintenant les arguments qui permettent d’identifier les composantes du
champ magnétique qui sont nulles par symétrie. Comme dans le cas du champ électrique,
nous allons commencer par définir des plans de symétrie et d’antisymétrie magnétique.
Il est toutefois nécessaire de souligner que les conclusions auxquelles nous arriverons
sont radicalement différentes de celles obtenues dans le cas du champ électrique (à la
différence du champ électrique qui du point de vue mathématique est un vecteur, le
champ magnétique est un pseudo-vecteur). Considérons par exemple deux fils rectilignes
infinis et parallèles A et B. Supposons tout d’abord que ces deux fils soient parcourus par
des courants identiques orientés dans le même sens (fig. 9.6).
144](https://image.slidesharecdn.com/electrostatiqueetmagntostatiquepdfdrive-220809144328-46cdce93/85/Electrostatique-et-magnetostatique-PDFDrive-pdf-145-320.jpg)





























![“doc” — 2002/9/17 — 15:42 — page 176 — #174
i
i
i
i
i
i
i
i
Comment peut-on comprendre qualitativement ces différents phénomènes ? Dans
l’expérience 1, l’apparition du courant dans un circuit soumis à un champ constant est
due à la déformation du circuit ; dans l’expérience 2, seule la variation d’intensité du champ
magnétique crée un courant dans le circuit indéformable ; enfin, dans l’expérience 3, alors
que le circuit est indéformable et le champ constant, l’apparition du courant est liée à
l’inhomogénéité du champ. Ces trois expériences, réalisées par Faraday, lui suggérèrent
que le « moteur » des électrons dans le circuit n’était pas à chercher dans les variations de
la forme du circuit ou du champ magnétique, mais dans celles d’une grandeur qui lie ces
deux paramètres : le flux du champ magnétique à travers le circuit.
Un peu d´histoire
L’induction
À partir des expériences qu’il réalisa durant
l’automne 1831, Faraday imagina le phé-
nomène d’induction comme étant lié au
fait que des lignes de champ traversent les
conducteurs du circuit dans lequel passe le
courant induit ; il reconnut que ces phéno-
mènes obéissent « à une loi très simple,
quoique assez difficile à exprimer : ils
dépendent de la façon dont le conducteur
coupe les courbes magnétiques [...] j’en-
tends les lignes de force qui seraient tracées
par la limaille de fer. » (d’après R. Taton, La
science contemporaine, PUF).
11.2. Force électromagnétique induite et courant
induit
1 Force électromotrice et courant induit
Pour décrire commodément ses expériences, Faraday introduisit une grandeur E, qu’il
appela force électro-motrice (f.e.m.) ayant la dimension d’une différence de potentiel.
Cette « force » est associée au courant induit I par la relation E 5 RI, où R est la
résistance du circuit.
En analysant le sens et l’intensité du courant induit dans le circuit, toutes ces expé-
riences peuvent être comprises en liant la force électromotrice E à la variation instantanée
du flux magnétique F à travers toute surface orientée s’appuyant sur le circuit. On obtient
la relation fondamentale de l’induction :
E 5 −
dF
dt
(11.1)
Un circuit électrique est orienté par le sens du courant que l’on considère convention-
nellement comme positif ; la surface s’appuyant sur ce circuit est alors orientée suivant
la règle du « bonhomme d’Ampère ». Suivant cette règle, l’orientation de la surface est
donnée par la direction indiquée par « le bras gauche d’un bonhomme qui regarde le
centre du circuit tandis que le courant conventionnel lui rentre par les pieds et lui sort par
la tête ».
176](https://image.slidesharecdn.com/electrostatiqueetmagntostatiquepdfdrive-220809144328-46cdce93/85/Electrostatique-et-magnetostatique-PDFDrive-pdf-177-320.jpg)















































![“doc” — 2002/9/17 — 15:42 — page 228 — #226
i
i
i
i
i
i
i
i
1 Un « câble coaxial » est formé de deux
cylindres coaxiaux creux sans épaisseur de
rayons a et b, séparés par un diélectrique de
permittivité relative ´r. Des courants de mêmes
intensités mais de sens opposés circulent dans les
deux cylindres.
a. Calculer le coefficient d’auto-induction L par
unité de longueur du câble, à partir de l’énergie
électrique emmagasinée dans le câble.
b. En admettant que les surfaces en regard
portent des charges 1l et −l par unité de lon-
gueur, calculer la capacité G par unité de lon-
gueur de ce câble à partir de l’énergie magné-
tique emmagasinée dans le câble.
c. Exprimer le produit LG ; quelle est sa dimen-
sion ?
2 [Force exercée par un champ magnétique
inhomogène]
a. Utiliser l’expression de l’énergie potentielle
d’un dipôle magnétique
m dans un champ
magnétique
B pour calculer les composantes de
la force subie par ce dipôle si le champ est inho-
mogène.
b. En déduire l’expression de la force subie par un
volume élémentaire de matière magnétique, de
susceptibilité xm, dans un champ inhomogène.
Un petit cylindre allongé est placé entre les pôles
tronconiques d’un électroaimant et peut pivo-
ter librement autour d’un axe perpendiculaire à
l’axe des pôles et passant par son milieu. Discu-
ter la position d’équilibre du barreau selon que le
matériau dont est constitué le cylindre est dia ou
paramagnétique. Que se passe-t-il si les pièces
polaires sont planes ?
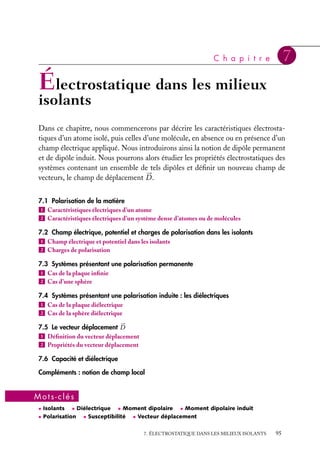
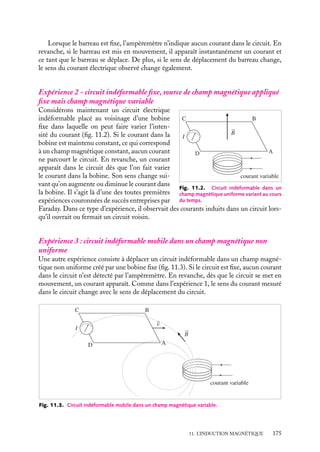
3 Deux solénoïdes coaxiaux a et b longs et fins
(leurs longueurs la et lb sont grandes devant leurs
rayons) sont parcourus par les courants Ia et lb
circulant dans le même sens et sont emboîtés l’un
dans l’autre d’une longueur l (figure ci-dessous).
Pour simplifier, on suppose qu’ils ont presque
même rayon r et on néglige les effets de bord.
a. Donner les coefficients de self induction La
et Lb, et la mutuelle Mab si les deux solénoïdes
ont respectivement n
a et n spires par unité de
longueur.
b. Donner l’énergie magnétique du système et
sa variation si on déplace l’un des solénoïdes par
rapport à l’autre de dl, en maintenant constants
les courants Ia et Ib. Expliquer pourquoi on doit
fournir de l’énergie pour maintenir constants ces
courants et calculer le travail que doivent fournir
les sources Sa et Sb. En déduire le travail méca-
nique fourni par la force d’interaction Fab entre
les solénoïdes. Cette force d’interaction est-elle
attractive ou répulsive ?
c. Retrouver cette force à partir de l’expression
dWm 5 1
2m0
B2 dt.
d. On déplace maintenant de dl l’un des solé-
noïdes par rapport à l’autre, en maintenant
constants les flux. Calculer le travail fourni par
les sources Sa et Sb pour maintenir constants ces
flux. En déduire le signe de la variation d’énergie
magnétique au cours du déplacement.
lb
la
l
Deux solénoïdes emboîtés.
228](https://image.slidesharecdn.com/electrostatiqueetmagntostatiquepdfdrive-220809144328-46cdce93/85/Electrostatique-et-magnetostatique-PDFDrive-pdf-229-320.jpg)













































































































