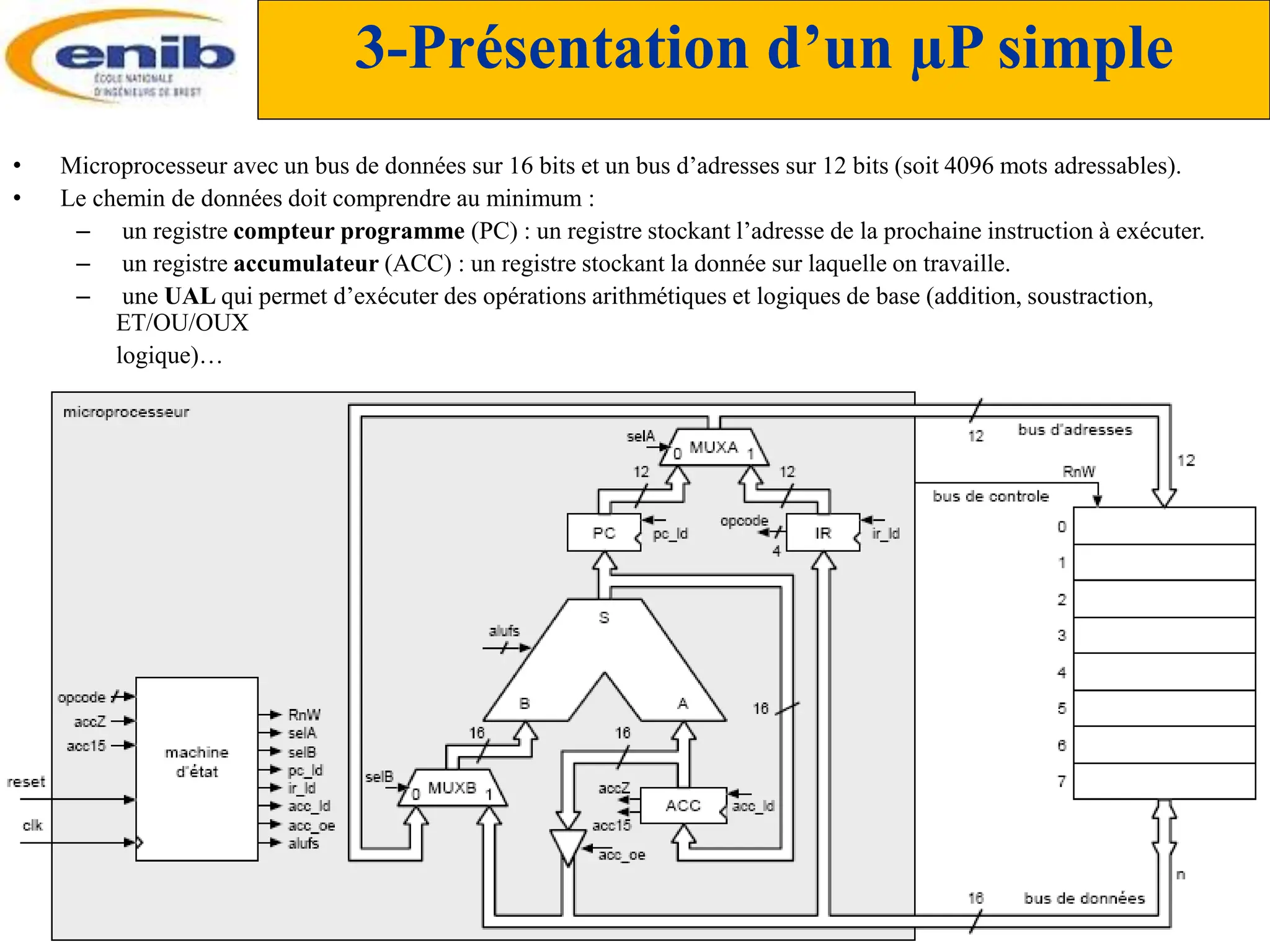
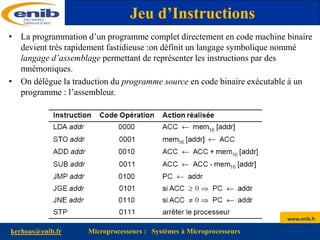
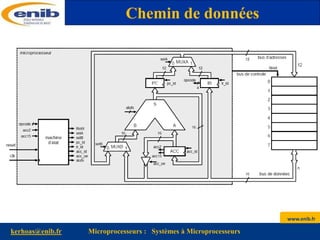
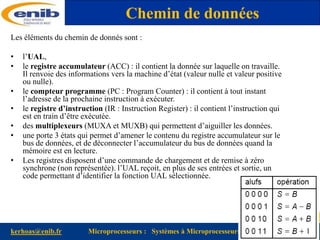
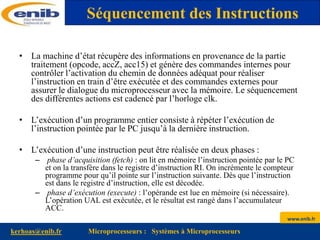
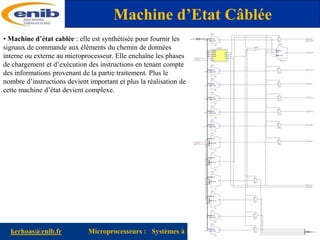
Le document présente les composants et le fonctionnement d'un microprocesseur simple, incluant le chemin de données, les instructions, et le séquencement des opérations. Il décrit également la machine d'état microprogrammée et les différents modes d'adressage pour les instructions. Enfin, il aborde les différences entre les architectures CISC et RISC et leurs implications sur l'exécution des programmes.
![www.enib.fr
kerhoas@enib.fr Microprocesseurs : Systèmes à Microprocesseurs
2
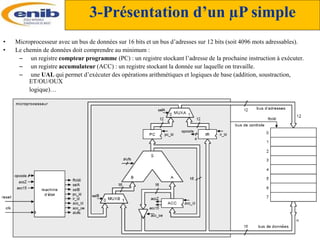
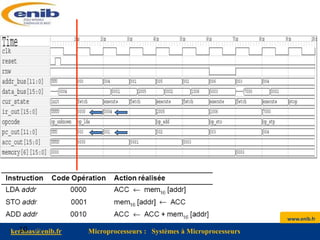
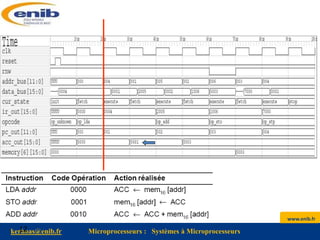
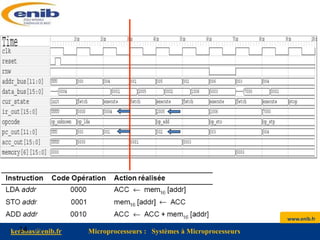
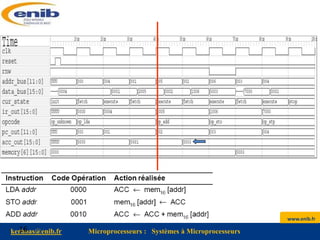
• Chaque instruction est codée sur
16 bits et comprend :
– le champ code opération :
indique le type d’instruction dont
il s’agit (add, …).
– le champ code opérande :
adresse de la donnée.
• Une instruction d’addition, par
exemple, utilise la donnée stockée
à l’adresse spécifiée, ainsi que le
registre accumulateur comme
opérande implicite, puis stocke le
résultat dans l’accumulateur.
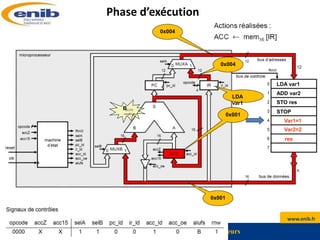
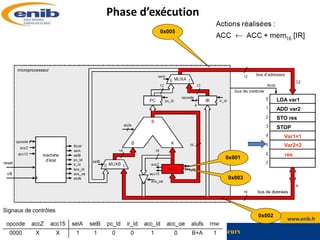
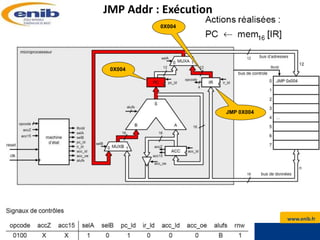
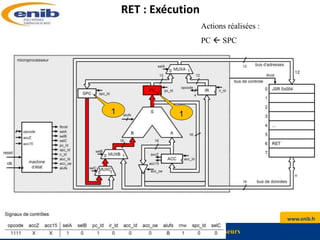
L’action réalisée est :
ACC ¬ ACC + mem16 [addr].
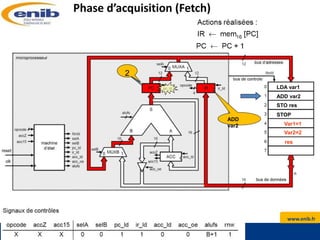
On parle de machine une adresse
car une seule opérande est définie
explicitement dans le codage de
l’instruction. Les instructions sont
lues depuis la mémoire à partir de
l’adresse 0, à des adresses
consécutives.
Codage des Instructions](https://image.slidesharecdn.com/chapitre1-240130101646-5f2e9aaa/85/Chapitre1-ppt-2-320.jpg)
![www.enib.fr
kerhoas@enib.fr Microprocesseurs : Systèmes à Microprocesseurs
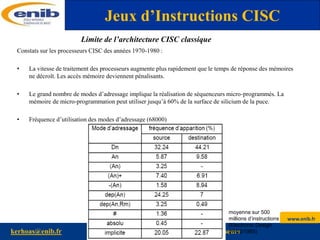
Application : accès aux champs d’un tableau d’enregistrement en C
struct individu {
short int taille;
short int poids;
short int age;
} equipe[5] ;
equipe[2].taille=170;
equipe[2].poids=60;
equipe[2].age=20;
TAILLE EQU 0
POIDS EQU 2
AGE EQU 4
EQUIPE DS.W 3*5 * tableau
LEA.L EQUIPE, A0 * Adresse de base
MOVE.L #12, D1 * Index (2*6 octets)
MOVE.W #170, TAILLE(A0, D1.L)
MOVE.W #60, POIDS(A0, D1.L)
MOVE.W #20, AGE(A0, D1.L)
31 16 15 0
A0 00 03 1F FC
31 16 15 0
D1 00 00 00 0C
$31FFC $31FFD
@++↓ $31FFE $31FFF
$32000 $32001
$32002 $32003
$32004 $32005
$32006 $32007
$32008 $00 $AA $32009
$3200A $00 $3C $3200B
$3200C $00 $14 $3200C
Jeux d’Instructions CISC](https://image.slidesharecdn.com/chapitre1-240130101646-5f2e9aaa/85/Chapitre1-ppt-35-320.jpg)