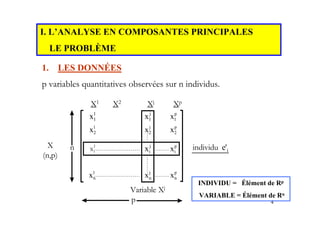
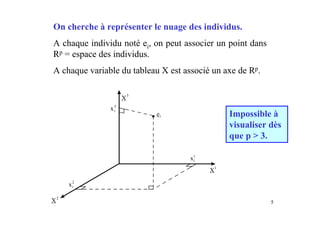
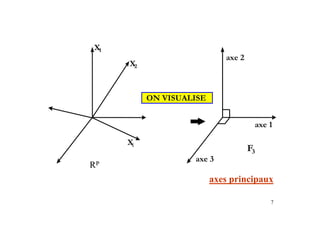
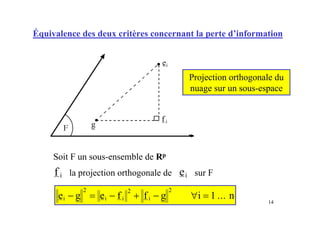
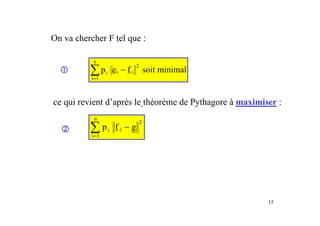
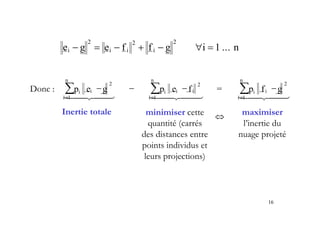
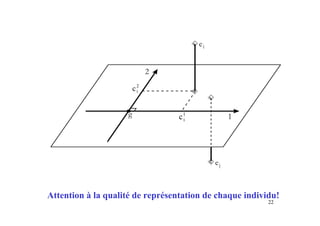
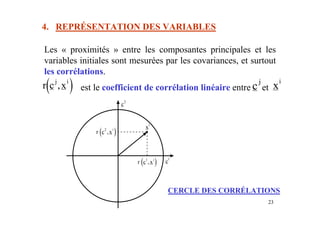
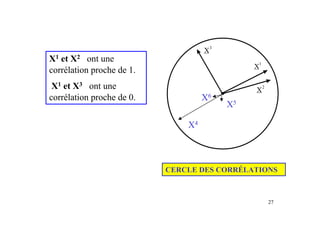
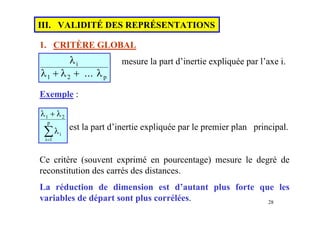
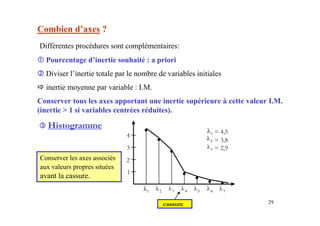
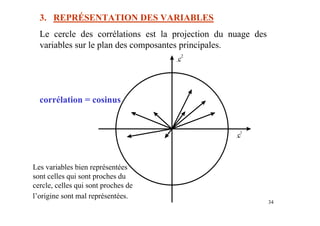
L'analyse en composantes principales (ACP) est une méthode statistique utilisée pour explorer les relations entre des variables quantitatives observées sur des individus, en réduisant la dimensionnalité tout en préservant un maximum d'information. Elle repose sur la construction de nouvelles variables appelées composantes principales, qui sont des combinaisons linéaires des variables originales, et permet de visualiser à la fois les individus et les variables sur des axes principaux en maximisant l'inertie. Les résultats incluent également des critères pour évaluer la qualité des représentations et des interprétations des relations entre variables.