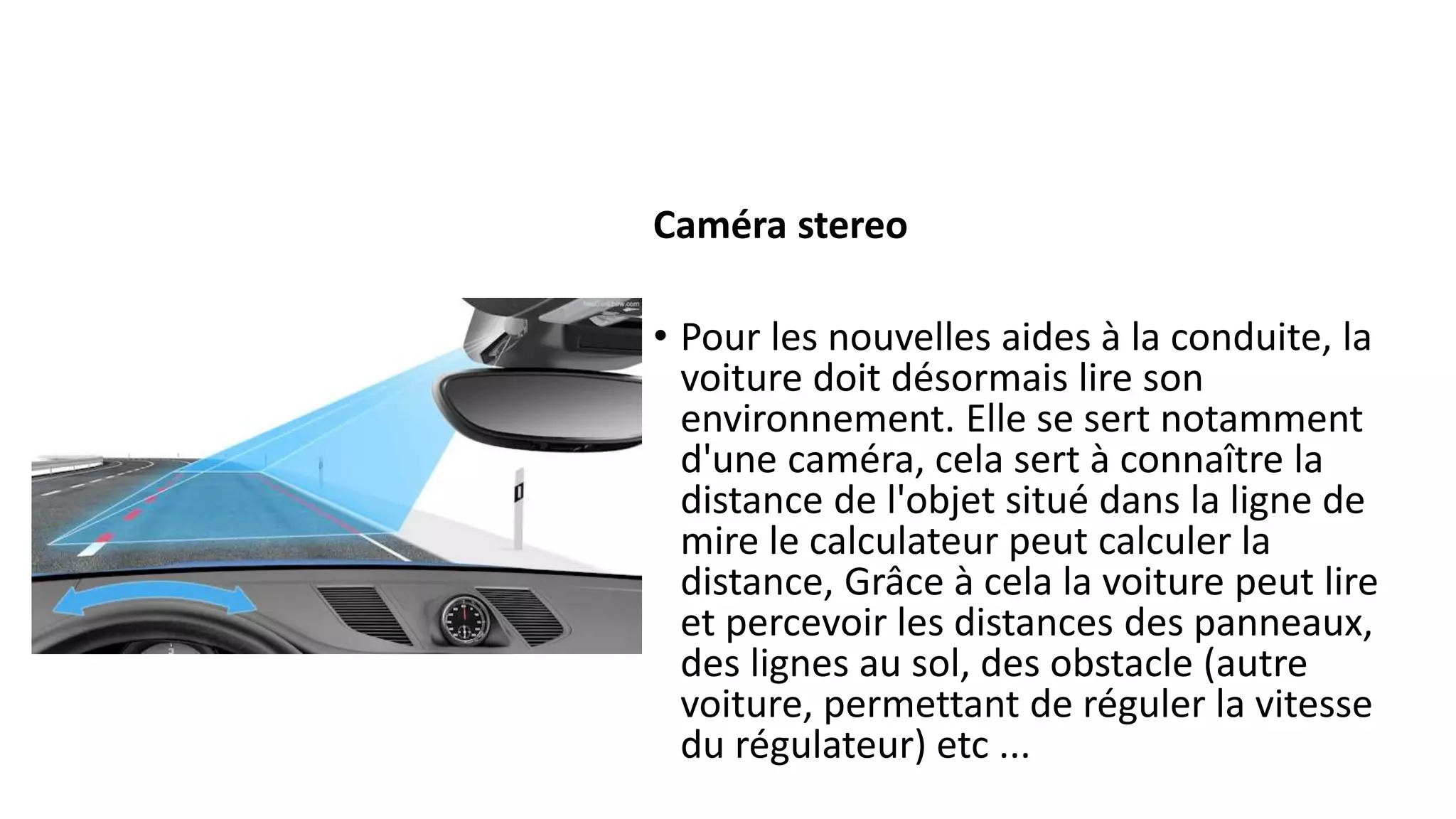
Le document décrit divers capteurs et systèmes utilisés dans les voitures modernes pour améliorer la sécurité et la performance de la conduite, notamment des caméras, des radars, des capteurs de position et de pression. Ces dispositifs permettent au calculateur de percevoir et d'interagir avec l'environnement, régulant ainsi la vitesse, l'accélération et d'autres paramètres critiques. Les capteurs jouent un rôle essentiel dans la gestion des systèmes de sécurité tels que l'ABS, l'ESP et d'autres aides à la conduite.





















![LES CAPTEURS [Enregistrement automatique].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/lescapteursenregistrementautomatique-250926153941-0389b15a-thumbnail.jpg?width=640&height=640&fit=bounds)





















![cours raspberry [Enregistrement automatique].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/coursraspberryenregistrementautomatique-260206145736-b1015531-thumbnail.jpg?width=640&height=640&fit=bounds)

