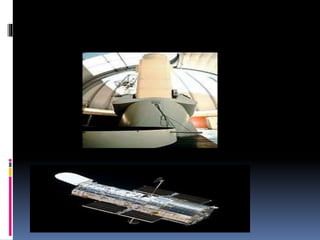
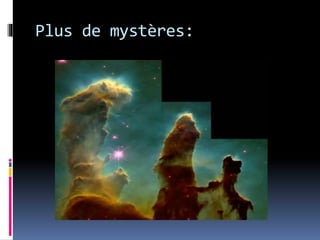
Le document décrit le fonctionnement et le traitement des images du télescope spatial Hubble, spécialisé dans l'observation des objets éloignés de l'univers. Il aborde les types de télescopes, les techniques de prise de vue, et les processus de traitement des données pour obtenir des images de haute qualité. Hubble, grâce à son emplacement au-delà de l'atmosphère terrestre, a révolutionné l'astronomie avec des images précises et très détaillées.






























































![cours raspberry [Enregistrement automatique].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/coursraspberryenregistrementautomatique-260206145736-b1015531-thumbnail.jpg?width=640&height=640&fit=bounds)
