Téléchargé 444 fois

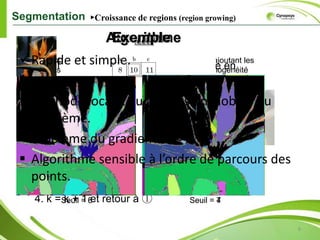
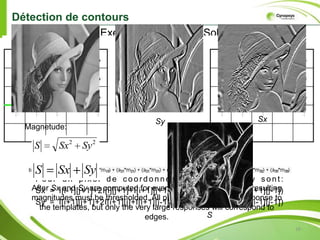



![Détection de contours16Exemple: Masque de SobelLe masque de Sobel mesure le gradient d’une image 2D.Typiquement, il est utiliser pour trouver une approximation du gradient en tout point d’une image au niveaux de gris.Une paire de masques à convolution, l’un estimant le gradient suivant l’axe-x, et l’autre selon l’axe-y.SxSyMagnetude:Pour un pixel de coordonnées (i,j), Sx et Sy sont:Sx = I[i-1][j+1]+2I[i][j+1]+I[i+1][j+1]-(I[i-1][j-1]+2I[i][j-1]+I[i+1][j-1])Sy = I[i+1][j+1]+2I[i+1][j]+I[i+1][j-1]-(I[i-1][j+1]+2I[i-1][j]+I[i-1][j-1])AfterSx and Sy are computed for every pixel in an image, the resulting magnitudes must bethresholded. All pixels will have someresponse to the templates, but only the very large responseswill correspond to edges.S](https://image.slidesharecdn.com/formationtraitementdimages-110623035334-phpapp01/85/Formation-traitement-d_images-25-320.jpg)

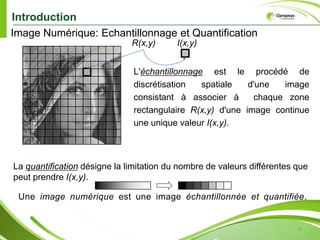
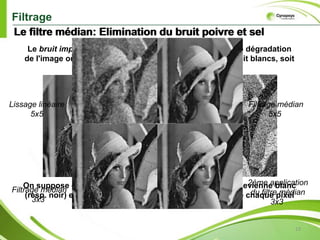
Le document présente les concepts fondamentaux du traitement d'images, notamment l'échantillonnage, la quantification, la segmentation, la détection de contours et le filtrage. Diverses méthodes de segmentation sont discutées, telles que l'utilisation d'histogrammes et d'algorithmes de croissance de régions, ainsi que des techniques de détection de contours comme le filtre de Sobel. En outre, il aborde les techniques de filtrage linéaires et non linéaires, illustrées par l'utilisation de filtres médian pour l'élimination du bruit.




















![Comprendre l’intelligence artificielle [webinaire]](https://cdn.slidesharecdn.com/ss_thumbnails/technologiawebinaireintelligenceartificielleclaudemarson01042019-190403213713-thumbnail.jpg?width=640&height=640&fit=bounds)














































