Téléchargé 1 681 fois















































![Robot à base d’Android
Un Smartphone Android (Huawei GAGA)
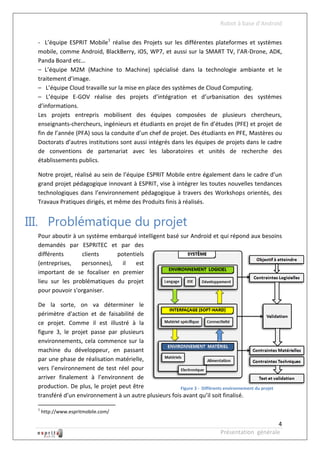
La première chose indispensable à avoir pour construire ce ROBOT, est un Smartphone,
sur lequel il y aura l’OS Android qui sera notre milieu d’exploitation et de développement
de l’application qui va gérer tout le ROBOT, aussi on va exploiter tous les autres
composants du Smartphone comme suit :
o La carte WIFI jouera le rôle de connectivité sans fil du ROBOT
o La connectique Bluetooth, sera un autre moyen exploitable pour se connecter
au ROBOT
o La carte d’acquisition GSM + puce : nous les exploitant en envoyant les SMS
d’alerte à n’importe que numéro, on peut aussi avoir la possibilité d’appeler
ou d’envoyer des commandes SMS pour commander le ROBOT
o La carte 3G : on peut connecter le ROBOT à Internet directement, on doit ainsi
penser au temps de latence, et la bande passante
o L’écran : il servira d’interface pour afficher des notifications visuelles, ou autre
informations
o Microphone : Le ROBOT sera capable d’écouter son entourage, enregistrer est
diffuser, on peut avoir un ROBOT détecteur de son, ou même un ROBOT qui
réagit à des commandes vocales.
o Haut-parleur : il servira comme une sortie sonore du ROBOT, un tas de
possibilités existe
o L’accéléromètre : nous l’utilisant dans la récupération de l’orientation du
ROBOT dans l’espace
o La Boussole : servira à indiquer l’orientation selon le Nord du ROBOT
o GPS : est nécessaire pour avoir la localisation de notre ROBOT
o La carte SD/le stockage interne : servira énormément pour la sauvegarde des
données volumineuses comme les photos, vidéos, son et toute autre
information générée ou traitée par le ROBOT
Nous avons choisi d’utiliser le Huawei GAGA, il tourne sous Android 2.2, il comporte
toutes les spécifications requises pour le projet ainsi qu’il possède deux avantages
majeures, le poids et les dimensions sont les plus faibles, aussi le prix il est le moins cher
du marché (environ 199 DT soit 130 $) – [voir annexe pour les spécifications techniques
complètes]
Figure 47 - Huawei Gaga
49
Réalisation](https://image.slidesharecdn.com/pferapportandroidbasedrobotfinal-120715191243-phpapp01/85/ROBOT-a-base-d-Android-Rapport-PFE-60-320.jpg)









![Robot à base d’Android
BIBLIOGRAPHIE
1. Mike Lockwood, Erik Gilling, Jeff Brown. Google I/O 2011: Android Open Accessory API
and Development Kit (ADK). Youtube.com. [Online] 05 11, 2011. [Cited: 01 01, 2012.]
http://www.youtube.com/watch?v=s7szcpXf2rE.
2. TSVI, Ytai Ben. Profil Google+. Plus.Google.com. [En ligne] [Citation : 15 04 2012.]
https://plus.google.com/113760481226159480550/about.
3. FELLER, SAM. An Interview with Ytai Ben-Tsvi, Inventor of the IOIO. Engineer Blogs.
[Online] 03 21, 2012. [Cited: 03 24, 2012.] http://engineerblogs.org/2012/03/an-interview-
with-ytai-ben-tsvi-inventor-of-the-ioio/.
4. Site officiel ARDUINO. Arduino.cc. [En ligne] [Citation : 03 01 2012.] http://arduino.cc/.
5. Google. Android Open Accessory Development Kit. Developer.android.com. [En ligne]
[Citation : 01 04 2012.]
http://developer.android.com/guide/topics/connectivity/usb/adk.html.
6. First Sketch. Arduino.cc. [En ligne] [Citation : 15 02 2012.]
http://arduino.cc/en/Tutorial/Sketch.
7. Two steps communication protocol. arduino.cc. [En ligne] [Citation : 19 02 2012.]
http://www.arduino.cc/cgi-bin/yabb2/YaBB.pl?num=1292733514.
8. Tsvi, Ytai Ben. Github ytai / ioio. Github.com. [En ligne] https://github.com/ytai/ioio.
9. —. The IOIO Manager ApplicationNew Page Edit Page Page History. Github.com. [En ligne]
https://github.com/ytai/ioio/wiki/The-IOIO-Manager-Application.
10. Android Software and IOIO Application Firmware Images. github.com. [En ligne]
https://github.com/ytai/ioio/wiki/Downloads.
11. Rota, Véronique Messager. Gestion de projet agile avec Scrum, Lean, eXtreme
Programming... 3e édition. s.l. : Eyrolles.
61
Bibliographie](https://image.slidesharecdn.com/pferapportandroidbasedrobotfinal-120715191243-phpapp01/85/ROBOT-a-base-d-Android-Rapport-PFE-72-320.jpg)


















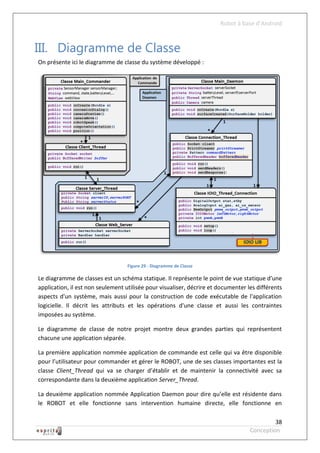
Ce rapport présente le projet de conception et de réalisation d'un robot à base d'Android, réalisé dans le cadre du projet de fin d'études pour l'obtention d'un diplôme d'ingénieur en télécommunications. Le robot est conçu pour explorer divers environnements, détecter des obstacles et des fuites de gaz, tout en assurant la sécurité dans les secteurs industriels. Le document aborde également la méthodologie de développement, les spécifications des besoins et les défis rencontrés lors de la réalisation du projet.



































































