Télécharger en tant que PDF, PPTX






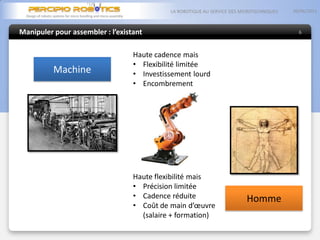


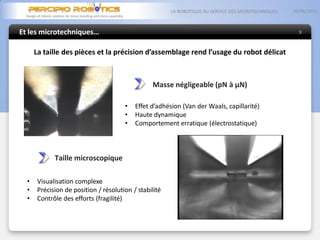
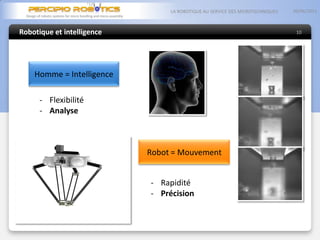



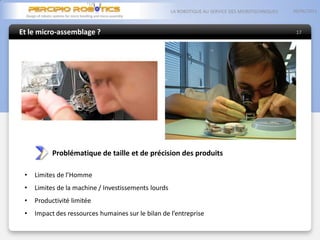









Le document présente l'intégration de la robotique, en particulier la cobotique, dans l'assemblage de haute précision dans le domaine des microtechniques. Il souligne les défis liés à la taille et à la précision des pièces, tout en explorant les avantages de la collaboration homme-robot pour améliorer la productivité et la qualité. La nouvelle approche vise à allier flexibilité, compacité et répétabilité pour répondre aux besoins de micro-assemblage.















































