

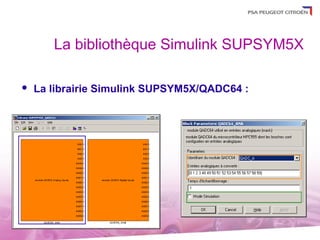
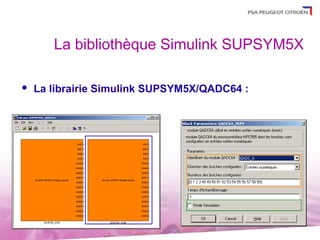
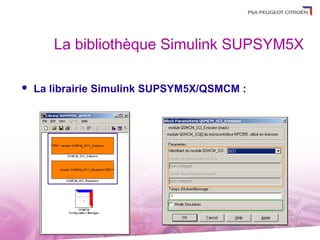
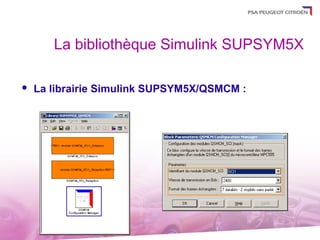
![La bibliothèque Simulink SUPSYM5X
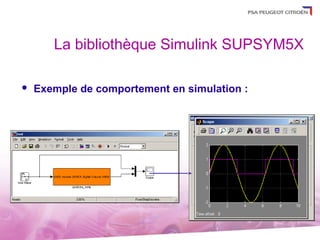
Exemple de comportement en génération automatique
de code :
Mise à jour des fonctions module
Déclaration des sorties du du module
Initialisation du module QADC64
QADC64
logiciel
/* Implémentation de(s) S-Fonction : <Root>/QADC64_NUM */
de la S-Fonction(s) de la librairie SUPSYM5X_QADC64 */
UINT8 listeBroche_0[1];
static UINT8 data = 0;
#include "h_QADC.h"
static STATUS erreur_initDigitalOutput_QADCA = 0;
/* Implémentation de(s) S-Fonction : <Root>/QADC64_NUM */ la librairie
de la S-Fonction(s) du type QADC64_NUM de
/* Mécanisme de seuillage */
SUPSYM5X_QADC64 S-Fonction : <Root>/QADC64_NUM */
Implémentation de la */
listeBroche_0[0] = AN58;
if(test_Input.Input_1 > 0)
extern STATUS B_QADC_InitDigitalInput(PTRModule, UINT8, PTRUINT8);
erreur_initDigitalOutput_QADCA = B_QADC_InitDigitalOutput(&QADC_A, 1,
extern STATUS B_QADC_InitDigitalOutput(PTRModule, UINT8, PTRUINT8);
data = 1;
elselisteBroche_0);
extern STATUS B_QADC_WritePin(PTRModule, UINT8, UINT8);
extern UINT8 B_QADC_ReadPin(PTRModule, UINT8);
data = 0;
erreur_sendDigitalValue_QADCA = B_QADC_WritePin(&QADC_A, AN58,
data);](https://image.slidesharecdn.com/soutenance-psa-130115023714-phpapp01/85/PFE-PSA-Peugeot-Citroen-Prototypage-rapide-11-320.jpg)
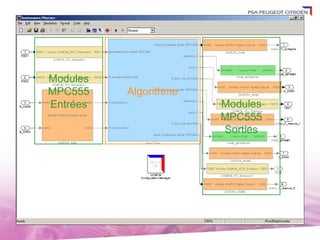
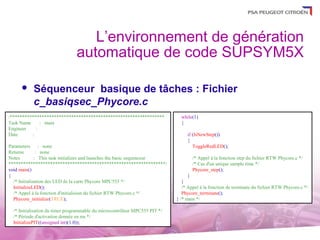


Le projet se concentre sur la spécification, la conception et la validation de modules logiciels et de blocs Simulink pour le microcontrôleur MPC555, visant à créer un support de prototypage pour des systèmes mécatroniques. Il inclut une bibliothèque de blocs Simulink et un environnement de génération automatique de code C dédié, optimisé pour ce microcontrôleur. Les limites de ce projet incluent la compatibilité restreinte avec certaines versions de Simulink et des difficultés d'évolutivité.















































