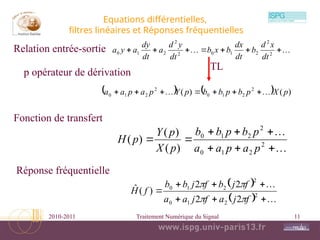
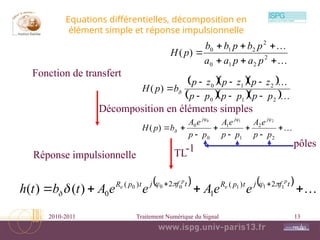
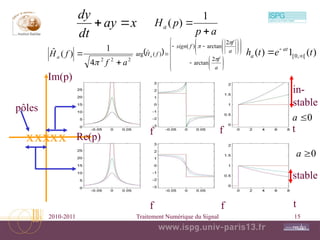
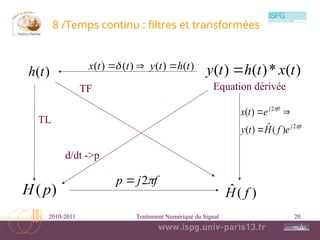
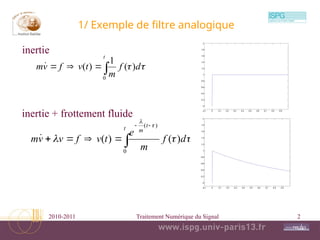
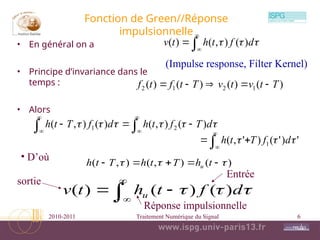
Le document aborde divers concepts fondamentaux du traitement numérique du signal, incluant les filtres analogiques, la convolution, la transformée de Laplace, et les propriétés des systèmes invariants. Il traite également des concepts avancés tels que la réponse impulsionnelle, les filtres linéaires, et la relation entrée-sortie. Enfin, le texte mentionne la stabilité des filtres et les caractéristiques de minimum de phase.






(
)
(
)
](
[
)
(
)
](
[ p
Y
p
X
f
t
y
t
x
TL
p
aS
f
t
as
TL
f
j
p
j
f
j
p
j
f
t
f
TF
f
j
p
f
j
p
f
t
f
TL
p
p
t
TL
p
t
TL R
R
R
2
1
2
1
2
1
2
1
)
](
1
)
2
[sin(
2
1
2
1
2
1
2
1
)
](
1
)
2
[cos(
1
1
1
)
)](
(
[ 0
0
)
(
)
(
)
(
1
)
(
0
p
pS
p
s
d
d
TL
p
S
p
p
d
s
TL
t
t
)
(
)
( ap
aS
p
a
t
s
TL
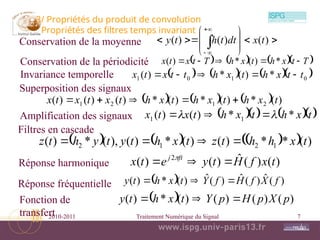
Retard=>déphasage
Linéarité
Dilatation/concentration
Intégration/dérivation
Produit de convolution/produit
Sinusoïdes=>hyperboles](https://image.slidesharecdn.com/tns20101f-250203100132-ce5c4d36/85/systeme-lineaire-invariant-continue-ppt-9-320.jpg)
![2010-2011 Traitement Numérique du Signal 10
5/ Filtrage
)
(
)
( t
t
h
)
(
*
)
(
)
(
)
(
)
(
)
(
)
( t
u
t
t
t
y
t
t
u
t
y
)
(
1 [
,
0
[ t
)
(
*
)
(
)
(
1
)
(
)
(
)
(
)
( [
,
0
[
0
t
u
t
t
t
z
d
t
u
t
z
t
t
f
j
t
f
j
e
f
H
t
e 0
0 2
0
2 ˆ
)
(
)
(
ˆ
)
(
ˆ
)
(
ˆ
)
(
)
(
)
( f
U
f
H
f
Y
t
t
u
t
y
[
,
]
t
]
[
)
( h
TL
p
H
Réponse impulsionnelle
Réponse indicielle
Réponse harmonique ou réponse fréquentielle
Fonction de transfert
)
(
)
(
)
(
)
(
)
(
)
( p
U
p
H
p
Y
t
t
u
t
y
)
(
ˆ f
h
TF
f
H ](https://image.slidesharecdn.com/tns20101f-250203100132-ce5c4d36/85/systeme-lineaire-invariant-continue-ppt-10-320.jpg)