Ce document présente une étude sur l'utilisation du système GNSS pour analyser les déformations du pont de Québec, réalisées entre juillet 2012 et juillet 2013. Les résultats montrent que des facteurs comme les passages de trains et les conditions météorologiques influencent les mouvements de la travée centrale, avec des affaissements mesurés jusqu'à 17 cm. Les mesures de déformation sont généralement conformes aux prédictions faites lors de la construction du pont en 1907.










![xi
Liste des tableaux
Tableau 1.1 : Bilan des diverses solutions adoptées pour les tests comparatifs des quatre
semaines tests...........................................................................................................................10
Tableau 2.1 : Comparaison des constellations GPS et GLONASS [Santerre, 2013]. .............17
Tableau 2.2 : Comparaison entre les systèmes GPS et GLONASS [Rossbach, 2001]............18
Tableau 2.3 : Constantes géodésiques et paramètres des ellipsoïdes.......................................20
Tableau 2.4 : Précision des coordonnées des satellites GLONASS [ICD-GLONASS, 2008].
..................................................................................................................................................23
Tableau 2.5 : Produits précis d’orbites et corrections d’erreurs d’horloge des satellites GPS de
l’IGS.........................................................................................................................................24
Tableau 2.6 : Produits précis d’orbites et corrections d’erreurs d’horloge des satellites
GLONASS de l’IGS. ...............................................................................................................24
Tableau 2.7 : Bilan des erreurs GNSS. ....................................................................................32
Tableau 3.1 : Caractéristiques du pont de Québec [DRC, 1908a]...........................................40
Tableau 3.2 : Poids et coût d'entretien du pont de Québec......................................................40
Tableau 3.3 : Vent transversal et son effet prédit sur le déplacement transversal du pont......44
Tableau 4.1 : Dimensions du réseau d'auscultation topographique du pont de Québec..........49
Tableau 4.2 : Informations techniques des antennes et des récepteurs utilisés pour
l'auscultation topographique du pont de Québec. ....................................................................52
Tableau 4.3 : Coordonnées obtenues par PPP (solution GNSS-L1&L2 en mode absolu
statique) pour la station de référence QBC2 suivant les quatre semaines choisies avec les
précisions, RMS des résiduelles, le délai troposphérique et leur précision, le nombre
d’observations traitées et la température moyenne par jour. La valeur entre les crochets est la
précision de la moyenne hebdomadaire...................................................................................54
Tableau 4.4 : Coordonnées obtenues par PPP (solution GPS-L1&L2 en mode absolu statique)
pour la station de référence PEPS suivant les quatre semaines choisies avec les précisions,
RMS des résiduelles, le délai troposphérique et leur précision, le nombre d’observations
traitées et la température moyenne par jour. La valeur entre les crochets est la précision de la
moyenne hebdomadaire. ..........................................................................................................55
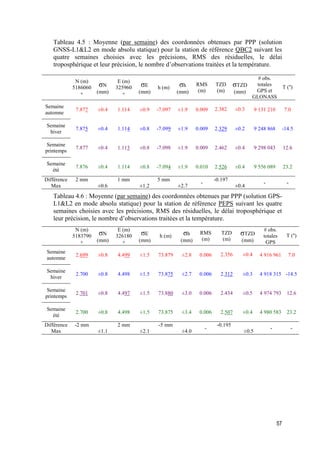
Tableau 4.5 : Moyenne (par semaine) des coordonnées obtenues par PPP (solution GNSS-
L1&L2 en mode absolu statique) pour la station de référence QBC2 suivant les quatre
semaines choisies avec les précisions, RMS des résiduelles, le délai troposphérique et leur
précision, le nombre d’observations traitées et la température................................................57
Tableau 4.6 : Moyenne (par semaine) des coordonnées obtenues par PPP (solution GPS-
L1&L2 en mode absolu statique) pour la station de référence PEPS suivant les quatre](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-11-320.jpg)
![xiii
Liste des figures
Figure 1.1 : Marémètres permanents du Service hydrographique du Canada et modèle
hydrodynamique développé par la Garde côtière canadienne. ..................................................3
Figure 1.2 : Diagramme d'activité pour l'auscultation topographique du pont de Québec........9
Figure 2.1 : Évolution de la précision des orbites finales de l'IGS [IGS, 2013]......................22
Figure 2.2 : Séparation entre le centre de masse et le centre de phase du satellite [Héroux &
Kouba, 2001]............................................................................................................................27
Figure 2.3 : Variation de centre de phase d'une antenne [Hofmann-Wellenhof et al, 2001]...28
Figure 2.4 : Traitement PPP combiné GPS et GLONASS. .....................................................36
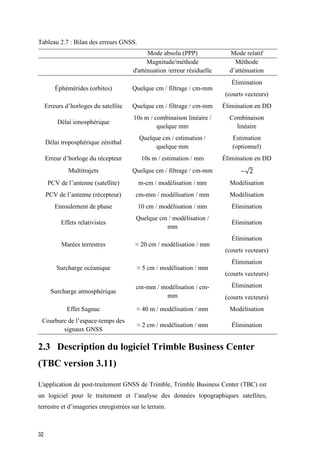
Figure 3.1 : Modèle 3D du pont de Québec.............................................................................38
Figure 3.2 : Dimensions du pont de Québec............................................................................39
Figure 3.3 : Piliers et poutres principaux du pont de Québec..................................................41
Figure 3.4 : Document d’origine des dimensions, des poids des différentes composantes et
d’autres quantités du pont de Québec. .....................................................................................41
Figure 3.5 : Données générales du pont de Québec et comparaison avec le pont Forth.........42
Figure 3.6 : Déformation de la travée centrale causée par un chargement de 7441 kg/m plus
une charge supplémentaire de 45360 kg à la poutre 8 et 9 (milieu de la travée suspendue)
[DRC, 1908b]...........................................................................................................................43
Figure 3.7 : Plan d’origine des déformations maximales causées par la température et le vent
[DRC, 1908b]...........................................................................................................................44
Figure 4.1 : Réseau d'auscultation GNSS du pont de Québec. ................................................48
Figure 4.2 : Profil du réseau d'auscultation topographique du pont de Québec. .....................49
Figure 4.3 : Station de référence QBC2...................................................................................50
Figure 4.4 : Station de référence PEPS....................................................................................51
Figure 4.5 : Emplacement de l’antenne fixée sur le pont de Québec. .....................................52
Figure 5.1 : Repère global (noir) et repère local (rouge) du pont de Québec. .........................67
Figure 5.2 : Antenne du pont de Québec avec son repère local...............................................68
Figure 5.3 : RMS des résiduelles en mètres (solution statique). À gauche, une comparaison
entre les trois solutions (TBC-GNSS-L1-QBC2, TBC-GNSS-L1&L2-QBC2 et PPP-GNSS-
L1&L2), au centre, une comparaison entre (TBC-GPS-L1-QBC2 et TBC-GPS-L1&L2-
QBC2) et à droite, une comparaison des valeurs PDOP (GNSS vs GPS) pour les 4 semaines
tests. .........................................................................................................................................70
Figure 5.4 : Comparaison entre les précisions horizontales et verticales (en mètres) des
coordonnées du pont (PtQc) obtenues en mode statique par les trois solutions (TBC-GNSS-](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-13-320.jpg)



![1
Chapitre 1 - Introduction
La mesure de haute précision est un outil très important pour les travaux d’auscultation
d’ouvrages de génie civil tels que les ponts, les barrages, les tours de télécommunication
et les gratte-ciel.
Ces structures d’ingénierie sont constamment en mouvement sous l’action de
différentes contraintes qui s’exercent sur elles. Ces contraintes peuvent être la pression
de l’eau, l’action des glaces et la température pour les barrages; et pour les ponts, les
passages des trains et des automobiles et les changements météorologiques comme la
variation de la température et la force du vent. L’étude des déformations et l’évaluation
de ces grandeurs sont très importantes pour éviter les dangers, pour minimiser les
risques et pour prendre les décisions qui s’imposent.
Au cours de la dernière décennie, le système GNSS est devenu un outil important pour
les applications géodésiques de haute précision, en particulier pour la recherche en
géodynamique et pour l’auscultation topographique [Santerre, 2011]. À cette fin,
plusieurs fabricants ont développé des récepteurs et antennes spéciaux qui sont conçus
pour fournir une gamme de mesures de précision centimétrique, voire millimétrique.
Ces mesures de précision sont fort utiles pour l’étude des déformations comme le pont
de Québec.
Ce chapitre présente une introduction générale du thème du présent projet de maîtrise
ainsi qu’une description du contexte général du projet dans la section 1.1. Un survol des
recherches antérieures qui ont inspiré cette et une formulation de problème qui encadre
cette recherche se retrouvent dans les sections 1.2 et 1.3. L’objectif de ce projet ainsi
que les hypothèses proposées à la solution des problèmes sont discutés dans les
sections 1.4 et 1.5. Finalement, un diagramme d’activité qui résume toutes les étapes du
travail avec une stratégie générale de cette recherche se retrouvent dans les
sections 1.6, 1.7. Le contenu du mémoire est décrit à la section 1.8.
1.1. Description du contexte général
Le problème de hauteur libre sous les ponts et la sécurité des grands navires (comme les
porte-conteneurs et les navires de croisières) soulève une question importante : est-ce](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-23-320.jpg)
![3
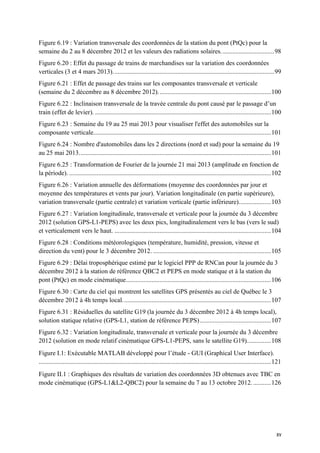
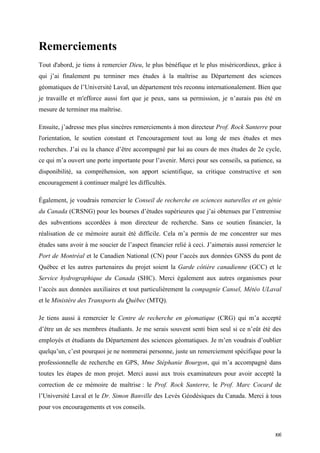
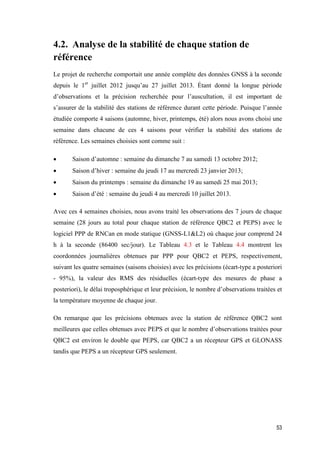
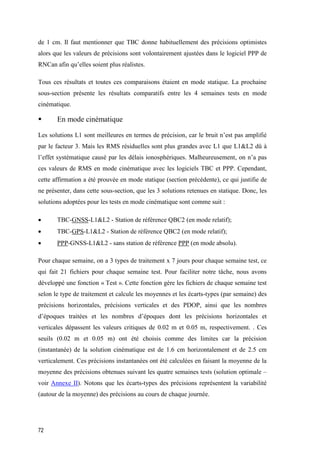
pont en fonction des paramètres mentionnés ci-dessus, tout en analysant la précision des
diverses solutions GNSS.
Figure 1.1 : Marémètres permanents du Service hydrographique du Canada et modèle
hydrodynamique développé par la Garde côtière canadienne1
.
1.2. Recherches antérieures
Les travaux d’auscultation topographique d’ouvrages d’ingénierie avec GPS (GNSS) en
temps continu se sont développés avec le déploiement complet des constellations GPS
et GLONASS ainsi qu’avec l’amélioration des performances des récepteurs et des
antennes nouvellement fabriqués. Les prochains paragraphes résument quelques
recherches portant sur l’utilisation du système GPS (GNSS) pour l’auscultation
topographique des structures d’ingénierie.
Lamoureux [1998] présentent le développement d’une méthodologie complète pour
l’auscultation topographique du pont suspendu Pierre-Laporte (ville de Québec) à l’aide
du système GPS. Cette méthodologie comporte le développement des modèles
mathématiques et des algorithmes codés dans un logiciel de traitement GPS adapté à ce
genre de projet. Le réseau d’auscultation comportait 2 stations de référence et 3 points
d’auscultation sur le pont situés au centre du tablier et aux sommets de chacune des
1
http://ogsl.ca/ocean/](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-25-320.jpg)
![4
tours (ou pylônes). Trois sessions d’observations de 48 heures (aux 2 secondes) ont été
faites. De plus une station météorologique temporaire a été établie au niveau du tablier
pour mesurer la température, l’humidité relative et la direction du vent. Également, les
informations provenant des boucles de détection du trafic étaient disponibles.
L’auteur a démontré la viabilité de l’utilisation du système GPS pour ce genre d’étude
de structure d’ingénierie. La corrélation entre les déplacements transversaux instantanés
et la force du vent, de même que la corrélation entre les déplacements verticaux et les
variations de température viennent prouver cette affirmation.
Nakamura [2000] a proposé une nouvelle méthode en utilisant le système GPS
permettant de mesurer directement les déplacements des poutres d’un pont suspendu au
Japon induits par la force des vents. Les mesures sur le terrain ont été effectuées,
pendant la saison de forts vents, sur un pont suspendu qui a une travée principale de 720
m et de deux travées secondaires de 330 m de longueur. Les déplacements semi-
statiques des poutres ont été obtenus avec succès, et sont cohérents avec les valeurs
prédites numériquement et les résultats des tests en soufflerie. Les densités spectrales
des déplacements mesurés par GPS correspondaient avec les résultats numériques par
l'analyse en éléments finis.
L’auteur mentionne que la réponse des poutres aux rafales de vent a été évaluée à partir
des enregistrements d’accéléromètres et comparée aux données GPS. Les fréquences de
mode des deux techniques ont montré un bon accord dans la plage des basses
fréquences et les pics spectraux estimés par les accéléromètres correspondaient aux
valeurs obtenues du GPS. Il a conclu que la méthode GPS est fiable et utile pour étudier
les comportements de réponse semi-statique causée par les rafales de vent.
Raziq et al [2007] décrivent les résultats d'une étude GPS du pont West Gate à
Melbourne, Victoria, Australie qui est un pont à haubans en acier poutre-caisson. La
travée principale de la rivière est de 336 mètres de longueur et la hauteur au-dessus de
l'eau est de 58 mètres. La longueur totale du pont est de 2 583 mètres. Les informations
de fréquence dérivées des résultats GPS sont également comparées aux données de
fréquence extraites à partir d'un accéléromètre installé à proximité d'un récepteur GPS.
Les résultats GPS correspondent étroitement à l’historique des résultats et des essais de
l'accéléromètre pour les principales fréquences modales. Ce qui prouve l'utilité des](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-26-320.jpg)
![5
récepteurs GPS pour surveiller les structures d'ingénierie qui présentent même de faibles
mouvements en raison de la rigidité de la structure.
Meng et al [2009] ont étudié l’utilisation du système GNSS pour l’auscultation
topographique de quatre ponts, dont le pont Tsing Ma à Hong Kong, en Chine, qui est le
sixième plus long pont suspendu au monde et le plus long pont suspendu à travée
unique qui porte à la fois le trafic routier et ferroviaire. Dans ce projet, il y avait neuf
différents types de capteurs dont des anémomètres, des thermomètres, des
accéléromètres, des capteurs de pesage (dynamic weigh-in-motion sensors), des niveaux
électroniques, des capteurs de déplacement, des jauges de contrainte, des caméras de
surveillance et des récepteurs GNSS, pour un total de 848 capteurs sur le pont Tsing Ma
et les deux autres ponts à haubans adjacents.
La technologie GNSS a été introduite en raison de son efficacité et la précision des
mesures. Un total de 29 récepteurs GNSS bi-fréquence de type géodésique de haute
qualité ont été utilisés dans cette étude. Les données GNSS ont été collectées à un taux
d'échantillonnage de 10 Hz de façon continue, et des fibres optiques ont été utilisées
pour transmettre les résultats de positionnement de chaque station de surveillance à un
centre de traitement pour de plus amples analyses. Les résultats ont révélé, entre autre,
une forte relation entre la position verticale du pont et la température ambiante.
Le deuxième pont étudié par la même équipe est le pont Akashi Kaikyo au Japon qui est
le plus long pont suspendu routier au monde. Ce pont a été ausculté avec le système
GNSS. Les données du vent et de la température ont également été recueillies
simultanément. Les séries temporelles des déplacements sur six mois ont été analysées
avec la variation du vent et de la température. Les fonctions de régression établies
pourraient être utilisées pour repérer les futures déviations anormales après de fortes
charges de vent ou des tremblements de terre.
Yi et al [2010] exposent l’utilisation du système GPS (GNSS) pour l’auscultation du
pont Humber au Royaume-Uni. Sa longueur est de 1410 m et sa première fréquence
propre dans la direction verticale est d'environ 0.116 Hz. Selon les auteurs, l'utilisation
d'un GPS (GNSS) en mode cinématique a permis d’atteindre une précision de quelques
centimètres avec un taux d’échantillonnage allant jusqu'à 20 Hz.](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-27-320.jpg)
![6
Kaloop et al. [2013] ont décrit les déplacements de l’auscultation topographique du pont
Mansoura en Égypte avec la méthode des composantes principales d’ondelettes
(Wavelets) et l’analyse de spectre basé sur des mesures GPS. Les auteurs concluent que
l’analyse des composantes principales d’ondelettes (WPCA) peut être utilisée pour
éliminer les erreurs des mesures GPS et que le spectre en trois dimensions donne de
l’'informations riche pour la réponse dynamique du pont et que les déformations et
l'expansion (mouvement de l'articulation) du pont de Mansoura sous les charges
actuelles respectent les normes de construction.
1.3. Formulation du problème
Les déformations des structures d’ingénierie dépendent essentiellement du type de
contraintes qui s’exercent sur celles-ci. Pour un pont, le changement de la température
de l’acier entre le jour et la nuit et entre l’hiver et l’été engendre une déformation
longitudinale et verticale de périodicité journalière et saisonnière. Les valeurs des
températures accessibles pour notre étude étaient celles de l’air et non celles de l’acier
qui sont différentes. Les déformations causées par les radiations solaires (rayonnements
diffusés par le Soleil et qui sont mesurés au sol à chaque deux heures) déforment aussi
la travée suspendue transversalement entre chaque lever et coucher du Soleil. La force
des vents provoque des déformations transversales en fonction de la direction et de la
vitesse de ceux-ci. Des déformations verticales sont aussi provoquées par les passages
des trains et des automobiles.
Généralement, pour détecter et évaluer ces déformations fines, des stations (récepteurs
géodésiques GNSS multi fréquences) sont installées aux endroits critiques de la
structure. Ces emplacements doivent être choisis de manière rigoureuse.
Dans notre cas, puisque le radar a été fixé au bord inférieur (côté amont) de la travée
centrale dans le but de valider le modèle hydrodynamique, il est important d’installer le
récepteur GNSS dans le même axe vertical que le radar (afin de pouvoir corriger
efficacement les mesures du radar pour tenir compte du mouvement du pont). Pour cela
l’antenne GNSS a été fixée au milieu et au sommet (évitant du même coup toutes
obstructions) de la travée suspendue du côté amont.](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-28-320.jpg)
![7
Les précisions recherchées dans le domaine des déformations de structures d’ingénierie
doivent être de précision centimétrique ou mieux. D’après [Santerre & Lamoureux,
1997], les précisions GPS dans le cas du pont Pierre Laporte étaient de l’ordre 5 mm
horizontalement et 1 cm verticalement pour une solution de navigation sans cumul et
lorsque le PDOP était inférieur à 6, en utilisant une station de référence à environ 1 km
et avec une faible dénivelée. Puisque l’amplitude des déformations des ponts peut
atteindre plusieurs centimètres (voir décimètres) alors ces précisions sont acceptables.
Avec le développement et l’amélioration de la qualité des systèmes de positionnement
GPS puis GLONASS, le système GNSS (GPS/GLONASS) ou GPS individuel devient
un outil fort utile pour les travaux d’auscultation topographique, étant donné les
constellations présentes des satellites (32 GPS et 24 GLONASS) qui permettent le
positionnement tridimensionnel 24 heures par jour partout sur la planète. D’autres
avantages à l’utilisation du système GNSS ou GPS sont que celui-ci est indépendant des
conditions météorologiques, que la visibilité entre les deux sites d’observations n’est
pas requise. Ainsi il est possible d’établir un réseau d’auscultation dont les stations
seraient munies d’antennes GNSS ou GPS permettant en mode relatif l’étude du
mouvement de ces stations de manière continue, et ce, même en temps réel.
Avant de formuler la problématique, il faut rappeler que le principe de base du
positionnement par satellite basé sur le concept de la trilatération spatiale avec
l’estimation de paramètres d’horloge du récepteur. L'observation des signaux provenant
des satellites permet de mesurer la distance entre le point d'observation et chacun des
satellites observés. Connaissant la position de chaque satellite dans l'espace, on peut
calculer la position du point d'observation. Les erreurs affectant la précision du
positionnement par méthodes GNSS sont liées :
à la géométrie des satellites utilisés (PDOP);
aux erreurs affectant la mesure de distance entre les différents satellites et le
récepteur de l’utilisateur.
Les observations GNSS (GPS) sont entachées d'erreurs systématiques et aléatoires. Les
plus importantes sont :
L’effet de l’erreur d’orbite;
L’effet de l’erreur d’horloge du satellite et les biais électroniques du satellite;](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-29-320.jpg)




![17
f n1 = f 01 + n*Δf1 = 1602 + n*(9/16) MHz
f n2 = f 02 + n*Δf2= 1246 + n*(7/16) MHz
(2.1)
n= -7, -6 . . ., 12 sont les numéros de canaux de fréquences
f 01 = 1602 MHz est la fréquence L1 relative au canal numéro 0
Δf1= 9/16 MHz est l’incrément de fréquence L1 entre deux canaux successifs
f 02 = 1246 MHz est la fréquence L2 relative au canal numéro 0
Δf2= 7/16 MHz est l’incrément de fréquence L2 entre deux canaux successifs4
.
Comparaison GPS et GLONASS
Le Tableau 2.1 présente une comparaison entre les constellations GPS et GLONASS,
les deux systèmes que nous avons utilisés dans notre recherche. Les autres systèmes
sont encore en développement (Galileo pour l’Europe et Beidou pour la Chine) et ne
sont pas inclus dans cette étude.
Tableau 2.1 : Comparaison des constellations GPS et GLONASS [Santerre, 2013].
GPS GLONASS
Nombre satellite (2015) 32 24
Nombre plan orbital 6 3
Plan d’inclinaison 55° 66°
Altitude (km) 20180 19100
Période orbitale 11h 58 m 11 h 16 m
Vitesse orbitale (m/s) 3870 3950
Station de contrôle maîtresse 1+1 (réserve) 1
Station de poursuite 18 7
Les comparaisons entre GPS et GLONASS sont résumées dans le Tableau 2.2 en termes
des caractéristiques des signaux et des référentiels.
4
http://igscb.jpl.nasa.gov/components/formats.html](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-39-320.jpg)
![18
Tableau 2.2 : Comparaison entre les systèmes GPS et GLONASS [Rossbach, 2001].
GPS GLONASS
Caractéristiques du
signal
Type de
modulation
CDMA FDMA
Fréquence du code
(MHZ)
C/A code : 1.023
P code : 10.23
C/A code : 0.511
P code : 5.11
Éphémérides
diffusées
Éléments de
Kepler et
variations
temporelles
Position, vitesse,
accélération
Référentiels
Système de
référence
WGS-84 PZ-90.11
Échelle de temps
GPST
UTC(USNO)
GLONASST
UTC(SU)
2.1.2. Échelles de temps
L’UTC est calculé à partir des données de 230 horloges atomiques dans 60 laboratoires
mondiaux [BIPM, 2013]. L’UTC (USNO) et UTC (SU) sont deux UTC locales. L'UTC
(SU) est maintenue par un ensemble de masers à hydrogène comme l'une des échelles
de temps atomique les plus stables dans le monde. Sa différence à l'UTC est de l'ordre
de quelques microsecondes. L’écart entre UTC (USNO) et UTC (SU) est aussi de
quelques microsecondes. Cet écart temporel est tenu en compte pour une combinaison
GPS/GLONASS en estimant 2 paramètres d’horloge du récepteur par rapport à chacune
des échelles de temps.
Temps GPS
Le temps du système GPS, mis à jour par la station de commande principale GPS,
commence le 6 janvier 1980. Habituellement, le temps du système GPS a une différence
de moins de 100 ns avec l'UTC (USNO) tenue par l’Observatoire Naval des États-Unis
et a une différence avec UTC de 16 secondes (GPS - UTC = 16s depuis le 1/7/2012 et
ce, jusqu’au 30/6/2015). Les utilisateurs GPS obtiennent cette différence à partir de l’un
des paramètres dans le message de navigation GPS [Rossbach, 2001].](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-40-320.jpg)
![19
Temps GLONASS
La différence entre le temps de GLONASS et le temps UTC (SU) est inférieure à 1
milliseconde. L'échelle de temps GLONASS est périodiquement corrigée par un nombre
entier de secondes simultanément avec les corrections UTC.
Transformation entre les échelles de temps
GPS et GLONASS sont deux systèmes de positionnement dont chacun a une échelle de
temps indépendante reliée à différentes réalisations de l'UTC (temps universel
coordonné). Par conséquent, la transformation du temps de GLONASS au GPS et vice
versa ne peut pas être effectuée facilement. Malgré cela, cette différence entre les deux
échelles de temps doit être prise en compte lors de la transformation du temps entre les
deux systèmes pour l’intégration GPS/GLONASS combinée.
2.1.3. Systèmes de coordonnées
Système de coordonnées GPS
Le système géodésique mondial 1984 (WGS-84) est adopté comme système de
référence pour le système GPS [ICD-GPS, 2011]. Le cadre de référence est défini
comme suit :
L’origine est le centre de masse de la Terre;
L'axe Z est la direction du pôle de référence de l'IERS (IRP);
L'axe X est l'intersection de la Méridien de référence de l’IERS (IRM) et le plan
passant par l'origine et perpendiculaire à l'axe Z;
L'axe Y complète le système de la main droite (ECEF : Earth-Centered-Earth-
Fixed) du système de coordonnées orthogonales.
Système de coordonnées GLONASS
Le système géodésique PZ-90.11 (ECEF) est adopté comme système de référence pour
le système GLONASS [ICD-GLONASS, 2008].
Le cadre de référence est défini comme suit :
L’origine est située au centre de masse de la Terre;](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-41-320.jpg)
![20
L'axe Z est dirigé vers le pôle terrestre conventionnel tel que recommandé par le
Service international de la rotation terrestre (IERS);
L'axe X est dirigé vers le point d'intersection de plan équatorial de la Terre et le
méridien zéro établi par la Bosnie-Herzégovine (Bureau International de l'Heure);
L'axe Y complète un système de coordonnées de la main droite.
Le Tableau 2.3 résume leurs paramètres [ICD-GLONASS, 2008] :
Tableau 2.3 : Constantes géodésiques et paramètres des ellipsoïdes.
Paramètres WGS-84 PZ-90.11
Vitesse de rotation de la
Terre
7.292115x10-5
rad/s 7.292115x10-5
rad/s
Constante gravitationnelle 398 600.44x109
m3
/s2
398 600.44x109
m3
/s2
Constante de gravitation de
l'atmosphère (fMa)
0.36x109
m3
/s2
0.35x109
m3
/s2
Vitesse de la lumière dans
le vide
299 792 458 m/s 299 792 458 m/s
Demi-grand axe 6 378 137 m 6 378 136 m
Aplatissement 1/298.257 22 1/298.257 84
Accélération de la pesanteur
équatoriale
-- 978 032.84 mGal
Correction à l'accélération
de la pesanteur à niveau de
la mer en raison de
l'atmosphère
-0.87 mGal -0.87 mGal
Deuxième harmonique
zonal du géopotentiel (J2
0
)
1 081 874x10-9
1 082 625.75x10-9
2.1.4. Transformation entre PZ-90.11 et WGS-84
Pour une combinaison entre GPS et GLONASS, les paramètres de transformation entre
PZ-90.11 et WGS-84 doivent être obtenus si les éphémérides diffusées sont utilisées.](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-42-320.jpg)
![21
Il y a deux méthodes adoptées pour la transformation entre PZ-90.11 et WGS-84. L’une
par [Rossbach et al, 1996] qui ont obtenu un ensemble des paramètres de transformation
à l'aide de stations de coordonnées relatives pour les deux systèmes connus, et l’autre
par [Misra et al, 1996] qui ont utilisé un ensemble des coordonnées GLONASS à la fois
PZ-90.11 et WGS-84 pour obtenir des paramètres de transformation. Les deux
méthodes ont obtenus des résultats comparables (±4 mm).
La transformation de coordonnées des satellites (éphémérides) doit être faite dans la
combinaison GPS/GLONASS pour un positionnement autonome puisque les
éphémérides diffusées sont utilisées avec différents systèmes de référence (pour GPS est
WGS84 et pour GLONASS est PZ-90.11). Toutefois, pour le PPP, ce problème de
transformation ne se pose pas car on y utilise les orbites précises de l’IGS qui sont
toutes exprimées dans le système ITRF.
Système international de référence terrestre (ITRF)
L’ITRF est une réalisation du système international de référence terrestre (ITRS).
L’ITRS a son origine au centre de masse de la Terre incluant les océans et l'atmosphère.
L'ITRS est réalisé par des estimations des coordonnées et des vitesses d'un ensemble de
stations d'observation de l'IERS. Selon les résolutions de l'UAI et l'UGGI, l'orientation
des axes de l'ITRS est cohérente avec le système du Bureau International de l’Heure
(1984.0 ± 3 millisecondes d'arc (mas)) et l'évolution du temps dans l'orientation de
l'ITRS n'a pas une rotation résiduelle par rapport à la croûte terrestre [Boucher &
Altamimi, 2001].
L’équation et les paramètres de transformation de Helmert à faibles angles sont donnés
ci-dessous :
(
𝑋𝑆
𝑌𝑆
𝑍𝑆
) = (
𝑋
𝑌
𝑍
) + (
𝑇1
𝑇2
𝑇3
) + (
𝐷 −𝑅3 𝑅2
𝑅3 𝐷 −𝑅1
−𝑅2 𝑅1 𝐷
) (
𝑋
𝑌
𝑍
) (2.2)
où T1, T2 et T3 sont les composantes du vecteur de translation, R1, R2 et R3 sont les
angles de rotation en radians, autour des axes x, y, z et D est le facteur d’échelle, XS, YS
et ZS sont les coordonnées transformées au système ITRF et X, Y et Z sont les
coordonnées initiales dans le système WGS-84 ou PZ-90.11. Les valeurs des paramètres
de transformation sont données dans [Boucher & Altamimi, 2001]. Le logiciel TRX de](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-43-320.jpg)
![22
RNCan permet la transformation à 14 paramètres du système de coordonnées ITRF au
NAD83 (SCRS).
2.2 Erreurs GNSS et leurs modélisations
Orbites et erreurs d’horloge des satellites
L’erreur d’orbite du satellite est exprimée par la différence entre la position vraie du
satellite et sa valeur calculée. Cette différence est représentée en trois dimensions de
l’orbite : le long de la trace (Along track), transversal (Cross track) et radial (Radial).
Figure 2.1 : Évolution de la précision des orbites finales de l'IGS [IGS, 2013].
Les informations sur l’orbite du satellite GPS et l’erreur de son horloge sont contenues
dans les éphémérides diffusées des satellites sous forme d’éléments de Kepler avec une
précision de l'ordre de 1.6 m pour les positions des satellites et de 7 ns pour les
corrections d'horloge [IGS, 2013]. Les éphémérides diffusées GLONASS sont sous la
forme de coordonnées, vitesses et accélérations. La précision de ces derniers est donnée
dans le Tableau 2.4.](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-44-320.jpg)
![23
Tableau 2.4 : Précision des coordonnées des satellites GLONASS [ICD-GLONASS,
2008].
GLONASS (m) GLONASS-M (m)
Along track ±20 ±7
Cross track ±10 ±7
Radial ±5 ±1.5
Produits précis GPS/GLONASS de l’IGS
Les éphémérides précises GPS de l’IGS sont calculées en utilisant les données
recueillies dans les stations de référence réparties dans le monde dont les coordonnées
sont précisément prédéterminées. Ces stations de référence sont équipées de récepteurs
GPS bifréquences pour recueillir les observations de manière continue. Ces
observations sont ensuite transmises à des centres de traitement de données dans lequel
des algorithmes sophistiqués sont utilisés pour effectuer le calcul pour générer l'orbite et
l’horloge précise du satellite [ICD-GLONASS, 2008].
L’IGS produit trois types d’orbites précises et d'autres organisations comme le Jet
Propulsion Laboratory (JPL) et Ressources Naturelles Canada (RNCan) fournissent
également des produits GPS précis aux utilisateurs. Le JPL peut fournir en temps quasi
réel (TQR-15 min) les orbites précises des satellites et les erreurs d'horloges et aussi les
corrections GPS différentielles sur internet en temps réel [Heflin, 2000]. Le RNCan a
commencé à fournir des produits GPS précis GPS.C qui sont maintenant disponibles par
Internet. Actuellement, pour GLONASS, quatre centres d'analyse IGS peuvent fournir
les produits d'orbites précises GLONASS, dont CODE (Centre for Orbit Determination
in Europe), IAC (Information Analytical Center), ESA (European Space
Agency)/ESOC (European Space Operations Center), BKG (Bundesamt für
Kartographie und Geodäsie, Allemagne), CNES et RNCan (rapides). Le Tableau 2.5
ainsi que le Tableau 2.6 représentent un résumé des produits d’orbites et d'horloges
précises GPS et GLONASS, respectivement [ICD-GPS, 2011].](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-45-320.jpg)
![24
Tableau 2.5 : Produits précis d’orbites et corrections d’erreurs d’horloge des satellites
GPS de l’IGS5
.
Orbite/horloge Précision Latence Mises à jour
Intervalle
d'échantillonnage
Diffusé
Orbite ~100 cm
Temps réel -- Chaque jour
Horloge
~5 ns RMS
~2.5 ns SD
Ultrarapide
(moitié prédite)
Orbite ~5 cm
Temps réel
4 fois
chaque jour
15 min
Horloge
~3 ns RMS
~1.5 ns SD
Ultrarapide
(moitié
observée)
Orbite ~3 cm
3-9 heures
4 fois
chaque jour
15 min
Horloge
~150 ps RMS
~50 ps SD
IGS rapide
Orbite ~2.5 cm
17 - 41
heures
Chaque jour
15 min
Horloge
~75 ps RMS
~25 ps SD
5 min
IGS finale
Orbite ~2.5 cm
~12-18
jours
Chaque
jeudi
15 min
Horloge
~75 ps RMS
~25 ps SD
5 min
Tableau 2.6 : Produits précis d’orbites et corrections d’erreurs d’horloge des satellites
GLONASS de l’IGS.
Orbite/horloge Précision Latence Mise à jour
Intervalle
d’échantillonnage
IGS Finale Orbite 3 cm 12-18 jours
Chaque
jeudi
15 min
IAC Rapide
Orbite --
1 jour --
15 min
Horloge -- 5 min
IAC Finale
Orbite ~15 cm
5 jours --
15 min
Horloge ~1.5 ns 5 min
ESOC
Finale
Orbite --
-- --
15 min
Horloge -- 5 min
Délai ionosphérique
L'ionosphère est l’une des couches de l'atmosphère située à une hauteur qui varie entre
50 à 1000 km d’altitude. Dans cette couche, la lumière ultraviolette du Soleil ionise les
atomes et les molécules. Par conséquent, au cours du phénomène de photo-ionisation,
les électrons et les ions sont produits à partir des particules atmosphériques neutres
[Liao, 2000]. Les signaux micro-ondes sont affectés par les électrons libres de la couche
5
http://igs.org/products/data](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-46-320.jpg)
![25
ionosphérique produisant réfraction, réflexion et absorption. Lorsque des signaux GPS
ou GLONASS traversent l'ionosphère, la vitesse de transmission des signaux change, et
donc la mesure est entachée du délai ionosphérique. L'erreur du délai ionosphérique qui
peut atteindre des dizaines de mètres au zénith est devenue la source d'erreur dominante
depuis la suppression de la disponibilité sélective (SA). Pour atteindre une plus grande
précision dans le positionnement par satellite, l'effet ionosphérique doit être pris en
compte.
En conséquence, la couche ionosphérique provoque des retards sur le code et des
avances sur la phase différente pour les fréquences (L1 et L2) GPS ou GLONASS.
Le retard de groupe de l'ionosphère peut être exprimé en mètres de la façon suivante :
∆ 𝑔=
40.3
𝑓2
∫ 𝑁𝑒 𝑑𝑙 =
40.3
𝑓2
𝑇𝐸𝐶 (2.3)
De même, l'avance de phase de porteuse peut s'écrire sous la forme suivante :
∆𝛷 = ∫(𝑛 𝑝 − 1)𝑑𝑙 = −
40.3
𝑓2
∫ 𝑁𝑒 𝑑𝑙 = −
40.3
𝑓2
𝑇𝐸𝐶 (2.4)
où Ne est la densité d'électrons totaux (el/m3
), f est la fréquence de l'onde radio (Hz),
TEC (Total Electron Content) est le nombre total d'électrons tout le long du trajet entre
un satellite et une station où le TEC est exprimé en el/m2
, (1 TECU = 1016
el/m2
). Avec
la double fréquence (L1&L2), l'effet ionosphère peut être éliminé avec la combinaison
linéaire des mesures sur L1 et L2 selon la propriété de dispersion de l'ionosphère pour
les ondes radio. Les deux équations suivantes représentent les combinaisons
traditionnelles d'observations sans effet ionosphérique [Héroux & Kouba, 2001] :
𝑃𝐼𝐹 =
𝑓𝐿1
2
(𝑓𝐿1
2
− 𝑓𝐿2
2 )
𝑃𝐿1 −
𝑓𝐿2
2
(𝑓𝐿1
2
− 𝑓𝐿2
2 )
𝑃𝐿2
(2.5)
∅𝐼𝐹 =
𝑓𝐿1
2
(𝑓𝐿1
2
− 𝑓𝐿2
2 )
∅ 𝐿1 −
𝑓𝐿2
2
(𝑓𝐿1
2
− 𝑓𝐿2
2 )
∅ 𝐿2 (2.6)
Où PIF et ∅IF sont la combinaison des codes et des phases sans effet ionosphérique, ∅L1
et ∅L2 sont les observations de la phase porteuse sur L1 et L2 en unité de longueur, PL1
et PL2 sont les observations de code au niveau de L1 et L2 et fL1 et fL2 sont les
fréquences porteuses de L1 et L2, respectivement. Notons que le bruit de cette
combinaison est amplifié par un facteur 3.](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-47-320.jpg)
![26
Délai troposphérique
La troposphère est une autre couche de l'atmosphère, son épaisseur est environ 40 km
depuis la surface de la Terre [Hofmann-Wellenhof et al, 2001]. Contrairement à
l’ionosphère, la troposphère est un milieu non dispersif pour les ondes radio et par
conséquent son effet ne peut être éliminé par la combinaison d'observation à partir des
données L1 et L2. L’amplitude du délai troposphérique dépend de nombreux facteurs
tels que l’angle d'élévation du satellite, l’altitude de la station, la pression
atmosphérique, la température et la pression partielle de vapeur d'eau. Il est divisé en
composantes hydrostatique et humide (causée par la vapeur d’eau). La première
représente environ 90% du délai troposphérique totale. Le délai troposphérique
hydrostatique peut être facilement modélisé, mais le délai troposphérique humide est
difficile à modéliser en raison de la variation irrégulière de la vapeur d'eau dans la
troposphère [Misra & Enge, 2006]. Bien que la composante troposphérique humide
représente environ 10% de l'effet total de la troposphère, il provoque la difficulté
majeure dans l'élimination de l'effet de la troposphère par modélisation. Le délai
troposphérique total moyen au zénith est d'environ 2.5 m [Abdel-salam, 2005]. Les
délais troposphériques hydrostatiques et humides sont généralement modélisés au
zénith, puis mis à l'échelle par une fonction de projection (Mapping Function) selon
l'angle d’élévation du satellite.
Erreur d’horloge du récepteur
L’erreur d’horloge du récepteur est généralement estimée comme un paramètre inconnu
avec les trois coordonnées comme dans le cas du positionnement ponctuel précis. Sinon,
l’erreur d'horloge du récepteur peut être éliminée si les observations entre les satellites
sont différenciées (différence simple entre satellites).
Multitrajets
Malgré le développement rapide de la technologie des récepteurs et des antennes GNSS,
les multitrajets restent une source d'erreur importante dans le positionnement et la
navigation. Théoriquement, l'erreur maximale des multitrajets sur les mesures de code
est d'environ la moitié de la longueur d’onde de code: 150 m du code C/A et de 15 m de
P (Y) code. L'effet des multitrajets ne dépasse pas λ/4 sur la mesure de phase, environ 5-](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-48-320.jpg)
![27
6 cm pour L1 et L2, respectivement [Shen, 2002]. L’utilisation des antennes « Choke
Ring » sert à minimiser l’effet des multitrajets.
Décalage de centre de phase du satellite
C’est la séparation entre le centre de masse du satellite et le centre de phase de l’antenne
du satellite. Les orbites précises des satellites se réfèrent au centre de masse des
satellites tandis que les mesures sur les satellites se réfèrent au centre de phase des
antennes émettrices. Ce décalage est pour la plupart orientée selon l’axe Z liée au
satellite (pointant vers le centre de masse de la Terre) et dans la direction X qui est dans
le plan contenant le Soleil (règle de la main droite) et dans la direction de l’axe Y qui est
orientée le long du support des panneaux solaires du satellite [Héroux & Kouba, 2001].
La Figure 2.2 montre le décalage de centre de phase de l'antenne émettrice du satellite.
Le fichier ANTEX de l’IGS contient les informations sur le décalage pour chaque
satellite GPS et GLONASS.
Figure 2.2 : Séparation entre le centre de masse et le centre de phase du satellite
[Héroux & Kouba, 2001].
Décalage de centre de phase de l’antenne du récepteur
Pour le récepteur, les signaux émis par les satellites sont captés au centre de phase de
l’antenne réceptrice qui ne correspond pas nécessairement à son centre géométrique. De
plus, le centre de phase électrique n’est pas un endroit fixe dans l’antenne, il varie en
fonction de l’angle d’élévation et de l’azimut du satellite observé (Figure 2.3). La
distance géométrique entre le satellite et le récepteur, correspond donc à la distance
entre les centres de phase instantanés des antennes émettrice et réceptrice. Pour calibrer
le décalage entre l’ARP (point de référence de l’antenne) et le centre de phase
électrique, deux techniques sont principalement utilisées [Hofmann-Wellenhof et al,
2001] :
La chambre anéchoïque en mode absolu ;](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-49-320.jpg)
![28
Le calibrage robotisé en mode absolu [Wübbena et al, 2000].
Figure 2.3 : Variation de centre de phase d'une antenne [Hofmann-Wellenhof et al,
2001].
Le fichier ANTEX de l’IGS contient les informations sur le décalage pour la plupart des
modèles d’antennes des récepteurs de précision géodésique.
Enroulement de phase
L’enroulement de phase (phase wind-up) est un phénomène physique relatif à la
propagation, ou plus précisément à l’émission et la réception, des ondes
électromagnétiques polarisées. Cet effet peut atteindre jusqu'à la moitié de la longueur
d'onde. La correction est donnée par [Wu et al, 1993] :
𝐷 = 𝑥 − 𝑘(𝑘. 𝑥) + 𝑘 ∗ 𝑦
𝐷′
= 𝑥 − 𝑘(𝑘. 𝑥) + 𝑘 ∗ 𝑦
∆∅ = sin(𝑘. (𝐷′
∗ 𝐷)) cos−1
(𝐷′
. 𝐷/|𝐷′
|𝐷|)
(2.7)
où k est le vecteur unitaire satellite-récepteur, (x, y, z) est le vecteur unitaire du
récepteur local, (𝑥, 𝑦, 𝑧) est le vecteur unitaire des coordonnées du satellite, ∅est la
correction de l’enroulement de phase et D, D’ sont les vecteurs dipolaires effectifs du
satellite et du récepteur, respectivement.
Effets relativistes
Le concept de la relativité introduit par Einstein peut être divisé en deux parties : la
relativité restreinte et la relativité générale. Appliquée au GNSS, la relativité restreinte](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-50-320.jpg)
![29
fait en sorte qu’une horloge à bord d’un satellite GNSS se déplaçant à grande vitesse est
ralentie comparativement à une horloge au repos ou se déplaçant à faible vitesse à la
surface terrestre. Pour sa part, la relativité générale entraîne une accélération de
l’horloge du satellite par rapport à une horloge sur Terre en raison de la différence de
potentiel gravitationnel aux deux endroits [Misra & Enge, 2006]. Ces effets influencent
les horloges et l’orbite des satellites, la propagation des signaux GNS. La correction sur
l’erreur d’horloge du satellite de l’effet relativiste est donnée par l’équation suivante
[ICD-GPS, 2011] :
𝛥𝑡 𝑟 = −
2𝑅⃗ 𝑉⃗
𝑐2
= 1
2⁄ (
𝑉2
𝑐2
) (2.8)
où Δtr est la correction en secondes, R est le vecteur position instantanée du satellite, V
est la vitesse du satellite et c la vitesse de la lumière dans le vide.
L’effet composé de la relativité restreinte et générale fait en sorte que les horloges des
satellites GPS semblent fonctionner plus rapidement. Les horloges sont réglées, au sol
avant le décollage, à une fréquence plus basse que la valeur nominale f0 de 10.23 MHz.
La fréquence moyenne des horloges est donc abaissée de 4.57 x 10-3
Hz, soit -4.465 x
10-10
x f0 , ce qui donne une fréquence de 10.229 999 995 43 MHz.
Sans ce réglage, pendant la durée moyenne de fonctionnement d’un satellite GPS sur 10
ans, l’horloge du satellite aurait pris une avance de 0.14s comparativement à une
horloge au sol [Santerre, 2013].
Marées terrestres
L'effet des marées terrestres qui dépendent de la latitude de la station, la fréquence de
marée (tide frequency), et le temps sidéral peut atteindre environ 30 cm pour la
composante de la hauteur et de 5 cm dans le plan horizontal [Héroux & Kouba, 2001].
L'équation incluant à la fois la correction du déplacement permanent et périodique est
donnée dans l’équation suivante :](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-51-320.jpg)
![30
𝛥 𝑟̅ = ∑
𝐺𝑀𝑗
𝐺𝑀
𝑟4
𝑅𝑗
3
3
𝑗=2
{[3𝑙2
(𝑅̂𝑗. 𝑟̂)]𝑅̂𝑗 + [3 (
ℎ2
2
− 𝑙2) (𝑅̂𝑗. 𝑟̂)
2
−
ℎ2
2
] 𝑟̂}
+ [−0.025𝑚. sin ∅. cos ∅. sin(𝛳𝑔 + 𝜆)]. 𝑟̂
(2.9)
où r est le vecteur de déplacement dans le système de coordonnées cartésiennes, GM
est le paramètre gravitationnel de la Terre, GMj sont les paramètres gravitationnels de la
Lune (j=2) et du Soleil (j=3), r est le vecteur géocentrique de la station, Rj est le vecteur
géocentrique de la Lune (j=2) et du Soleil (j=3), ȓ est le vecteur unitaire géocentrique de
la station, Ȓj est le vecteur unitaire géocentrique de la Lune (j=2) et du Soleil (j=3), l2
est le deuxième nombre de Love (0.609), h2 est le nombre de Shida sans dimension
nominale (0.085), est la latitude, λ est la longitude et ϴg est le temps sidéral moyen de
Greenwich.
Surcharge océanique
L’effet de la surcharge océanique doit être pris en compte pour une station située près de
la mer et une session d’observations de moins de 24 h, alors que son effet est
négligeable lorsque la station est loin des lignes de la côte de l'océan [Héroux & Kouba,
2001]. Le modèle de la surcharge océanique se retrouve dans le document [IERS, 2002].
Surcharge atmosphérique
La surcharge atmosphérique (Atmospheric Loading) est causée par les variations
spatiales et temporelles de la masse atmosphérique. En conséquence, le déplacement
provoqué par la surcharge atmosphérique peut atteindre jusqu'à 20 mm dans la
composante verticale et de 3 mm dans la composante horizontale [Petrov & Boy, 2004].
Un modèle simple est donné comme suit [Rabbel & Schuh, 1986] :
𝛥 𝑟 = − 0.35𝑝 − 0.55𝑝′ (2.10)
ù Δr est le déplacement (3D) causé par le chargement atmosphérique (en mm), p est la
différence de pression du site de la valeur standard (101.3 KPa), p’est l'anomalie de
pression à partir de 2000 km autour de la station.
Effet Sagnac
L’effet Sagnac est provoqué par la rotation de la Terre pendant le temps de propagation
du signal provenant d'un satellite à un récepteur et qui peut être écrite comme suit :](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-52-320.jpg)
![31
𝛳 = (𝜌/𝑐) ∗ ѡ𝑇 (2.11)
où ѡ𝑇 est la vitesse angulaire de rotation de la Terre, c est la vitesse de la lumière dans
le vide et ρ est la distance satellite-récepteur. La valeur maximale de l’effet Sagnac est
de 40 m.
Courbure de l’espace-temps des signaux GNSS
La modélisation de la courbure de l’espace-temps des signaux GNSS est donnée dans
[Hofmann-Wellenhof et al, 2001] :
𝜀𝜌 𝑅𝑒𝑙 = 2
𝐺𝑀
𝑐2
𝑙𝑛 (
𝜌 𝑠
+ 𝜌 𝑅 + 𝜌 𝑅
𝑆
𝜌 𝑠 + 𝜌 𝑅 + 𝜌 𝑅
𝑆) (2.12)
où S
est la magnitude du vecteur position du satellite, R
est la magnitude du vecteur
position du récepteur et S
R est la magnitude du vecteur récepteur-satellite. La valeur
maximale de cet effet est de 1.9 cm.
Dans le positionnement GPS en mode différentiel, la plupart des erreurs peuvent être
entièrement ou partiellement éliminées par la différence entre les observations de deux
stations (fixe et mobile), c’est la raison pour laquelle le positionnement peut atteindre
un niveau millimétrique de précision. Par contre le PPP est un positionnement en mode
absolu, et par conséquent, toutes les erreurs doivent être modélisées en PPP afin
d'atteindre une précision centimétrique.
Le Tableau 2.7 fait état de la magnitude des erreurs non modélisées sur la distance
récepteur-satellite. Ces valeurs sont extraites de [Banville, 2007] et [Seepersad &
Bisnath, 2014].](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-53-320.jpg)
![33
Dans TBC, un utilisateur peut obtenir des résultats adéquats sans modifier
manuellement les données GNSS brutes ni modifier les paramètres par défaut du
processeur. Le moteur de traitement TBC équipé du HD-GNSS utilise les mêmes
techniques de traitement des données que le récepteur Trimble R10 pour la modification
des données, le filtrage, la résolution des ambiguïtés de phase de la porteuse, et
l'estimation de la précision. Les précisions horizontales et verticales rapportées sont
utilisées comme principaux critères d'évaluation pour les résultats des traitements
[Trimble, 2012].
Le moteur de post-traitement applique un modèle troposphérique. Pour toutes les
sessions cinématiques et pour les sessions statiques qui durent moins d'une heure, les
retards troposphériques sont calculés à l'aide du modèle « Hopfield ». Pour les sessions
statiques qui durent plus d'une heure sur les lignes de base de plus de 2 kilomètres, les
délais troposphériques sont calculés à l'aide du modèle « Hopfield » avec la fonction de
projection de « Niell ». En outre, le logiciel TBC peut éventuellement améliorer le
modèle de délai troposphérique en estimant les corrections à l'aide des mesures de
phase. Cette combinaison de modèles et de corrections produit invariablement les
meilleurs résultats et ne nécessite aucune intervention de la part de l'utilisateur de TBC.
Concernant les délais ionosphériques, ces derniers peuvent être minimisés sur les
longues lignes de base en traitant les combinaisons des mesures de phase sans effet
ionosphérique6
. Dans notre recherche, le logiciel TBC a été utilisé pour traiter en mode
relatif (statique et cinématique), les observations de phase GNSS enregistrées par la
station de référence QBC2 par un récepteur Trimble Net R5. La station d’auscultation
topographique fixée sur le pont où les données GNSS sont enregistrées par un récepteur
Ashtech-ProFlex 500. De plus, les données enregistrées par la station de référence PEPS
par un récepteur Ashtech Z-12 a servi lors des périodes où il y a eu des manques dans
les données à la station de référence QBC2. Le Chapitre 3 explique en détail les
récepteurs GNSS et les caractéristiques des récepteurs utilisés.
Le logiciel TBC permet à l’utilisateur de choisir le système de coordonnées et de
modifier l’échelle de temps (GPS, locale ou UTC). Dans notre recherche nous avons
utilisé le système de coordonnées UTM (Universal Transverse Mercator coordinate
6
http://www.trimble.com/](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-55-320.jpg)

![35
2.4 Description du logiciel PPP – RNCan
2.4.1. PPP modèles combinés GPS et GLONASS
Les modèles PPP actuels sont basés sur les observations de code et de phase GPS ou
GPS/GLONASS. L’un des modèles PPP combinés GPS/GLONASS est décrit dans cette
section. Le délai ionosphérique est éliminé par la construction de la combinaison sans
effet ionosphérique à partir des données L1 et L2 (éq 2.5, 2.6). Par la suite, les orbites et
les corrections d’horloge précise des satellites de l’IGS sont utilisées. Les équations
d’observations sans effet ionosphérique de pseudodistance P et de phase de la porteuse
L1 et L2 entre un récepteur et un satellite pour GPS (g) et GLONASS (r) peuvent être
exprimées comme suit [Cai, 2009] :
𝑃𝐼𝐹
𝑔
=
(𝑓𝑔1
2
. 𝑃1
𝑔
− 𝑓𝑔2
2
. 𝑃2
𝑔
)
(𝑓𝑔1
2
− 𝑓𝑔2
2
)
= 𝜌 𝑔 + 𝑐𝑑𝑡 𝑔
+ 𝑑 𝑡𝑟𝑜𝑝
𝑔
+ 𝜀 𝑃 𝐼𝐹
𝑔
(2.13)
Φ𝐼𝐹
𝑔
=
(𝑓𝑔1
2
. Φ1
𝑔
− 𝑓𝑔2
2
. Φ2
𝑔
)
(𝑓𝑔1
2
− 𝑓𝑔2
2
)
= 𝜌 𝑔 + 𝑐𝑑𝑡 𝑔
+ 𝑑 𝑡𝑟𝑜𝑝
𝑔
+ 𝑁𝐼𝐹
𝑔
+ 𝜀Φ 𝐼𝐹
𝑔
(2.14)
𝑃𝐼𝐹
𝑟
=
(𝑓𝑟1
2
. 𝑃1
𝑟
− 𝑓𝑟2
2
. 𝑃2
𝑟)
(𝑓𝑟1
2
− 𝑓𝑟2
2 )
= 𝜌𝑟 + 𝑐𝑑𝑡 𝑔
+ 𝑐𝑑𝑡 𝑠𝑦𝑠 + 𝑑 𝑡𝑟𝑜𝑝
𝑟
+ 𝜀 𝑃 𝐼𝐹
𝑟 (2.15)
Φ𝐼𝐹
𝑟
=
(𝑓𝑟1
2
. Φ1
𝑟
− 𝑓𝑟2
2
. Φ2
𝑟)
(𝑓𝑟1
2
− 𝑓𝑟2
2 )
= 𝜌𝑟 + 𝑐𝑑𝑡 𝑔
+ 𝑐𝑑𝑡 𝑠𝑦𝑠 + 𝑑 𝑡𝑟𝑜𝑝
𝑟
+ 𝑁𝐼𝐹
𝑟
+ 𝜀Φ 𝐼𝐹
𝑟 (2.16)
où cdtr
= cdtg
+ cdtsys.
PIF est la combinaison de code sans effet ionosphérique (m);
ΦIF est la combinaison de phase sans effet ionosphérique (m);
NIF est le terme d'ambiguïté combinée (m);
fi est la fréquence de Li (Hz) ;
𝜀𝐼𝐹 contient le bruit de mesure, ainsi que les multitrajets et d'autres erreurs résiduelles.
Les paramètres inconnus du modèle de positionnement sur lesquelles sont basées les
équations d'observations ci-dessus comprennent les coordonnées (3D), l’erreur
d’horloge du récepteur, la différence entre les échelles de temps, le délai troposphérique
zénithal humide, et les paramètres d'ambiguïtés de phase des satellites GPS et
GLONASS. Mentionnons que le délai troposphérique hydrostatique est d'abord corrigé
en utilisant le modèle troposphérique « Hopfield » et le délai troposphérique zénithal](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-57-320.jpg)
![36
humide (ZWD) doit être estimé comme un paramètre inconnu. La fonction de projection
« Niell » a été utilisée pour les composantes hydrostatique et humide. Les positions
(3D), l’erreur d'horloge du récepteur, la différence d’échelle de temps et le paramètre
ZWD sont modélisés par un processus de marche aléatoire tandis que les paramètres
d'ambiguïtés sont modélisés comme constantes et sont estimés à l'aide d'un filtre de
Kalman. La procédure de base du traitement PPP avec des observations combinées GPS
et GLONASS est schématisée dans la Figure 2.4 [Cai, 2009].
Figure 2.4 : Traitement PPP combiné GPS et GLONASS.
Les ambiguïtés de phase (nombre entier de longueurs d’onde) dans PPP sont des
paramètres inconnus qu’on estime par moindres carrés. En mode absolu (PPP), la
résolution des ambiguïtés est difficile à cause des biais de phase (phase bias). Avec le
logiciel PPP-RNCan actuellement disponible (version 1.05), la résolution des
ambiguïtés de phase en mode absolu n’est pas possible.
Plusieurs projets de recherche concernant la résolution des ambiguïtés de phase en mode
absolu (PPP) sont en cours et plusieurs chercheurs ont réussi à améliorer la précision du
PPP en fixant les ambiguïtés de phase en mode absolu en se basant sur l’estimation des
biais de phase calculés par l’IGS [Banville, 2014].](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-58-320.jpg)


![40
Tableau 3.1 : Caractéristiques du pont de Québec [DRC, 1908a].
Mètres Pieds (ft)
Longueur de la travée centrale
suspendue
195.07 640
Longueur totale du pont 987.24 3 239
Distance entre les piliers principaux 548.64 1800
Largeur du pont
26.82 (intérieur) -
30.48 (extérieur)
88 (intérieur) -
100 (extérieur)
Hauteur des piliers principaux
32.91 (nord) -
39.01 (sud)
108 (nord) -
128 (sud)
Hauteur libre de la travée centrale
suspendue
45.72 (marée haute) –
52.42 (marée basse)
150 (marée haute) -
172 (marée basse)
Tableau 3.2 : Poids et coût d'entretien du pont de Québec.
Poids Quantité/mesures
Poids total de la travée centrale 4 985 tonnes métriques
Poids total de la superstructure d’acier 59 862 tonnes métriques
Nombre des rivets 1 066 740
Coût de construction du pont 25 millions $ (en 1907)
Quantité de peinture nécessaire pour
recouvrir le pont en entier
Environ 12 500 gallons ou 56 825 litres
Estimé du coût d’entretien annuel 3 millions $ (en 1996)
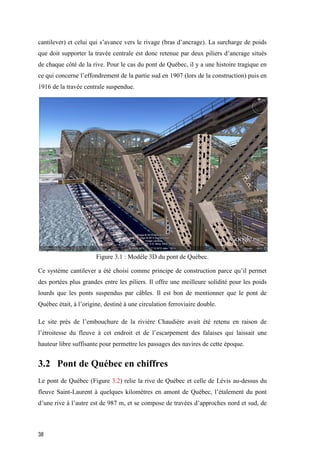
3.3 Plans et devis d’origine
Le pont de Québec est construit essentiellement d’acier (Figure 3.3). Pour ce type
d’ouvrage, dès sa construction, les ingénieurs ont tenu compte des différentes
contraintes qui s’exercent sur celui-ci. Pour cela, ils ont estimé après des longs calculs
(sans calculatrices ou ordinateurs) les valeurs des déformations maximales causées par
chaque contrainte.](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-62-320.jpg)
![41
Figure 3.3 : Piliers et poutres principaux du pont de Québec.
La Figure 3.4 est l’un des documents d’origine qui résument les dimensions, les
quantités et les poids des différentes composantes du pont de Québec [DRC, 1908b].
Figure 3.4 : Document d’origine des dimensions, des poids des différentes composantes
et d’autres quantités du pont de Québec.](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-63-320.jpg)

![43
Aussi la déformation maximale causée par l'expansion ou la contraction maximale de
l'acier entre les piliers principaux (selon l’axe longitudinal) de diverses contraintes et
surtout de la variation de la température de 83°C (150°F) «Maximum expansion or
contraction of steel work between main piers from varying stress and from temperature
variation of 150 Fahr» est de 64 cm.
Pour la contribution de la variation de température, on obtient :
11
𝑝𝑝𝑚
°C
∗ 83°C ∗ 549 m = 51 𝑐𝑚 (3.3)
La Figure 3.6 est un autre plan d’origine qui illustre la déformation de la travée
suspendue du pont causée par une charge de 7441 kg/mètre linéaire (5000 pound/linear
feet) plus une charge supplémentaire de 45360 kg (100000 pounds) à la poutre 8 et 9
(milieu de la travée suspendue). La couleur noire représente l’état du pont sans aucune
charge, la couleur rouge correspond à une pleine charge (fully loaded) et la couleur
jaune est l’état après le déchargement (reversed dead load).
Figure 3.6 : Déformation de la travée centrale causée par un chargement de 7441 kg/m
plus une charge supplémentaire de 45360 kg à la poutre 8 et 9 (milieu de la travée
suspendue) [DRC, 1908b].
D’après ce plan d’origine, la distance entre la ligne rouge et jaune est égale à 20 cm
(7.91 in) tandis que la distance entre la ligne noire et rouge atteint le 10 cm (4.11 in). Le
schéma montre les déplacements de la travée suspendue lors du déchargement (ligne
noire), qui est sous la charge morte seulement, et lorsqu'il est complètement chargé avec
une charge comme ci-dessus (ligne rouge). Les déplacements de la poutre en raison des
contraintes des charges mortes inversées sont également présentés (ligne jaune).](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-65-320.jpg)
![44
La Figure 3.7 illustre les déformations maximales prédites causées par la variation de
température et la vitesse du vent.
Figure 3.7 : Plan d’origine des déformations maximales causées par la température et le
vent [DRC, 1908b].
Le premier croquis illustre les déformations causées par le vent qui frappe le pont dans
la direction transversale. On remarque dans la partie supérieure de la Figure 3.7 que la
structure se déforme dans le sens transversal. Ces déformations transversales de 34 cm
(13.5 in) sont dues à une vitesse du vent qui atteint 170 km/h. La conversion avec les
valeurs du vent du document d’origine est la suivante :
30
𝑙𝑏
𝑝𝑖2
(
𝑙𝑏
𝑓𝑡2
) = 312
𝑙𝑏
𝑚2
= 141.6
𝑘𝑔
𝑚2
= 1387
𝑁
𝑚2
= 47.1
𝑚
𝑠
= 170 𝑘𝑚/ℎ (3.4)
Le coefficient de proportionnalité entre un vent transversal et sa réaction dans le sens
transversal du pont de Québec est de 1.18 x 10-5
(0.34 m/ (170 km/h) 2
). Le Tableau 3.3
résume l’effet prédit sur le déplacement transversal de la travée suspendue du pont
causé par un vent transversal.
Tableau 3.3 : Vent transversal et son effet prédit sur le déplacement transversal du pont.
Vent (km/h) Déplacement transversal (cm)
170 34.3
100 11.9
50 3.0
25 0.7
10 0.1](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-66-320.jpg)





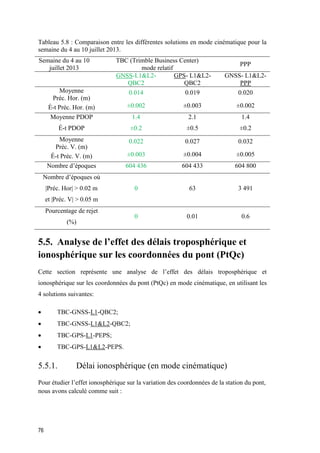
![54
Tableau 4.3 : Coordonnées obtenues par PPP (solution GNSS-L1&L2 en mode absolu
statique) pour la station de référence QBC2 suivant les quatre semaines choisies avec
les précisions, RMS des résiduelles, le délai troposphérique et leur précision, le nombre
d’observations traitées et la température moyenne par jour. La valeur entre les crochets
est la précision de la moyenne hebdomadaire.
N (m)
5186060
+
σN
(mm)
E (m)
325960
+
σE
(mm)
h (m) σh
(mm)
RMS
(m)
TZD
(m)
σTZD
(mm)
# obs.
traitées
GPS et
GLONASS
T
(°)
Semained'automne
(7au13octobre2012)
7.876 ±1 1.113 ±3 -7.096 ±6 0.009 2.381 0.8 1 259 964 8.4
7.876 ±1 1.113 ±2 -7.103 ±5 0.009 2.380 0.7 1 331 169 7.0
7.879 ±1 1.117 ±2 -7.098 ±5 0.009 2.391 0.8 1 317 874 8.2
7.876 ±1 1.115 ±3 -7.096 ±5 0.009 2.415 0.8 1 327 411 9.8
7.879 ±1 1.115 ±2 -7.094 ±5 0.009 2.364 0.7 1 287 472 7.5
7.879 ±1 1.113 ±2 -7.097 ±5 0.009 2.366 0.7 1 303 495 5.2
7.876 ±1 1.115 ±2 -7.098 ±5 0.009 2.380 0.7 1 303 825 3.0
Moy 7.877 [±0.4] 1.114 [±0.9] -7.097 [±1.9] 0.009 2.382 [±0.3] 1 304 459 7.0
É-t ±0.002 - ±0.002 - ±0.003 - - ±0.017 - - -
Semained'hiver
(17au23janvier2013)
7.876 ±1 1.113 ±2 -7.092 ±5 0.009 2.327 0.5 1 298 184 -6.3
7.876 ±1 1.117 ±2 -7.098 ±6 0.009 2.336 0.6 1 331 887 -18.6
7.876 ±1 1.115 ±2 -7.097 ±5 0.009 2.354 0.7 1 339 649 -10.6
7.873 ±1 1.112 ±2 -7.098 ±5 0.009 2.333 0.7 1 334 731 -4.7
7.876 ±1 1.113 ±2 -7.103 ±5 0.009 2.316 0.5 1 334 365 -17.8
7.873 ±1 1.112 ±3 -7.101 ±5 0.009 2.315 0.5 1 304 677 -20.0
7.873 ±1 1.115 ±2 -7.106 ±5 0.009 2.323 0.5 1 305 375 -23.6
Moy 7.875 [±0.4] 1.114 [±0.8] -7.099 [±1.9] 0.009 2.329 [±0.2] 1 321 267 -14.5
É-t ±0.002 - ±0.002 - ±0.005 - - ±0.013 - -
Semaineduprintemps
(19au25mai2013)
7.876 ±1 1.115 ±2 -7.102 ±5 0.009 2.414 0.9 1 345 841 11.9
7.879 ±1 1.115 ±2 -7.101 ±5 0.009 2.444 0.9 1 345 367 14.6
7.876 ±1 1.115 ±2 -7.091 ±5 0.009 2.441 0.9 1 340 164 13.4
7.879 ±1 1.115 ±2 -7.094 ±5 0.010 2.475 1.0 1 344 770 12.4
7.876 ±1 1.113 ±2 -7.100 ±5 0.010 2.530 1.1 1 346 505 15.2
7.880 ±1 1.108 ±2 -7.097 ±5 0.009 2.489 1.0 1 230 404 10.5
7.876 ±1 1.110 ±2 -7.101 ±5 0.009 2.441 0.9 1 344 992 10.2
Moy 7.877 [±0.4] 1.113 [±0.8] -7.098 [±1.9] 0.009 2.462 [±0.4] 1 328 292 12.6
É-t ±0.002 - ±0.003 - ±0.004 - - ±0.039 - -
Semained'été
(4au10juillet2013)
7.876 ±1 1.115 ±2 -7.090 ±5 0.009 2.547 1.0 1 347 425 24.1
7.879 ±1 1.111 ±2 -7.101 ±5 0.011 2.551 1.0 1 370 130 24.7
7.876 ±1 1.113 ±2 -7.096 ±5 0.010 2.515 1.0 1 370 713 25.4
7.873 ±1 1.117 ±2 -7.092 ±5 0.010 2.521 1.0 1 368 173 24.8
7.882 ±1 1.119 ±2 -7.090 ±5 0.010 2.492 1.0 1 367 712 20.0
7.873 ±1 1.110 ±2 -7.095 ±5 0.009 2.512 1.0 1 368 945 20.8
7.873 ±1 1.112 ±3 -7.095 ±6 0.010 2.544 1.1 1 362 991 22.9
Moy 7.876 [±0.4] 1.114 [±0.8] -7.094 [±1.9] 0.010 2.526 [±0.4] 1 365 156 23.2
É-t ±0.003 - ±0.003 - ±0.004 - - ±0.022 - -](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-76-320.jpg)
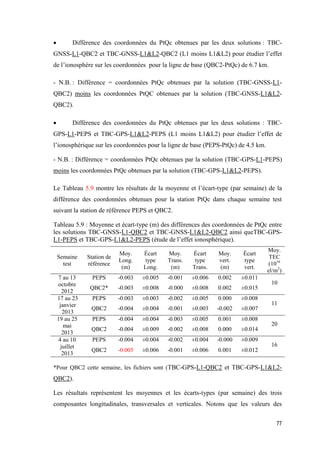
![55
Tableau 4.4 : Coordonnées obtenues par PPP (solution GPS-L1&L2 en mode absolu
statique) pour la station de référence PEPS suivant les quatre semaines choisies avec les
précisions, RMS des résiduelles, le délai troposphérique et leur précision, le nombre
d’observations traitées et la température moyenne par jour. La valeur entre les crochets
est la précision de la moyenne hebdomadaire.
N (m)
5183790
+
σN
(mm)
E (m)
326180
+
σE
(mm)
h (m) σh
(mm)
RMS
(m)
TZD
(m)
σTZD
(mm)
# obs.
traitées
GPS
T(°)
Semained'automne
(7au13octobre2012)
2.699 ±2 4.499 ±4 73.880 ±7 0.006 2.353 1.1 697 273 8.4
2.699 ±2 4.499 ±4 73.874 ±7 0.006 2.355 1.1 702 603 7.0
2.696 ±2 4.499 ±4 73.876 ±8 0.006 2.364 1.1 704 332 8.2
2.696 ±2 4.499 ±4 73.883 ±8 0.006 2.387 1.1 699 894 9.8
2.699 ±2 4.499 ±4 73.883 ±7 0.006 2.337 0.9 703 324 7.5
2.702 ±2 4.499 ±4 73.878 ±8 0.006 2.340 0.9 702 747 5.2
2.699 ±2 4.501 ±4 73.878 ±7 0.006 2.353 1.0 706 788 3.0
Moy 2.699 [±0.8] 4.499 [±1.5] 73.879 [±2.8] 0.006 2.356 [±0.4] 702 423 7.0
É-t ±0.002 - ±0.001 - ±0.003 - - ±0.017 - -
Semained'hiver
(17au23janvier2013)
2.702 ±2 4.499 ±4 73.882 ±7 0.006 2.309 1.1 697 345 -6.3
2.699 ±2 4.499 ±4 73.873 ±7 0.006 2.318 0.6 702 597 -18.6
2.702 ±2 4.499 ±4 73.876 ±7 0.006 2.336 0.7 705 532 -10.6
2.702 ±2 4.499 ±4 73.878 ±7 0.006 2.317 0.6 698 123 -4.7
2.699 ±2 4.497 ±4 73.873 ±7 0.006 2.295 0.6 706 543 -17.8
2.699 ±2 4.497 ±4 73.874 ±7 0.006 2.303 1.2 701 747 -20.0
2.699 ±2 4.499 ±4 73.867 ±8 0.006 2.306 0.6 706 428 -23.6
Moy 2.700 [±0.8] 4.498 [±1.5] 73.875 [±2.7] 0.006 2.312 [±0.3] 702 616 -14.5
É-t ±0.002 - ±0.001 - ±0.005 - - ±0.013 - -
Semaineduprintemps
(19au25mai2013)
2.699 ±2 4.499 ±4 73.874 ±8 0.006 2.388 1.1 704 952 11.9
2.702 ±2 4.495 ±4 73.879 ±8 0.006 2.417 1.2 711 726 14.6
2.702 ±2 4.499 ±4 73.881 ±8 0.006 2.413 1.2 711 879 13.4
2.702 ±2 4.499 ±4 73.881 ±8 0.007 2.446 1.3 708 538 12.4
2.702 ±2 4.497 ±4 73.884 ±8 0.007 2.500 1.4 712 075 15.2
2.702 ±2 4.495 ±4 73.882 ±8 0.006 2.458 1.2 714 156 10.5
2.699 ±2 4.497 ±4 73.877 ±8 0.006 2.413 1.1 711 467 10.2
Moy 2.701 [±0.8] 4.497 [±1.5] 73.880 [±3.0] 0.006 2.434 [±0.5] 710 685 12.6
É-t ±0.001 - ±0.002 - ±0.003 - - ±0.037 - -
Semained'été
(4au10juillet2013)
2.696 ±2 4.493 ±8 73.876 ±13 0.006 2.527 1.0 705 643 24.1
2.708 ±2 4.499 ±4 73.878 ±8 0.006 2.532 1.1 711 836 24.7
2.702 ±2 4.495 ±4 73.868 ±8 0.006 2.497 1.1 711 989 25.4
2.696 ±2 4.501 ±4 73.873 ±8 0.006 2.500 1.1 708 538 24.8
2.705 ±2 4.504 ±4 73.880 ±8 0.006 2.475 1.0 711 875 20.0
2.699 ±2 4.495 ±4 73.875 ±8 0.006 2.497 1.1 716 516 20.8
2.696 ±2 4.499 ±5 73.878 ±9 0.006 2.520 1.1 714 186 22.9
Moy 2.700 [±0.8] 4.498 [±1.9] 73.875 [±3.4] 0.006 2.507 [±0.4] 711 512 23.2
É-t ±0.005 - ±0.004 - ±0.004 - - ±0.020 - -](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-77-320.jpg)
![56
Afin de vérifier la stabilité des stations de référence d’une saison à l’autre, nous avons
calculé pour chaque semaine la valeur moyenne des coordonnées et la précision de la
moyenne. La précision de la moyenne est calculée suivant la règle de propagation des
erreurs.
∑ 𝑎𝑣𝑔 = G ∑𝜎 GT
(4.1)
𝜎 𝑎𝑣𝑔
2
= [
1
𝑛
1
𝑛
⋯
1
𝑛
]
[
𝜎1
2
𝜎2
2
⋱
𝜎 𝑛
2
]
[
1 𝑛⁄
1 𝑛⁄
⋮
1 𝑛⁄
] (4.2)
𝜎 𝑎𝑣𝑔
2
=
𝜎1
2
𝑛2
+
𝜎2
2
𝑛2
+ ⋯ +
𝜎 𝑛
2
𝑛2
(4.3)
𝜎 𝑎𝑣𝑔 =
𝜎
√ 𝑛
(4.4)
Où G est la matrice Jacobienne d'observation linéarisé et n représente le nombre de
valeurs par semaine (n = 7). Nous avons utilisé l’équation (4.3) dans le cas où les
précisions ne sont pas identiques et l’équation (4.4) lorsqu’elles le sont.
Le Tableau 4.5 résume la moyenne des coordonnées, des précisions et des températures
des quatre semaines choisies pour la station QBC2 et le Tableau 4.6 résume celles de la
station PEPS. Notant que les précisions des différences maximales « Différence Max »
dans les deux tableaux ont été calculées en tenant compte de la précision de chacune des
valeurs individuelles (valeurs soulignées).](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-78-320.jpg)
![59
Tableau 4.7 : Coordonnées obtenues par TBC (solution GPS-L1&L2 en mode relatif
statique par rapport à QBC2) pour la station de référence PEPS suivant les quatre
semaines choisies avec les précisions, RMS des résiduelles et la température moyenne
par jour. La valeur entre les crochets est la précision de la moyenne hebdomadaire.
N (m)
5183790+
σN
(mm)
E (m)
326180+
σE
(mm)
h (m) σh
(mm)
RMS
(m)
T(°)
Semained'automne
(7au13octobre2012)
2.714 ±0 4.497 ±2 73.873 ±4 0.001 8.4
2.716 ±0 4.501 ±2 73.876 ±4 0.001 7.0
2.712 ±0 4.496 ±2 73.872 ±4 0.003 8.2
2.713 ±0 4.497 ±2 73.876 ±4 0.003 9.8
2.714 ±0 4.496 ±2 73.869 ±4 0.002 7.5
2.713 ±0 4.497 ±2 73.872 ±4 0.001 5.2
2.713 ±0 4.494 ±2 73.868 ±4 0.002 3.0
Moyenne 2.714 [±0.0] 4.497 [±0.8] 73.872 [±1.5] 0.002 7.0
Écart-type ±0.001 - ±0.002 - ±0.003 - - -
Semained'hiver
(17au23janvier2013)
2.716 ±0 4.497 ±2 73.868 ±4 0.001 -6.3
2.710 ±0 4.496 ±2 73.872 ±4 0.002 -18.6
2.713 ±0 4.498 ±2 73.872 ±2 0.001 -10.6
2.712 ±0 4.498 ±2 73.872 ±2 0.001 -4.7
2.711 ±0 4.497 ±2 73.872 ±4 0.002 -17.8
2.711 ±0 4.497 ±2 73.872 ±4 0.002 -20.0
2.710 ±0 4.497 ±2 73.873 ±4 0.001 -23.6
Moyenne 2.712 [±0.0] 4.497 [±0.8] 73.872 [±1.3] 0.001 -14.5
Écart-type ±0.002 - ±0.001 - ±0.002 - - -
Semaineduprintemps
(19au25mai2013)
2.713 ±0 4.496 ±2 73.871 ±4 0.002 11.9
2.715 ±0 4.497 ±2 73.870 ±4 0.002 14.6
2.715 ±0 4.497 ±0 73.870 ±4 0.002 13.4
2.715 ±0 4.497 ±2 73.870 ±4 0.001 12.4
2.715 ±0 4.497 ±2 73.871 ±4 0.002 15.2
2.714 ±0 4.498 ±2 73.868 ±4 0.001 10.5
2.717 ±0 4.496 ±2 73.869 ±4 0.002 10.2
Moyenne 2.715 [±0.0] 4.497 [±0.7] 73.870 [±1.5] 0.002 12.6
Écart-type ±0.001 - ±0.001 - ±0.001 - - -
Semained'été
(4au10juillet2013)
2.713 ±2 4.498 ±2 73.870 ±4 0.002 24.1
2.715 ±0 4.498 ±2 73.877 ±4 0.002 24.7
2.715 ±0 4.498 ±2 73.869 ±4 0.002 25.4
2.710 ±0 4.499 ±2 73.878 ±4 0.002 24.8
2.714 ±0 4.498 ±2 73.872 ±4 0.002 20.0
2.715 ±0 4.496 ±2 73.870 ±4 0.001 20.8
2.715 ±0 4.498 ±0 73.877 ±4 0.002 22.9
Moyenne 2.714 [±0.0] 4.498 [±0.7] 73.873 [±1.5] 0.002 23.2
Écart-type ±0.002 - ±0.001 - ±0.004 - - -](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-81-320.jpg)








![78
écarts-types sont représentatives de la précision (erreurs aléatoires présentent dans les
solutions L1&L2 vs L1) donc moins précises en verticales que selon les composantes
horizontales. Dans cette étude, il faut plutôt considérer l’erreur systématique (moyenne
des composantes).
La propagation des erreurs systématiques en mode relatif et avec ambiguïtés fixées est
donnée par [Santerre, 2013] qui explique entre autres l’effet du délai ionosphérique et
troposphérique sur le positionnement relatif. Cette étude a été faite en mode statique
tandis que nos résultats obtenus après une étude en mode cinématique. D’après
[Santerre, 1991], avec des récepteurs L1 (solution monofréquence), l’effet
ionosphérique sur un vecteur de 10 km avec un masque d’élévation de 10° est de 7.1
mm (trop courte) où K= -0.71 ppm par 1x1017
el/m2
en mode statique.
Dans notre réseau, les deux lignes de base sont de 6.7 km (QBC2-PtQc) et 4.5 km
(PEPS-PtQc). Alors, avec une valeur de TEC de 1017
el/m2
, la ligne de base (QBC2-
PtQc) devrait être trop court de 5 mm et (PEPS-PtQc) de 3 mm, respectivement en
direction longitudinale, car les deux lignes de base sont orientées nord-sud (voir
section 4.1). En tenant compte des valeurs moyennes de TEC de chaque semaine
(Tableau 5.9), on obtient comme suit :
Pour la première semaine du 7 au 13 octobre 2012, la valeur de TEC était de
1x1017
el/m2
. Donc, avec la moyenne de différence des coordonnées longitudinales
obtenues avec les 2 solutions TBC-GPS-L1-QBC2 et TBC-GPS-L1&L2-QBC2), il faut
avoir un 3 mm d’écart (vecteur trop court) pour (PEPS-PtQc) et 5 mm pour (QBC2-
PtQc). On a obtenu 3 mm d’écart avec PEPS et QBC2.
Pour la deuxième semaine, avec une valeur de TEC de 1.1x1017
el/m2
, on a
obtenue 3 mm avec (PEPS-PtQc) et 4 mm avec (QBC2-PtQc).
Pour la 3e
semaine et avec l’augmentation des valeurs de TEC à 20, l’écart doit
être plus grand par rapport aux 2 premières semaines. La valeur longitudinale obtenue
est de 4 mm avec PEPS et QBC2. Comparativement, pour QBC2 entre les 2e
et 3e
semaines (moyenne longitudinale), il y a un écart de 4 mm même que le TEC est le
double dans la 3e
semaine (20) que la 2e
semaine (11).](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-100-320.jpg)
![79
Pour la 4e
semaine, les valeurs sont pareilles que la 3e
semaine avec une petite
différence.
Selon [Santerre, 2013], comme par exemple, avec la valeur de 20 TECU, il faudrait
avoir 6 mm de différence avec PEPS et 10 mm avec QBC2. Ces valeurs ne collent pas
parfaitement avec nos résultats. Cela peut s’expliquer par le mode de traitement.
L’étude précédente était faite en mode statique tandis que notre nouvelle étude est en
mode cinématique à la seconde. Il se peut qu’à chaque seconde les coordonnées
absorbent une partie du délai ionosphérique, pour cela nos valeurs (moyenne
longitudinale) sont moins grandes. Cette hypothèse devra être prouvée dans une autre
étude plus approfondie sur la relation entre les valeurs TEC et l’effet du délai
ionosphérique sur la variation des coordonnées en mode cinématique. Par contre les
écarts-types des différences des coordonnées en direction longitudinale sont grands.
Ceci est causé par la variabilité du contenu total d’électrons (TEC) dans le ciel de
Québec qui varie beaucoup entre le jour et la nuit.
Notons que la valeur maximale du TEC présentée dans notre étude en se référant au
Tableau 5.2 est de 46 TECU (46x1016
el/m2
= 4.6x1017
el/m2
).
5.5.2. Délai troposphérique (en mode cinématique)
Le Tableau 5.10 présente la différence des coordonnées du PtQc obtenues par les deux
solutions : TBC-GPS-L1&L2-QBC2 et TBC-GPS-L1&L2-PEPS (PEPS moins QBC2)
pour étudier l’effet de la troposphère sur les coordonnées du pont (PtQc). Nous avons
utilisé ces 2 solutions, car le délai ionosphérique a été éliminé avec la combinaison
(L1&L2-sans effet ionosphérique). Les résultats représentent les moyennes et les écarts-
types (par semaine) des trois composantes longitudinales, transversales et verticales.](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-101-320.jpg)











![93
moyenne des coordonnées obtenue (pour la semaine d’été) est de 59.005 m et celle de
température est de 23.2°C.
En effet, l’acier du pont en hiver (janvier) se contracte et en été (juillet) se dilate. Ces
contractions et dilatations sont en relation avec le coefficient de dilatation thermique de
l’acier qui est égal à 11 ppm/°C [DRC, 1908a]. L’équation (6.1) représente le calcul avec
les résultats obtenus. Notant que 69 m est la hauteur de l’antenne à partir du niveau le plus
bas du pont (voir Figure 3.2).
Déplacement mesuré = 59.005 - 58.979 = 0.026 m
Différence de température = 23.2 + 14.5 = 37.7°C
Prédiction du déplacement vertical = 69 m x 11 ppm/°C x 37.7°C = 0.029 m
(6.1)
À partir de ces calculs, le déplacement mesuré est de 0.026 m et la prédiction du
déplacement vertical est de 0.029 m. On peut conclure qu’il y a seulement 3 mm de
différence entre le déplacement mesuré et la valeur prédite. Un résultat très acceptable en
considérant que le délai troposphérique du logiciel TBC pour la saison d’été est
probablement déficient pour une forte dénivellation entre les stations (voir Tableau 5.10).
Dans le but de calculer le temps de réaction du pont (composante verticale) en fonction de
la température, nous avons corrélé la moyenne mobile aux 10 minutes de la variation
verticale des trois semaines suivantes : du 7 au 13 octobre 2012, du 28 avril au 4 mai 2013
et du 30 juin au 6 juillet 2013 avec la température de l’air aux 10 minutes. Dans ces trois
semaines, la température monte et descend de manière périodique. La Figure 6.11 montre la
corrélation croisée (cross correlation) pour la semaine du 30 juin au 6 juillet 2013. La
courbe bleue est la variation verticale (moyenne mobile aux 10 minutes), la courbe verte est
la variation de la température de l’air durant cette semaine aux 10 minutes et la courbe
rouge représente la corrélation entre les deux courbes (bleue et verte).](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-115-320.jpg)








![103
La partie centrale montre la variation transversale (courbe bleue) avec le vent transversal
(courbe rouge). On remarque que le pont réagit rapidement dans la direction des vents.
La partie inférieure de cette figure représente la variation verticale (courbe bleue) avec la
courbe de la température (courbe rouge). Aussi, cette figure contient une courbe verte qui
représente la prédiction de déplacement du pont selon la verticale calculée à partir de
l’équation (6.2) suivante :
Rappelons que la valeur de 69 m est la hauteur de l’antenne à partir du point le plus bas du
pont et la valeur de 11 ppm/°C est le coefficient de dilatation thermique de l’acier. On
remarque que le pont se dilate lorsque la température est haute et se contracte lorsque la
température est basse comme discuté précédemment (voir section 6.2.2).
Figure 6.26 : Variation annuelle des déformations (moyenne des coordonnées par jour et
moyenne des températures et vents par jour). Variation longitudinale (en partie supérieure),
variation transversale (partie centrale) et variation verticale (partie inférieure).
𝑉𝑎𝑙𝑒𝑢𝑟 𝑝𝑟é𝑑𝑖𝑡𝑒 𝑑𝑒 𝑙𝑎 𝑣𝑎𝑟𝑖𝑎𝑡𝑖𝑜𝑛 𝑑𝑒 ℎ
= 69 𝑚 ∗ 11
𝑝𝑝𝑚
°𝐶
∗ [𝑇𝑒𝑚𝑝é𝑟𝑎𝑡𝑢𝑟𝑒 𝑗𝑜𝑢𝑟𝑛𝑎𝑙𝑖è𝑟𝑒 (°𝐶)] (6.2)](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-125-320.jpg)
![104
6.4. Effet de front météorologique sur les coordonnées
Un front météorologique consiste en une surface atmosphérique de discontinuité étendue,
qui sépare deux masses d’air ayant des propriétés physiques différentes (ex. température,
humidité, pression). Les fronts météorologiques peuvent perturber considérablement les
observations GPS (GNSS). Parce qu'ils se produisent dans la troposphère, ils laissent leur
marque dans le délai de propagation troposphérique. Il y a deux types de base de fronts
chaud et froid [Luddington & Santos, 2010].
Cette section représente une étude de cas qui démontre un effet d’un front météorologique
sur la variation des coordonnées. Après l’analyse de tous les résultats de notre année
d’étude, il restait quelques anomalies (au nombre d’une dizaine) sans explication,
probablement des sauts de cycle détectés mais mal corrigés. Certaines autres anomalies
sont peut-être explicables par ce qui suit.
La Figure 6.27 montre la variation des coordonnées 3D pour la journée du 3 décembre
2012. Dans cette figure, les deux pics (entourés par un cercle noir) représentent un
déplacement longitudinal vers le sud de valeur environ 7 cm et un déplacement vertical vers
le haut de valeur dépasse les 10 cm. Notant que les précisions horizontales, verticales et la
valeur des RMS des résiduelles en mode statique relatif par rapport à la station de référence
PEPS (GPS-L1) étaient 1 mm, 2 mm et 8 mm, respectivement pour cette journée (3
décembre 2012).
Figure 6.27 : Variation longitudinale, transversale et verticale pour la journée du 3
décembre 2012 (solution GPS-L1-PEPS) avec les deux pics, longitudinalement vers le bas
(vers le sud) et verticalement vers le haut.](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-126-320.jpg)




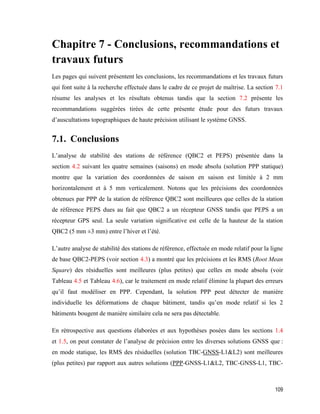

![114
Dans le cadre de cette recherche, nous avons utilisé la station de référence QBC2 (et parfois
PEPS). Cette station est à une distance de 6.7 km avec une forte dénivelée (66 m) par
rapport à la station du pont. Cette situation amplifie le problème de la modélisation des
délais troposphériques, introduit des erreurs systématiques et diminue les précisions des
coordonnées. Donc, il serait préférable d’établir au moins une station de référence GNSS à
proximité du pont (distance de moins de 1 km avec la plus faible dénivelé possible).
Une autre recommandation repose sur l’amélioration de la précision verticale. Cette
amélioration serait réalisable en branchant chacune des antennes par fibre optique à un seul
récepteur GNSS. Cette proposition sert à améliorer la précision verticale et diminuer le coût
d’achat des instruments [Macias-Valadez et al, 2012].
Le logiciel utilisé pour traiter nos données était le logiciel TBC de « Trimble ». Ce dernier
est un très bon outil en termes de facilité d’utilisation. Un problème rencontré était la
méthode de traitement manuel (jour/jour). Afin de faciliter le traitement d’une grande
quantité de données, il sera préférable d’utiliser un logiciel qui permet de façon
d’automatiser les traitements comme le logiciel BERNESE (Bernese Processing Engine-
BPE) ou GAMIT/GLOBK (GPS data processing). Notons aussi que le code source de ces
logiciels est normalement accessible ce qui permet de connaître les algorithmes réellement
utilisés (contrairement à TBC).
Dépendamment du projet et de l’objectif visé, le traitement des observations GNSS en
temps réel (TR) serait également un atout pour réduire la quantité de données à
emmagasiner à chaque site. En effet, il est préférable pour une question de surveillance de
développer un logiciel pour ausculter une structure d’ingénierie en temps réel ABMS
(Automated Bridge Monitoring System). Ce système d’automatisation sert à collecter, gérer
les données, calculer, analyser, représenter les résultats, visualiser et signaler avec des
alertes et des alarmes automatisées dans le cas de danger. Ce système a des avantages et des
inconvénients (le lecteur intéressé par ce sujet est invité à consulter 14
pour plus des
détails).
14
http://www.trimble.com/Infrastructure/Monitoring-
Applications.aspx?tab=Dam,_Tailing_Dam_and_Reservoir_Monitoring](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-136-320.jpg)


![117
Bibliographie
Abdel-salam, M.A. (2005). Precise Point Positioning Using Un-Differenced Code and
Carrier Phase Observations. Ph.D. Thesis, Department of Geomatics Engineering,
University of Calgary, Calgary, Canada, 206 p.
Banville, S. (2007). Aspects liés à la résolution des ambiguïtés de phase dans le
positionnement ponctuel de précision (PPP) par GPS. M.Sc. mémoire, Département
des sciences géomatiques, Université Laval, Québec, Canada, 149 p.
Banville, S. (2014). Improved Convergence for GNSS Precise Point Positioning. Ph.D.
Dissertation, Department of Geodesy and Geomatics Engineering, Technical Report
No. 294, University of New Brunswick, Fredericton, New Brunswick, Canada, 269 p.
BIPM (2013). Annual Report of the BIPM Time Section (Vol. 8). Technical Report,
Pavillon de Breteuil, F-92312 sèvres Cedex, France.
Boucher, C., & Altamimi, Z. (2001). ITRS, PZ-90 and WGS 84: current realizations and
the related transformation parameters. Journal of Geodesy 75(11), pp. 613-619.
Récupéré à partir de http://link.springer.com/article/10.1007/s001900100208.
Cai, C. (2009). Precise Point Positioning Using Dual-Frequency GPS and GLONASS
Measurements. Ph.D. Thesis, Department of Geomatics Engineering, University of
Calgary, Calgary, Canada, 139 p.
Chen, K. (2001). Real-time precise point positioning and its potential applications. In
Proceedings of the 17th International Technical Meeting of the Satellite Division of
The Institute of Navigation (ION GNSS 2004), pp. 1844-1854.
DRC (1908a). Department of Railways and Canals (1908-1918) The Quebec Bridge.
Report of the Government Board of Engineers, Vol. I, 259 p.
DRC (1908b). Department of Railways and Canals (1908-1918) The Quebec Bridge.
Volume II (Plates to accompany Volume I of the Report of the Government Board of
Engineers). 91 plates.
Habrich, H. (2000). Geodetic Applications of the Global Navigation Satellite System
(GLONASS) and of GLONASS/GPS Combinations. Ph.D. Thesis, University of Berne.
Heflin, M. B. (2000). Near Real Time Products from JPL, [IGSMAIL-3082].
Héroux, P. & Kouba, J. (2001). GPS Precise Point Positioning Using IGS Orbit Products.
Physics and Chemistry of the Earth, Part A: Solid Earth and Geodesy, Volume 26,
(Issues 6-8), pp. 573–578. Récupéré à partir de
http://www.sciencedirect.com/science/article/pii/S146418950100103X.](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-139-320.jpg)
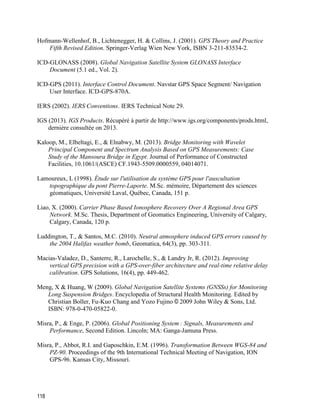

![123
13.5h ({12h-15h}/2),16.5h ({15h-18h}/2),19.5h ({18h-21h}/2), 21.5h ({21h-24h}/2)]
divisé par 24;
Statique : Matrice (392 x 6) contenant les valeurs moyennes des coordonnées et les
valeurs moyennes des conditions météorologiques pour chaque jour durant une année
complète du 1er
juillet 2012 au 27 juillet 2013.
Paramètres de sortie :
2 Graphiques pour chaque semaine dont le premier graphique représente la variation
longitudinale, transversale et verticale. Et le deuxième graphique représente les précisions
horizontales, les valeurs PDOP, les précisons verticales, les radiations solaires, le passage
des automobiles et les valeurs TEC&Kp.
À l’intérieur de cette fonction « Semaine_TBC », nous avons intégré quatre autres
fonctions :
MAT_ROT : transforme les variations de coordonnées du système de coordonnées
cartographiques (UTM : N-E-h) vers le repère local (L-T-V);
Conversion : calcule les composantes de la vitesse du vent dans le repère local du
pont de Québec;
Moving_average : « lisse » une série de valeurs exprimées en fonction du temps
(série chronologique). Elle permet d'éliminer les fluctuations les moins significatives. Deux
fenêtres ont été utilisées : à la minute (60 secondes) et aux 10 minutes (600 secondes);
Readionex : lit les fichiers IONEX qui contiennent les valeurs TEC;
TF : exécute la transformation du Fourier;
Correlation : calcule la corrélation (cross correlation).
Nous avons aussi développé une fonction « Test ». Cette fonction est gérée à partir du code
principal suivant le type de traitement (GNSS-L1&L2-QBC2, GNSS-L1-QBC2, GPS-
L1&L2-QBC2, GPS-L1&L2-PEPS, GPS-L1-PEPS, GNSS-L1&L2-PPP). Le rôle de cette
fonction est de gérer les fichiers suivant le type de traitement puis de créer les graphiques et
de calculer les moyennes et les écarts-types des précisions horizontales, verticales et des
valeurs PDOP (voir section 5.4).](https://image.slidesharecdn.com/7456bdad-f1ec-4924-98bd-82065565f04b-150707153900-lva1-app6892/85/MemoireYS-145-320.jpg)











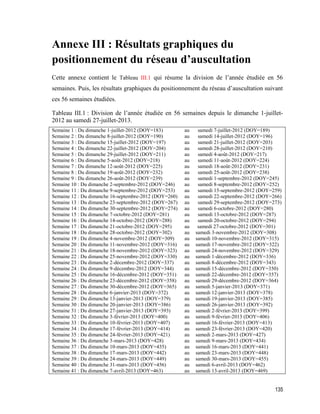












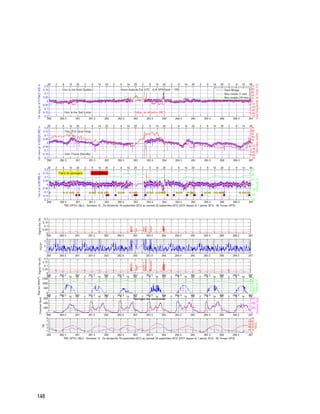













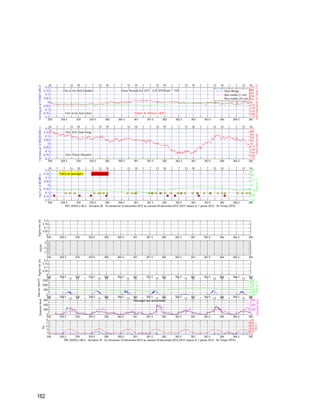





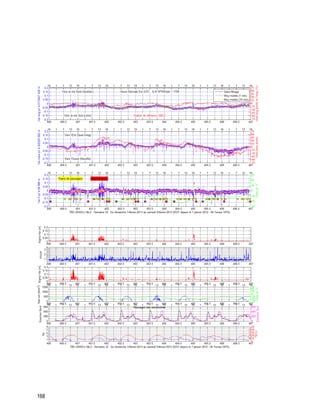

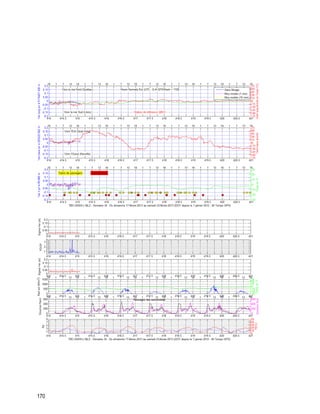









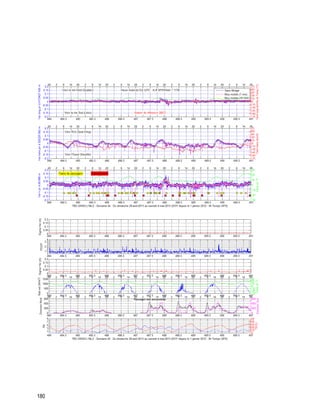



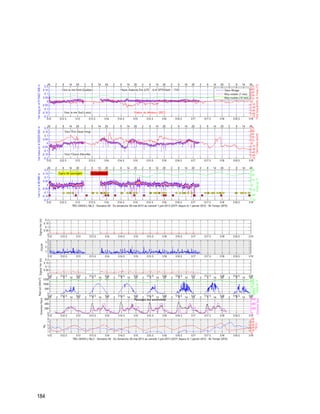





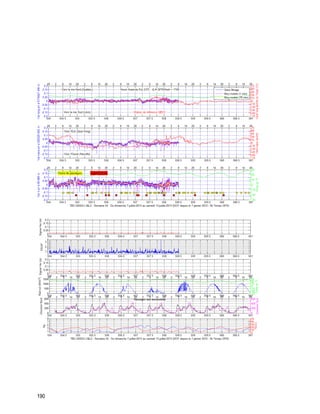




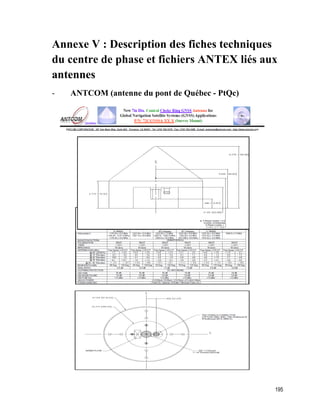








![B40 - annexe[ocr]](https://cdn.slidesharecdn.com/ss_thumbnails/b40-annexeocr-160709081351-thumbnail.jpg?width=640&height=640&fit=bounds)





























