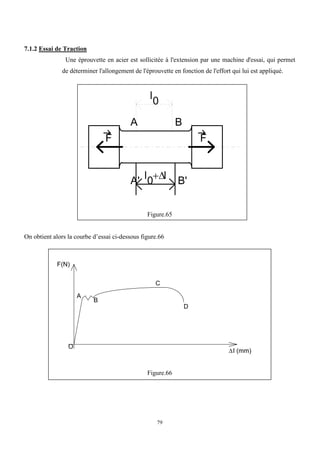
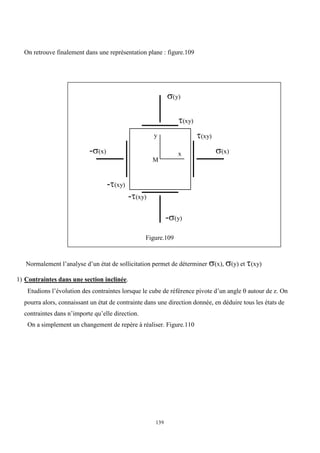
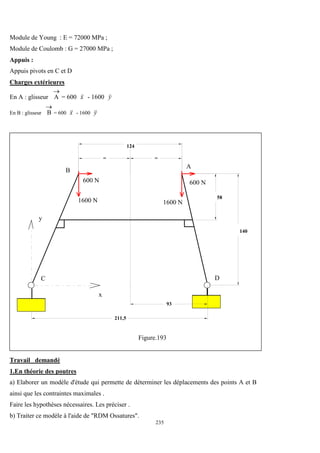
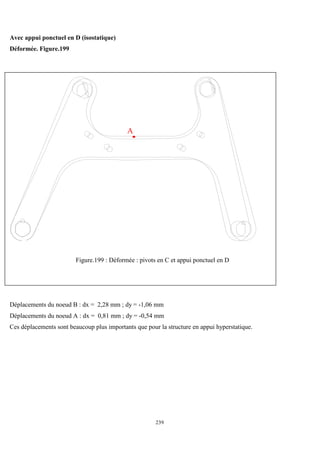
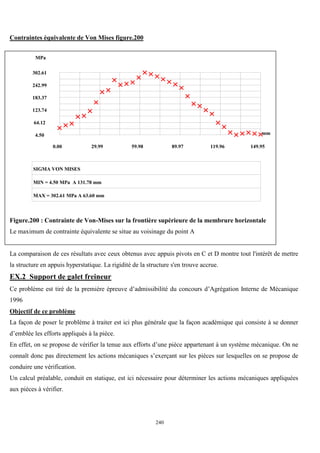
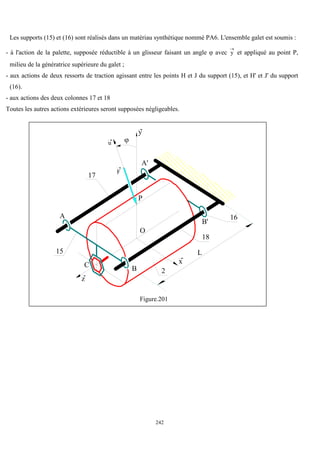
Cet ouvrage porte sur les principes fondamentaux de la résistance des matériaux, présentant des notions clés comme les tenseurs, les actions mécaniques, et divers types de sollicitations, telles que la traction, compression, et flexion. La méthodologie inclut des analyses détaillées des conditions de résistance et des vérifications nécessaires pour garantir la sécurité et optimiser le coût des pièces en question. Il est destiné aux étudiants en troisième année hydraulique, offrant une compréhension approfondie des concepts essentiels en résistance des matériaux.






![10
3. ELEMENTS VECTORIELS
En mécanique, les éléments vectoriels sont utilisés pour représenter :
les actions mécaniques
les actions 1
/
0
, A
A
les moments 1
/
0
1
/
0 ),
(
, B
B M
A
M
M
les vitesses 1
/
0
,V
V
les accélérations 1
/
0
, A
a
a
3.1. VECTEURS
1) Vecteur lié - bipoint :
On appelle bipoint AB ou (A, B) l'ensemble ordonné des deux points A et B pris dans cet ordre.
On appelle norme du bipoint AB, la valeur absolue qui définit la longueur du segment [AB] ; on
note ||AB|| ou AB
Le bipoint AB peut être défini géométriquement par:
Son origine : A;
Son support: la droite x’x;
Son sens de A vers B;
Sa norme ||AB||.
Il existe un seul représentant unique
2) Vecteur glissant
On appelle vecteur 1
/
0
A
la classe d’équivalence des bipoints équipollents dont le bipoint 1
/
0
A
est un
représentant. Fig.4
Le vecteur 1
/
0
A
peut être défini géométriquement par:
Son origine : A
Son support : la droite x’x;
Son sens de A vers x
Sa norme (intensité) || 1
/
0
A
|| ou 1
/
0
A
Unité : le Newton (N) Figure.5](https://image.slidesharecdn.com/rdm-230731075031-f05eb08a/85/RDM-pdf-10-320.jpg)