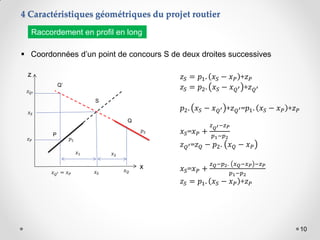
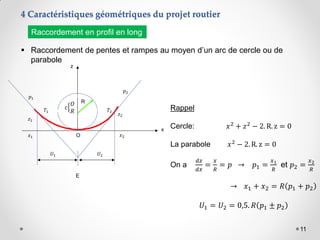
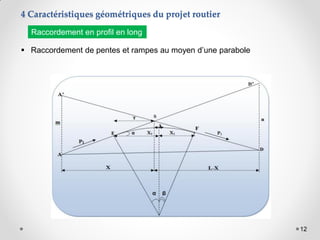
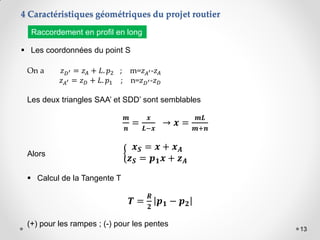
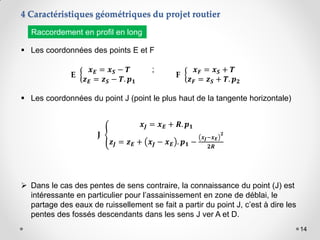
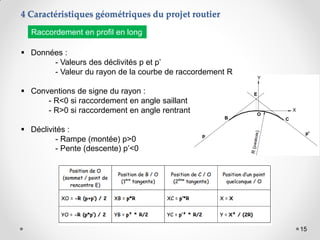
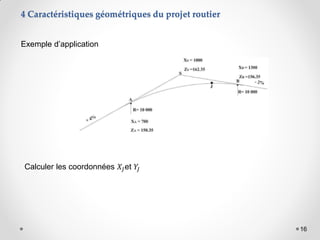
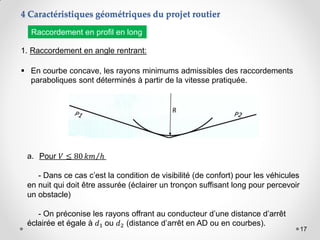
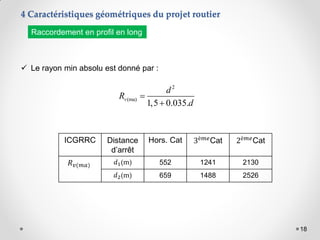
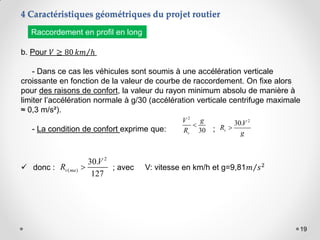
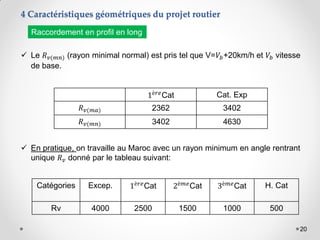
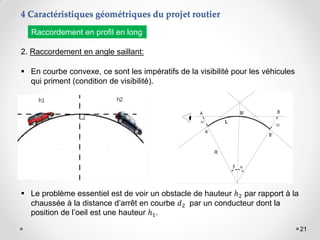
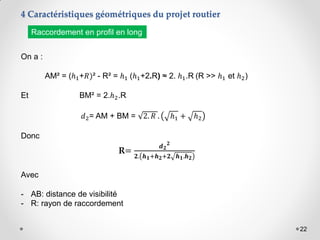
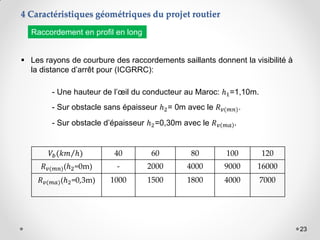
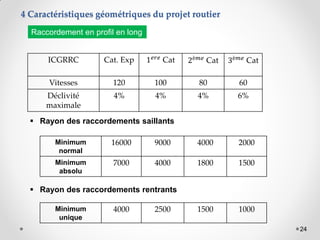
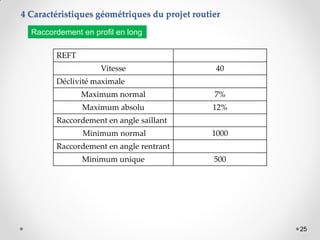
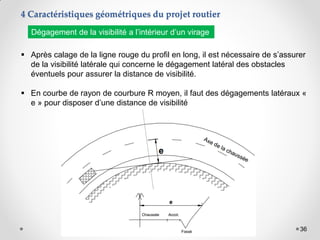
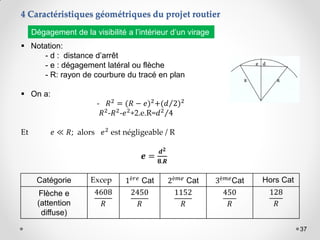
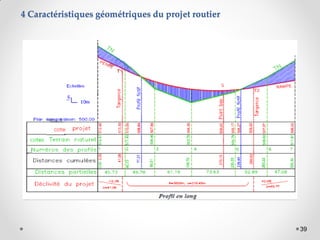
Le document traite des caractéristiques géométriques du profil en long d'une route, qui représente la variation d'altitude de l'axe routier. Il aborde les règles de raccordement entre les pentes, les déclivités maximales à respecter pour la sécurité et le confort des usagers, ainsi que l'importance d'une bonne coordination entre le tracé en plan et le profil en long. De plus, il fournit des recommandations sur les pentes minimales et les critères de visibilité pour garantir une conduite sécurisée.









![B40 - annexe[ocr]](https://cdn.slidesharecdn.com/ss_thumbnails/b40-annexeocr-160709081351-thumbnail.jpg?width=640&height=640&fit=bounds)



































![cours raspberry [Enregistrement automatique].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/coursraspberryenregistrementautomatique-260206145736-b1015531-thumbnail.jpg?width=640&height=640&fit=bounds)

