Télécharger pour lire hors ligne


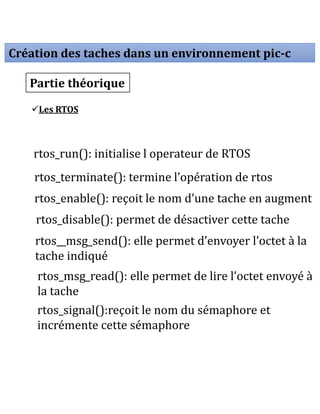
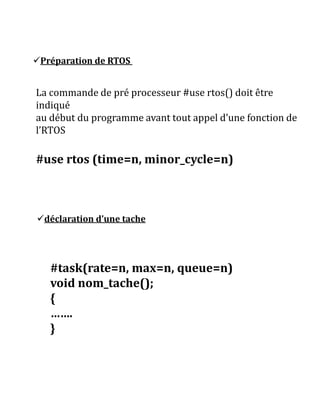


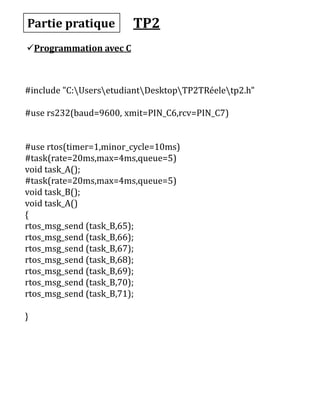
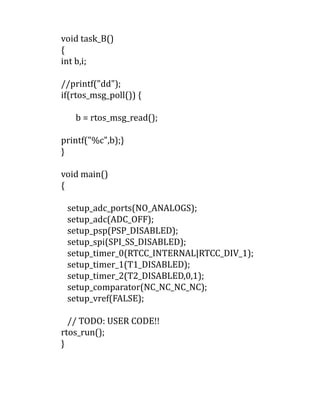

Le document présente une synthèse sur les systèmes temps réel, incluant leur définition, leurs caractéristiques, ainsi que des exemples et des techniques de programmation en multitâches, spécifiquement dans un environnement PIC-C. Il aborde également les concepts des tâches et des systèmes d'exploitation temps réel (RTOS), incluant la création et la gestion des tâches via des commandes précises en programmation C. Enfin, il propose des exercices pratiques et simulations en utilisant le logiciel ISIS.









































































