Cours capteur final
•Télécharger en tant que DOCX, PDF•
10 j'aime•23,503 vues

ce cours est destiné aux élèves de génie électrique est plus spécialement aux filière STE ,discipline sciences de l'ingenieur.N'hesiter pas à me faire parvenir vos remarques et vos critiques sur mon adresse zahidiabdo@yahoo.fr;

Recommandé
Contenu connexe
Tendances
Tendances (20)
Similaire à Cours capteur final
Similaire à Cours capteur final (20)
Cours capteur final
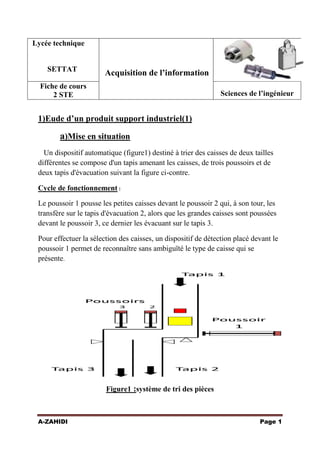
- 1. Lycée technique SETTAT Acquisition de l’information Fiche de cours 2 STE Sciences de l’ingénieur 1)Eude d’un produit support industriel(1) a)Mise en situation Un dispositif automatique (figure1) destiné à trier des caisses de deux tailles différentes se compose d'un tapis amenant les caisses, de trois poussoirs et de deux tapis d'évacuation suivant la figure ci-contre. Cycle de fonctionnement : Le poussoir 1 pousse les petites caisses devant le poussoir 2 qui, à son tour, les transfère sur le tapis d'évacuation 2, alors que les grandes caisses sont poussées devant le poussoir 3, ce dernier les évacuant sur le tapis 3. Pour effectuer la sélection des caisses, un dispositif de détection placé devant le poussoir 1 permet de reconnaître sans ambiguïté le type de caisse qui se présente. Figure1 :système de tri des pièces A-ZAHIDI Page 1
- 2. a)Situation problème : Comment reconnaitre le type(de pièce petite ou grande)devant le poussoir 1ou le poussoir2 ? b) solution constructive …………………………………………………………………………………………………………………………………………………………… ………………………………………………………………………………………………………………………………………………………….. c)Représentation fonctionnelle du système Les constituants de la chaine d’information et de la chaine d’énergie du système de la figure1 sont les suivants : Figure2 :schéma fonctionnel du système de tri 1)définition d’un capteur Un capteur est un constituant qui prélève une information sur un processus. On peut considérer que le capteur est constitué de deux parties distinctes : le corps d’épreuve qui saisie la grandeur physique, A-ZAHIDI Page 2
- 3. l’élément sensible qui convertit la grandeur physique saisie en un signal généralement électrique exploitable par l’organe de traitement, appelé aussi image informationnelle. 2)Représentation fonctionnelle d’un capteur 3)Elements constitufs d’un capteur 4)Place du capteur dans la chaine d’information A-ZAHIDI Page 3
- 4. Figure3 :Place du capteur dans la chaine d’information 5)Informations d’entrées et de sortie le processus de fonctionnement d’un système comporte différentes tâches opératives. Pour mener à bien la gestion de ces tâches, la partie commande du système doit être informée en permanence par des informations d’entrée de l’état de certains de ses constituants ou de son environnement ainsi que de l’approvisionnement en matière d’œuvre. Ces informations d’entrée sont les grandeurs physiques à acquérir par les capteurs : Pour rendre l’information de sortie exploitable, la grandeur physique est convertie en signal électrique ou pneumatique : c’est l’image informelle de la A-ZAHIDI Page 4
- 5. grandeur physique. En fonction du type de signal délivré, on distingue trois familles de capteurs. Signal Tout Ou Rien Ce sont les capteurs les plus répandus en automatisation courante : Capteur à contacts mécaniques, détecteurs de proximité, détecteur à distance ..., Ils délivrent un signal binaire (0 ou 1) dit tout ou rien. On parle de détecteurs Signal analogique Les capteurs analogiques traduisent des valeurs de positions, de pressions, de températures ... sous forme d'un signal (tension ou courant) évoluant constamment entre deux valeurs limites . On parle de capteurs A-ZAHIDI Page 5
- 6. Signal numérique Les capteurs numériques transmettent des valeurs numériques précisant des positions, des pressions,..., pouvant être lus : soit en parallèle sur plusieurs conducteurs soit en série sur un seul Figure4 :Exemple des différents types des capteurs 6)Capteur numérique 6-1)Mise en situation Dans le but d’assurer un accès aisé et conforme aux normes de sécurité des usagers des espaces publiques très fréquentés, tels que les grands magasins, on équipe de plus en plus ces espaces de portes à ouverture et fermeture automatiques 6-2) Solutions constructives adoptées (figure5) Figure5 :système d’ouverture :fermeture automatique de la porte A-ZAHIDI Page 6
- 7. 6-2)Solutions constructive pour fonction générique « Acquérir « …………………………………………………………………………………………………………………………………………………………… ……………………………………………………………………………………………………………………………………………………………. 6-3)Capteur numérique 6-3-1)Codeur incrémental Une ou deux pistes extérieures (A et B) sont divisées en N intervalles d’angles égaux alternativement opaques et transparents, N est appelée résolution ou nombre de périodes du codeur. Pour un tour complet de l'axe du codeur, le faisceau lumineux est interrompu N fois. Le signal obtenu est un signal carré qui comporte N périodes. Les pistes A et B sont décalées de manière à obtenir deux signaux déphasés de 90 ° électrique. (décalage de ¼ de période) Dans un sens, le front montant de A intervient lorsque B est à 0. Dans l’autre sens, le front montant de A intervient lorsque B est à 1. A-ZAHIDI Page 7
- 8. 6-3-2)Codeur absolu Dans ce concept, le disque comporte N pistes, chaque piste possédant son propre système de lecture (Diode émettrice et diode réceptrice). • Pour chaque position angulaire de l'axe, le codeur fournit un code binaire unique qui détermine la position de l'axe de façon absolue. Le nombre de sorties parallèles est le même que le nombre de pistes ou de bits sur le disque. Elles sont désignées par B1......Bn (Binaire naturel), G1...Gn (Code GRAY). • On montre que les défauts du codeur incrémental n'apparaissent plus avec ce type de codeur. • On peut expliquer facilement que si certaines positions ne sont pas vues par l'automate, ce n'est pas grave. En effet le codeur délivre un code image de la position. Par contre, le codeur incrémental délivre des impulsions qui doivent être comptées pour connaître la position. A-ZAHIDI Page 8
- 9. 6-2 -3)Aspect physique du capteur de la porte coulissante a) Situation problème Comment acquérir la position de la porte ? …………………………………………………………………………………… ……………………………………………………………………………………. b)Etude de la solution constructive La capture de la position se fait à l'aide d'un codeur incrémental constitué, Comme le montre la figure ci-dessous de : Un disque comportant deux pistes A et B décalées et divisées chacune, en 16 secteurs équidistants et alternativement opaques et transparents ; Deux éléments optoélectroniques (une diode infrarouge et un phototransistor) disposés de part et d’autre de chaque piste. A-ZAHIDI Page 9
- 10. Le codeur optique fournit alors deux signaux EncA et EncB déphasés entre eux de 1/4 de la période T ; ces deux signaux sont filtrés, mis en forme et compatible TTL. 1- Calculer le déplacement minimal de la courroie détectable par ce capteur sachant qu’un tour de la poulie correspond à un déplacement linéaire de la courroie de 26,66 cm. …………………………………………………………………………………… …………………………………………………………………………………… …………………………………………………………………………………… …………………………………………………………………………………… …………………………………………………………. 2- Le principe de la détermination de la position de la porte se base sur le comptage ou le décomptage des impulsions fournies par le signal EncA, suivant le sens de rotation donné par l'état du signal EncB. 2.1- Combien de tours le disque fera-t-il, pour que chaque volet de la porte parcoure sa course A-ZAHIDI Page 10
- 11. maximale qui est de 1m ? …………………………………………………………………………………… …………………………………………………………………………………… …………………………………………………………………………………… …………………………………………………………………………………… ………………………………………………………… 2.2- En déduire le nombre de bits nécessaires pour représenter la position. …………………………………………………………………………………… …………………………………………………………………………………… …………………………………………………………………………………… …………………………………………………………………………………… ………………………………………………………… 7) Classes des capteurs 7-1)Classification des mesurandes mécanique déplacement, vitesse, accélération, force, pression, masse, débit, ... électrique courant, charge, impédance, ... thermique température, flux thermique, ... magnétique champ magnétique, perméabilité, ... radiation lumière visible, rayons X, radioactivité, ... bio / chimique humidité, détection de gaz, sucre, hormones, paramètres vitaux 7-2) Capteur passif La sortie est équivalente à un dipôle passif dont l’impédance (R, L, ou C) varie avec le mesurande ; exemples résistifs: A-ZAHIDI Page 11
- 12. Le mesurande est évalué grâce à la mesure de la résistance 7-3) capteur actif La sortie du capteur est équivalente à une source de tension, de courant ou de charges. exemples : Ces capteurs actifs ont besoin d’un circuit d'adaptation pour fournir un signal électrique de mesure utilisable comme le montre la figure6. A-ZAHIDI Page 12
- 13. Figure6 :classification des capteurs 7-4)Exemples Capteurs (transducteurs) passifs capteurs résistifs capteurs inductifs capteurs capacitifs Capteurs (transducteurs) actifs capteurs piézoélectriques Principe : …………………………………………………………………………… …………………………………………………………………………… …………………………………………………………………………… …………………………………………………………………………. …………………………………………………………………………….. capteurs tachymétriques Principe …………………………………………………………………………… …………………………………………………………………………… …………………………………………………………………………… A-ZAHIDI Page 13
- 14. …………………………………………………………………………… …………………….. …………………………………………………… Exemple de capteur resistifs • capteurs potentiométriques mesure du déplacement linéaire / angulaire • jauges de déformation / contrainte mesure de déformation, force / effort, couple, pression Principe …………………………………………………………………………… …………………………………………………………………………… …………………………………………………………………………… …………………………………………………………………………… • capteurs thermiques mesure de température et de débit • capteur d‘humidité 9)Conditionneurs de capteur 8-1) - Conditionneurs de capteurs passifs But: Obtenir un signal électrique représentatif de la variation de l'impédance (Zc) sous l'influence du mesurande. Capteur résistif (exemple : sonde température PT100) a) Mesure par générateur de courant A-ZAHIDI Page 14
- 15. ………………. la mesure est directement proportionnelle à la valeur de résistance du capteur (linéarité intrinsèque de la mesure si Zi →…………. ) la tension aux bornes de la résistance est non nulle , le générateur de courant travaille à tension variable (erreur de mesure si imparfait) b) Montage élémentaire d'un générateur de courant V ref= ……………………………………… Le transistor se comporte en générateur de courant de valeur : im=…………………………………. La mesure de Rc est directement référencé à la masse c) Montage dit "potentiométrique" (diviseur de tension) A-ZAHIDI Page 15
- 16. V m =…………………….. pour ……………………….. la mesure Vm est liée à la valeur de résistance Rm par une loi non-linéaire sensibilité Rappel : ……………………………………………………………………………… ……………………………………………………………………………… Pour le montage ci-dessus on a : ………………………………. La sensibilité est maximale pour R1=Rc Elle est alors : ……………………………….. d) Montage en pont (double diviseur de tension) A-ZAHIDI Page 16
- 17. On suppose que Rg est négligeable (Vcc référence de tension stabilisée) En A :……………………. En D : ………………………… V m =V D−V A =……………………… Le pont est dit équilibré lorsque Vm = 0 R1 Rc = R2 R3Pour cette valeur des résistances, les branches droites et gauches donnent le même rapport de division de Vcc. Pour simplifier la construction, on adopte souvent R1 = R2 = R3 = Rc0 avec valeur de référence du capteur (point particulier). V m =……………………….. Etude variationnelle on suppose que Rc = Rc0+Δ R d'où : V m =…………………………………………………….. d'où : V m =…………………………….. Pour des petites variations de résistance, la réponse est quasi-linéaire : V m =……………………………………………. A-ZAHIDI Page 17
- 18. Dans le cas général, la sensibilité peut s'exprimer en fonction de α = Δ R/Rc0 : V m =…………………………………….. ……………………………………………………………………… ……………………………………………………………………… ……………………………………………………………………… Conclusion : …………………………………………………………… ……… ……………………………………………………………………… ……………………………………………………………………… ……………………………………………………………………… 8-2) - Conditionneurs de capteurs actifs a) Capteur source de tension (exemple : thermocouple) La fonction à réaliser par le conditionneur est une amplification de tension. La source Ec présente généralement une impédance de sortie Zc Le conditionneur charge cette source par sa propre impédance d'entrée. Par application de la règle du diviseur de tension, on obtient : V m=…………………… Le conditionneur doit présenter une impédance d'entrée importante devant celle de la source. Le choix dépend de la précision souhaitée. Pour une précision 1/1000, il faut un rapport d'impédance de même valeur A-ZAHIDI Page 18
- 19. Le montage à retenir est le suiveur avec gain Montage proposé : …………………………………………………………… …………………………………………………………… …………………………………………………………… …………………………………………………………… b) Capteur source de courant(exemple :phototransistor) Modèle du capteur à source de courant : Le conditionnement peut se limiter à une simple résistance calibrée Zi = R .La tension mesurée est fonction de la résistance de mesure et de l'impédance parallèle du générateur de courant. Solution acceptable pour un générateur de courant pur (Zc → ∞ ) Solution :Convertisseur courant/tension : A-ZAHIDI Page 19
- 20. Le capteur devient source de courant à tension nulle (et constante). Sa conductance parallèle n'intervient pas dans la valeur mesurée. La bande passante est largement augmentée si le capteur présente une impédance fortement capacitive V m=………………………………. c) Capteur source de charge (exemple : capteur piézoélectrique) Modèle du capteur générateur de charges : V m =…………………………….. la résistance interne d'entrée Ri introduit une décharge de la source (circuit du premier ordre) Si la décharge est trop rapide (constante de temps faible), la mesure est impossible. V m =………………………………. Un tel capteur n'est adapté que pour des mesures à valeur moyenne nulle (accélération/ vibration par exemple) Solution :Convertisseur charge/tension : amplificateur de charges Le capteur devient source de charges à tension nulle (et constante). Sa capacité parallèle n'intervient pas dans la valeur mesurée. La bande passante est largement augmentée si le capteur présente une impédance fortement capacitive A-ZAHIDI Page 20
- 21. V m=……………………. Un circuit auxiliaire est nécessaire pour assurer la compensation de la dérive de l'intégrateur Montage proposé : 8)Capteurs analogiques 8-1)Etude d’un produit support (1) a)Mise en situation Le système étudié est un chauffage domestique dans une habitation par circulation d’eau chaude dans le sol de la pièce à chauffer. La circulation de l’eau est assurée par un serpentin mis en place lors de la réalisation de la dalle puis noyé dans le béton. A-ZAHIDI Page 21
- 22. (1) Départ chauffage (16) Vase d’expansion (29) Réducteur de pression (2) Retour chauffage (17) Robinet de vidange (30) Groupe de sécurité (3) Soupape de sécurité (18) Arrivée eau froide (33) Sonde ballon e.c.s. (*) (4) Manomètre (21) Sonde extérieure (44) Thermostat de sécurité (7) Purgeur automatique (22) Sonde de chaudière (50) Disconnecteur (9) Robinet d’arrêt (23) Sonde départ vanne (51) Robinet thermostatique (10) Moteur de vanne 3 voies (26) Pompe d’e.c.s. (*) (52) Soupape différentielle (11) Pompe de circulation (27) Clapet anti-retour (*) e.c.s. = eau chaude sanitaire Figure 7 :Schéma d’une installation de chauffage (Document De Dietrich) b)Situation problème Comment acquérir la température a l’intérieur et a l’extérieur de la chambre ainsi que la température ambiante ? c)Solution constructive et justification du choix …………………………………………………………………………………………………………………………………………………………… ………………………………………………………………………………………………………………………………………………………….. …………………………………………………………………………………………………………………………………………………………… …………………………………………………………………………………………………………………………………………………………… ………………………………………………………………………………………………………………………………………………………….. …………………………………………………………………………………………………………………………………………………………… A-ZAHIDI Page 22
- 23. Figure :Schéma de princioe du chauffage au sol Compléter alors le schéma fonctionnel du système : Figure 1 : Schéma fonctionnel du système de chauffage d)Etude du capteur de température d-1)Méthodes de mesure Méthodes optiques (rayonnement spectral) A-ZAHIDI Page 23
- 24. Méthodes mécaniques (dilatation d’un solide, d’un liquide ou d’un gaz) Méthodes électriques (résistivité, fém à la jonction de matériaux de natures différentes, fréquence de résonance d’un quartz) d-2) Les thermocouples Principe du thermocouple : Si T2≠ T1→ apparition d’une tension U Figure5 :Exemple d’utilisation d’un thermocouple Différents types des thermocouples On tient compte de la température attendue pour la mesure maiségalement de l'action corrosive du milieu ambiant (atmosphère oxydante, réductive, sulfureuse, etc...) sur les constituants du couple pour arrêter son choix. Figure6 :Courbes caractéristiques pour différents thermocouples A-ZAHIDI Page 24
- 25. Figure7 :Caractéristique tension=f(température) d’un thermocouple Avantages : •Larges gammes de température : de O à 1 600 K •Robustes : résistent aux chocs et aux vibrations •Réponse rapide (ms à qq s) •Fiables et précis •Reproductibles Inconvénients : •Température de référence nécessaire •Réponse non linéaire •Faible sensibilité pour certains types de thermocouples d-3)Les capteurs à résistance métallique On a : ………………………………………………………. avec a=3.85·10-3°C-1 pour le platine (petites variations de T>0°C) Le type le plus courant, appelé «Pt100», a une résistance de 100Wà 0°C et 138,5Wà 100°C (variation quasi linéaire entre -200 et 800°C) A-ZAHIDI Page 25
- 26. Bonne stabilité chimique Temps de réponse > thermocouple La précision de la mesure dépend de la sonde mais aussi de l’électronique de détection et du couplage mécanique et thermique entre la sonde et le milieu étudié qui peut entraîner une erreur de plusieurs degrés. Figure8 :Exemple d’un thermocouple d-4)Les Les thermistances Mélanges d’oxydes métalliques. Leur résistance décroît avec la t°selon une loi du type : avec T en K. (et B entre 3000 et 5000K). Les thermistances sont généralement utilisables jusqu’à environ 300°C. Mais du fait de la forme de leur réponse, elle ne sont utilisées que sur une faible plage de température (100°C) où elles sont très sensibles (sensibilité environ 10 fois supérieure aux sondes métalliques). Figure9 : Thermistance de précision à capsule de verre e)choix du montage conditionneur pour système de chauffage A-ZAHIDI Page 26
- 27. Le montage proposé comme conditionneur du capteur de température………..est le suivant : ………………………………………………………………… ………………………………………………………………… ………………………………………………………………… ………………………………………………………………… 8-2)Etude d’un produit support(2) a) Mise en situation Le système présenté en figure 10 est un système de lavage des véhicules : A-ZAHIDI Page 27
- 28. Figure 10:Schéma descriptif du système de lavage Le système comporte essentiellement : Un portique, supportant deux rouleaux verticaux et un rouleau horizontal, entraîné par un moteur électrique à deux sens de marche : avant et arrière ; Un moteur électrique associé à un mécanisme permettant la rotation de ces trois rouleaux. Un moteur électrique pour la montée et la descente du rouleau horizontal Un capteur de proximité détectant la présence d’un véhicule ; Des capteurs de fin de courses détectant les positions : Haute du rouleau horizontal ; Avant et arrière du portique. A-ZAHIDI Page 28
- 29. Un dispositif de diffusion, constitué d’une pompe et de deux électrovannes, permettant d’arroser le véhicule avec de l’eau ou de l’eau savonnée ; Un pupitre de commande. b)Etude fonctionnelle b-1) l’actigramme A-0. Figure 11 :Actigramme A-0 du système de sechage b-2) FAST partiel A-ZAHIDI Page 29
- 30. Figure12 :FAST partiel du dispositif de séchage c)Situation problème A-ZAHIDI Page 30
- 31. On se propose d’étudier Le dispositif de séchage qui est constitué d’un turbo ventilateur et des résistances chauffantes identiques Rch afin de fournir de l’air chaud dont la température est comprise entre 40°C et 70°C. Comment détecter la température de l’air de séchage ? c)Solution constructive avec conditionneur ………………………………………………………………………… ………………………………………………………………………… ………………………………………………………………………… ……………………………………………………………………….. Compléter alors le schéma de principe du dispositif de séchage suivant : EV 1 /Figure13F F Figure13:Schéma de principe du dispositif de séchage d)Etude du capteur Le capteur de température est une thermistance à coefficient de température négatif (CTN).Sa résistance varie en fonction de la température selon la loi suivante : T et T0 sont en degré Kelvin (°K) ; R0= 10 KΩ la résistance à la température T0=298°K ; e : base du logarithme népérien ; A-ZAHIDI Page 31
- 32. β =3977 °K est un coefficient donné par le fabriquant. On rappelle que la température en degré Kelvin T(°K) = T(°C) + 273. Déterminer la valeur de R4 (CTN) qui correspondant à 70 °C. …………………………………………………………………………………… …………………………………………………………………………………… ……………………………………………………………………………………. ……………………………………………………………………………………. …………………………………………………………………………………… …………………………………………………………………………………… …………………………………………………………………………………… Donner l’expression de VB en fonction de VCC , R3 et R4. …………………………………………………………………………………… …………………………………………………………………………………… …………………………………………………………………………………… …………………………………………………………………………………… …………………………………………………………………………………… …………………………………………………………………………………… …………………………………………………………………………………… 9) Conditionnement et Electronique de mesure 9-1)Problématique Les signaux électriques issus de capteurs (thermocouples, ponts, jauges de contrainte...) sont généralement de faible niveau. Il est donc nécessaire de les amplifier pour atteindre des valeurs compatibles avec les outils de mesure modernes (chaîne de mesure numérique). La mesure doit être significative, même en environnement perturbé (perturbations électriques, thermique, lumineuse, autre grandeur d'influence...). La technique de conditionnement peut participer au rejet des perturbations et grandeurs d'influence. 9-2)Conditionnement du signal du capteur Pour adapter le signal issu du capteur à la chaine de mesure ;il faut donc l’amplifier et le filtrer c’est le rôle de l’étage de conditionnement du signal du capteur 9-2-1) Amplification a)Cas du capteur actif A-ZAHIDI Page 32
- 33. Les capteurs actifs fournissent un signal électrique par définition même. Les grandeurs usuelles sont : - tension généralement de qques millivolts - courant en uA ou mA - charge électrique La mesure est une conversion de la grandeur en tension sans perturbation du phénomène source. b)Cas du capteur passif Les capteurs passifs demandent une source d'excitation (continue ou alternative) pour mettre en évidence la propriété électrique (variation de résistance, de capacité, d'inductance, de couplage...) c)Représentation et modélisation de le fonction amplification c – 1 – Fonction de transfert Définition : ……………………………………………………………………………………………………………………… ……………………………………………………………………………………………………………………… Description des grandeurs d’entrée et de sortie de la fonction amplification : VE est la tension d’entrée IE est le courant d’entrée A-ZAHIDI Page 33
- 34. VS est la tension de sortie IS est le courant de sortie Suivant les grandeurs électriques considérées en entrée et en sortie, on définit : une amplification en tension notée Av et définie telle que : …………………………………………………………………………….. une amplification en courant notée Ai et définie telle que : ……………………………………………………………………………. c – 2 ) Fonction amplification Définition : ……………………………………………………………………………………………………………………… ……………………………………………………………………………………………………………………… …………………………………………………………………………………………………………………….. c-2-1) Amplificateur non inverseur et inverseur : Il reçoit en entrée une tension VE et fournie en sortie une tension VS telle que : …………………………………………………………………………………… AV est une grandeur algébrique (pouvant être positive ou négative) sans unité : Si AV > 0 : ………………………………………………………………………..................... AV < 0 : ……………………………………………………………………………………. c– 2 – 2 – Amplificateur sommateur : Il reçoit en entrée deux tensions VE1 et VE2, et fournie en sortie une tension VS telle que : …………………………………………… A-ZAHIDI Page 34
- 35. AV est une grandeur algébrique (pouvant être positive ou négative) sans unité : Si AV > 0 la fonction réalisée est un amplificateur sommateur …………………………………………………………………………………. Si AV < 0 la fonction réalisée est un amplificateur sommateur …………………………………………………………………………………. c– 2 – 3 – Amplificateur de différence : Il reçoit en entrée deux tensions VE1 et VE2, et fournie en sortie une tension VS telle que : ……………………………… AV est une grandeur sans unité, et le changement de signe du coefficient AV ne modifie pas la fonction réalisée. d)Réalisation de la fonction d’amplification Pour produire en pratique un montage électronique réalisant la fonction amplification plusieurs solutions sont possibles. Pour un amplificateur de tension devant délivrer un faible courant à sa sortie (moins de 500 mA), l’utilisation d’un A.L.I. (Amplificateur Linéaire Intégré) est aujourd’hui la solution la plus répandue. d-1) L’amplificateur linéaire intégré (A.L.I.) Un Amplificateur Linéaire Intégré (noté A.L.I. en abrégé) est un composant électronique généralement disponible sous forme d’un circuit intégré à 8 bornes (voir ci-contre). L’ergo présent sur le dessus du circuit intégré permet de repérer chacune des bornes qui sont numérotés de 1 à 8. Pour connaître le brochage exact d’un circuit intégré il faudra consulter sa documentation (disponible par exemple dans le Mémotech pour les circuits usuels).Circuit intégré à 8 bornes Lorsqu’on recherche un A.L.I., plusieurs références de circuits intégrés existent, et parmi les plus fréquemment utilisés on peut citer : _ le circuit LM741 (1 A.L.I dans un circuit intégré 8 bornes) _ le circuit LM324 (4 A.L.I dans un circuit intégré 14 bornes) _ le circuit TL081 (1 A.L.I dans un circuit intégré 8 bornes) A-ZAHIDI Page 35
- 36. _ le circuit TL084 (4 A.L.I dans un circuit intégré 14 bornes) d – 2 ) Les différents montages à A.L.I. réalisant la fonction amplification Dans tous les montages suivants l’A.L.I. fonctionne en régime linéaire. Cela signifie que la sortie Vs de l’A.L.I peut prendre toutes les valeurs possibles entre –Vcc et +Vcc (et non seulement 2 valeurs comme cela est le cas en mode comparateur). Sur un schéma électronique, on reconnaît que l’A.L.I. fonctionne en régime linéaire lorsqu’il y a une contre-réaction reliant la sortie de l’A.L.I. à son entrée inverseuse (c’est-à-dire à l’entrée « moins »). Cette contre-réaction est généralement réalisée par une résistance. Lorsqu’un A.L.I. fonctionne en régime linéaire, les tensions présentes sur chacune de ses deux entrées sont identiques, ce qui s’écrit V+ = V–. d – 2 – 1) Le montage suiveur Schéma : Fonction de transfert : ……………………………………………………………………………………. Remarque : ……………………………………………………………………………………. ……………………………………………………………………………………. d – 2 –2 ) Le montage amplificateur inverseur Schéma : A-ZAHIDI Page 36
- 37. Fonction de transfert : ……………………………………………………………………………………. Remarque : …………………………………………………………………………………… ……………………………………………………………………………………. d – 2 – 3) Le montage amplificateur non inverseur Schéma : Fonction de transfert : …………………………………………………………………………………… Remarque : …………………………………………………………………………………… …………………………………………………………………………………… d – 2 –4) Le montage amplificateur sommateur inverseur Schéma : Fonction de transfert : …………………………………………………………………………………… A-ZAHIDI Page 37
- 38. Remarque : …………………………………………………………………………………… …………………………………………………………………………………… d- 2 – 5) Le montage amplificateur sommateur non inversuer Schéma : Fonction de transfert : ……………………………………………………………………………………. Remarque : ……………………………………………………………………………………………………………………… ……………………………………………………………………………………………………………………… d– 2 – 6 ) Le montage amplificateur de différence Schéma : Fonction de transfert : ……………………………………………………………………………………. Remarque : ……………………………………………………………………………………………………………………… ……………………………………………………………………………………………………………………… e)Exemples d’application e-1)Système de lavage automatique des véhicules Problématique : Le signal utile (signal délivré par le circuit de conditionnement du capteur est une différence de potentiel entre deux points, alors que les outils de mesure usuels(amplificateur opérationnel) évaluent le potentiel par rapport à une A-ZAHIDI Page 38
- 39. référence imposée appelée masse .il faut donc prévoir un amplificateur de différence,d’ou le montage de la figure13. Figure 13 :schéma du commande de séchage e-1-1)Etude du bloc 2: Amplificateur de différence 1- Donner l’expression de Vs1 en fonction de VA, R5 et R6. …………………………………………………………………………………… ………………………………………………………………………………… 2- Donner l’expression de Vs2 en fonction de Vs1,VB, R7 et R8 …………………………………………………………………………………… ……………………………………………………………………………………. 3- Sachant que : . Déterminer VS2 en fonction de UAB , en déduire alors les valeurs de VS2 correspondantes à 40°C et à 70°C. [3 pts] …………………………………………………………………………………… …………………………………………………………………………………… ……………………………………………………………………………………. e-2)Etude d’une Éolienne (Aérogénérateur) A-ZAHIDI Page 39
- 40. e-2-1) Définition d’une éolienne une éolienne ou aérogénérateur est un système qui permet de produire de l'énergie électrique à partir de l’énergie cinétique du vent. e-2-2)Description L’éolienne est principalement constituée : (figures 14) d’une Hélice tripale (trois pales), d’un multiplicateur de vitesse intégrant un frein à disque à manque de courant, d’un alternateur triphasé GS, d’un système (non représenté) permettant d’orienter la nacelle et les pales, d'un mât qui soutient l'éolienne, d'une girouette et d'un anémomètre, situés sur le toit de la nacelle, fournissent les informations nécessaires pour orienter correctement l’éolienne de façon automatique : l'anémomètre capte la vitesse du vent tandis que la girouette en détecte la direction, d’un système électronique de commande et de contrôle à base d’un module logique programmable Zelio modèle SR2 B121BD gérant l’ensemble. A-ZAHIDI Page 40
- 41. Figure 14 :Structure d’une éolienne e-2-3)Analyse fonctionnelle On propose d'appliquer quelques outils de l’analyse fonctionnelle à l’aérogénérateur Tâche 1 : Expression du besoin Compléter le diagramme bête à cornes. A-ZAHIDI Page 41
- 42. . Tâche 2 : Identification des solutions constructives. 2: Compléter le FAST partiel de l'éolienne en précisant les solutions constructives adoptées. A-ZAHIDI Page 42
- 43. e-2-4) Étude de la commande du frein Tâche 1 : Acquisition de la vitesse du vent. Pour acquérir la vitesse du vent, on a utilisé un anémomètre qui délivre à sa sortie une tension UAn proportionnelle à la vitesse du vent (figure 15). Figure 15 :Structure simplifiée de l'anémomètre Sous l'effet du vent, les godets de l'anémomètre tournent et entrainent un tambour sur lequel est fixé un aimant qui ferme un circuit à chaque passage devant l'ILS (Interrupteur à Lames Souples). On récupère alors un signal carré u1 dont la fréquence varie avec la vitesse du vent. Le signal u1 est appliqué à l'étage A qui le transforme en un signal sinusoïdal u2 de même fréquence. Figure16 Figure 16 La tension u2 est ensuite appliquée à un circuit de conversion fréquence/tension constitué de deux étages B et C. A-ZAHIDI Page 43
- 44. Figure 17 :Circuit du déphaseur Remarque : les amplificateurs opérationnels fonctionnent en régime linéaire, sont considérés parfaits et alimentés en ± 15V. 1: Exprimer I1 en fonction de U2, U3 et R. …………………………………………………………………………………… …………………………………………………………………………………… ………………………… 2: Exprimer V - (V - : Tension de l'entrée inverseuse de l'amplificateur opérationnel par rapport à la masse) en fonction de U2 et U3. …………………………………………………………………………………… …………………………………………………………………………………… 3: Exprimer V + (V + : Tension de l'entrée non inverseuse de l'amplificateur opérationnel par rapport à la masse) en fonction de U2, ZC et R. ………………………………………………………………………………………………… ………………………………………………………………………………………………… 4: ZC étant l'impédance complexe du condensateur C : montrer que la fonction de transfert T s'écrit : ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… A-ZAHIDI Page 44
- 45. Les signaux U2 et U3 sont appliqués aux entrées de l'étage C (figure : 18) qui délivre à sa sortie le signal sinusoïdal u4 dont l'amplitude varie avec la fréquence de u1, donc avec la vitesse du vent. Il suffit alors de redresser u4, de l'adapter et de récupérer sa valeur moyenne (fonctions réalisées par l'étage D) Figure18 :Montage de l’étage2 5: Donner l'expression de U4 en fonction de U2 et U3. …………………………………………………………………………………… ……………………………………………………………………………………. 6: Montrer que la fonction de transfert peut s'écrire sous la forme : Tâche 2 : Commande du frein. On rappelle que le frein n'est actif que lorsque la vitesse du vent est inférieure à Vmin = 4,7 m/s ou supérieure à Vmax = 24,7 m/s. A-ZAHIDI Page 45
- 46. La tension UAn délivrée par l'anémomètre est liée à la vitesse du vent par la relation : UAn = k.v, avec k = 0,34 V.s/m coefficient de linéarité, et v : vitesse du vent en m/s. 7: Calculer alors les valeurs des seuils UAn_MIN et UAn_MAX de la tension UAn. …………………………………………………………………………………… …………………………………………………………………………………… …………………………………………………………………………………… Si la vitesse du vent est trop faible (inférieur à 4,7 m/s) ou trop grande (supérieure à 24,7 m/s), on lance une temporisation de 30 secondes. Passé ce délai, si la vitesse du vent revient à sa valeur normale (comprise entre 4,7 et 24,7 m/s) on laisse tourner les pales, sinon le frein arrête l’éolienne. On précise que la tension UAn est directement appliquée à l'entrée IE du module logique Zelio. C'est ainsi que l'entrée IE est utilisée en tant qu'entrée analogique : le contact A1 (A1 : bit interne de l'automate) reste fermé tant que UAn reste comprise entre UAn_MIN et UAn_MAX. (UAn_MIN ≤ UAn ≤UAn_MAX) c’est-à dire tant que 4,7 m/s ≤ v ≤ 24,7 m/s. 8: En vous aidant des données des documents ressources du figure 20 cidessous, compléter le programme à contacts figure 19 de la commande du frein. Figure 19 :programme à contact de la commande du frein A-ZAHIDI Page 46
- 47. Figure 20 :Document ressources de API zélio SR2 B121BD A-ZAHIDI Page 47
- 48. 2-9-2)Filtrage a)Problématique Comment atténuer l’effet de bruit causé par la ligne (230 V AC, 50 Hz). Reliant le capteur de soleil à la carte électronique du système ? b) Solution constructive (figure 21) …………………………………………………………………………… …………………………………………………………………………… …………………………………………………………………………… figure 21 :Schéma du montage d’acquisition du soleil du store , c)Etude des filtres c-1) Présentation L’information issu d’un capteur quelle soit numérique ou analogique peut être perturbée, bruitée. Pour exemple la mesure de vitesse d’une machine à courant continu au moyen d’une dynamo tachymétrique. Le filtrage des grandeurs mesurées permet d’obtenir un signal épuré mais on introduit un retard dans le traitement de l’information. Les filtres sont classés en deux familles : Les filtres passifs : exclusivement composés de résistances, condensateurs, inductances. Inconvénient : Aucune amplification possible Les filtres actifs: composés de résistances, condensateurs, inductances et AOP A-ZAHIDI Page 48
- 49. Avantage : Amplification possible c-2) Caractéristiques Les filtres quoique classés en deux familles sont aussi classés par caractéristiques: les filtres passe-bas : Qui ne laissent passer que les signaux de basses fréquences (exemple les sons graves) les filtres passe-haut : Qui ne laissent passer que les signaux de hautes fréquences (exemple les sons aigus) -les filtres passe-bande : Qui ne laissent passer les signaux que d’une gamme de fréquences (exemple les sons médiums) les filtres coupe-bande : Qui ne bloquent qu’une gamme de fréquences. Remarques : L'avantage des filtres actifs par rapport aux filtres passifs se situe aux basses fréquences. La présence d'un amplificateur opérationnel diminue le volume des condensateurs, supprime les inductances et permet de compenser l'atténuation importante des signaux due aux circuits passifs. c-3) Méthode d’étude des filtres Pour étudier un filtre il faut connaître quelques outils mathématiques tels que : Les complexes La méthode de LAPLACE L'étude d'un filtre se fait à partir des équations électriques du filtre, de la fonction de transfert (Vs/Ve) et d'une interprétation graphique, le diagramme de BODE (ou asymptotique), et du diagramme de phase. Dans cette représentation de BODE on retrouve le gain exprimé en dB et la phase exprimée en ° en fonction du signal f ou sa pulsation (ou en fonction de la fréquence réduite f/fo ou encore de la pulsation réduite w/wo) c-4) Composants et complexes: Les composants , résistances, inductances, condensateurs, peuvent être représentés dans le plan complexe. La loi d’ohm s’écrit alors :U = Z x I - pour une résistance Zr =R - pour un condensateur Zc =1/jCw - pour une inductance Zl =jLw ou "j" est l'expression du nombre complexe, et w=2πf avec f fréquence du signal. remarque : Z = a + jb = Ze↑jθ = Z(cosθ + jsinθ) ou Z est le module en Ω A-ZAHIDI Page 49
- 50. et θ est l’argument en °. c-5) Exemple dc’étude: (le filtre passe bas) : Soit le schéma suivant : 1) En admettant que R est un récepteur d'impédance Z1et C un récepteur l'impédance Z2, exprimer Vs en fonction de Ve, Z1, Z2 …………………………………………………………………… 2) Mettre la fonction de transfert Vs/Ve sous la forme : …………………………………………………………………………………. 3) ) On appellera wo =1/RC pulsation de coupure. C’est la fréquence à partir de laquelle le signal d’entrée commence à être atténué (passe bas) ou le contraire (filtre passe haut…) ,On en déduit le gain de la fonction de transfert, qui est le module de celle-ci. ……………………………………………………………………………………………….. 4) Pour que sa représentation graphique soit facile on utilise comme unité le décibel. Le gain s’écrit alors 20 log G (log décimal) Et l’expression de l’argument (la phase) en toujours en degré. Calculer le module de G, puis son argument ? Comment réagit le gain si W <<W0 , si W>>W0 ? …………………………………………………………………………………… …………………………………………………………………………………… 5) Représentation graphique du gain et de la phase : Remarque : ECHELLE LOGARITHMIQUE L’étude des filtres se fait sur une gamme étendue de la fréquence, pour pouvoir observer la caractéristique on utilise une échelle log décimal D’ou l’unité en abscisse s’exprime sous la forme log ω A-ZAHIDI Page 50
- 51. c-6)Etude des différentes filtres c-6-1)filtre passe bas du 1er ordre A-ZAHIDI Page 51
- 52. c c-6-2)filtre passe haut du 1er ordre C-6-3 .Etude qualitative des filtres passe-bande et coupe-bande : Ces deux filtres, dont l’étude quantitative serait moins évidente que celle effectuée précédemment, permettent : A-ZAHIDI Page 52
- 53. De privilégier une bande de fréquence (comprise entre fb, la fréquence basse et fh,la fréquence haute) dans le cas du filtre passe-bande, D’atténuer une bande de fréquence dans le cas du filtre coupe-bande. c-6-4)Application a)Exercice1 On se propose d’étudier la structure ci-dessous : A-ZAHIDI Page 53
- 54. a) Donner la nature des filtres 1 et 2. …………………………………………………………………………….. b) Donner le régime de fonctionnement de l’A OP. Ainsi câblé, quelle est sa fonction ? ……………………………………………………………………………. c) T1 étant la transmittance du filtre 1, T2 celle du filtre 2, Donner la transmittance Vs/Ve en fonction de T1 et T2. …………………………………………………………………………… d) Proposer un diagramme asymptotique de gain de l’ensemble. e) Donner la nature du filtre ainsi constitué. …………………………………………………………………………… A-ZAHIDI Page 54
- 55. b)Exercice2( Etdue système pluritechnique store automatisé) Tache 1 :Conditionnement du capteur de soleil Dans cette situation, seule l’acquisition de l’information« Soleil » est étudiée. Le capteur soleil du store est constitué d’une photodiode ;on note qu’une photodiode est une diode dont le courant inverse augmente en fonction de l’éclairement ; le graphique ci-dessous donne la courbe de réponse de ce capteur. Le tableau ci-dessous donne la mesure de l’éclairement de quelques exemples de situations ; on rappelle que le « lux » est l’unité de mesure de la quantité de lumière reçue par une surface, d'une manière uniformément répartie. Le schéma suivant Le bloc 1du montage du figure 22 représente le montage de conditionnement du capteur du soleil Le bloc 1 est un convertisseur courant/tension, qui permet d’obtenir aux bornes de la résistance R21 une tension image de l’intensité lumineuse. 1- Exprimer V1 en fonction de IS ; on suppose que le courant dans R22 est négligeable. 2- Donner la valeur de V1 correspondante aux 2 valeurs extrêmes contenues dans la courbe (0 et 55 Klux) . A-ZAHIDI Page 55
- 56. Figure22 :Carte d’acquisition du soleil dans le store Tâche2 :Conditionnement du signal du capteur Le bloc 2 du montage d’acquisition du soleil du store (figure 21) est un filtre passe-bas passif permettant d’atténuer l’effet de bruit causé par la ligne (230 V AC, 50 Hz). 1) Donner l’expression complexe de la fonction de transfert de ce filtre et la mettre sous la forme suivante tout en précisant l’expression de f0ainsi que sa valeur numérique. 2) Esquisser l’allure (diagramme de Bode asymptotique) du gain AvdB A-ZAHIDI Page 56
- 57. Figure 23 :Carte d’acquisition du soleil dans le store 2-9-3)les comparateurs a)Problématique En mode automatique, L’intensité des rayons solaires est captée par une photodiode ; si la lumière solaire dépasse un certain seuil d'intensité réglable, le store descend ;il faut donc prévoir un montage permettant de comparer l’éclairement mesuré à un seuil préréglé, ce montage doit posséder deux seuils A-ZAHIDI Page 57
- 58. de basculement pour un va et vient incessant du store par des petites variations de l’éclairement au voisinage du seuil préréglé. b)Solution constructive …………………………………………………………………………………… ……………………………………………………………………………………. c) Définition : La fonction comparer permet de situer un signal d’entrée par rapport à une valeur de consigne (seuil) préalablement fixée, ou à un autre signal d’entrée. La sortie de la fonction ne prend que deux valeurs distinctes. La fonction comparer peut par exemple se définir comme suit : d) Utilisation de comparateurs intégrés On utilise les A.I.L. (Amplificateurs Intégrés Linéaires) pour réaliser des montages comparateurs. Ces A.I.L sont utilisés en régime de saturation lorsque la sortie n’est pas rebouclée sur l’entrée non inverseuse (-). A-ZAHIDI Page 58
- 59. L'amplificateur est un composant actif : il faut donc lui fournir de l'énergie; on utilise pour ce faire deux alimentations +Vcc et -Vcc. On note : e+ le potentiel de la borne "+". e - le potentiel de la borne "-". i+ et i- les courants rentrant par les bornes "+" et "-". Ces courants seront négligés dans toutes nos applications e – Les comparateurs à simple seuil Il existe deux versions du comparateur de tension à simple seuil : Le comparateur non-inverseur Le comparateur inverseur e-1) Le comparateur non-inverseur à simple seuil Schéma du comparateur non-inverseur : L’entrée VE du comparateur est reliée à l’entrée NON-INVERSEUSE de l’A.L.I., et la tension de référence constante Vref est connectée à l’entrée INVERSEUSE de l’A.L.I. Conditions de basculement : …………………………………………………………………………… …………………………………………………………………………… Caractéristique VS=f(VE) du comparateur non-inverseur : A-ZAHIDI Page 59
- 60. e-2) Le comparateur inverseur à simple seuil Schéma du comparateur inverseur : Cette fois l’entrée VE du comparateur est reliée à l’entrée INVERSEUSE de l’A.L.I., et la tension de référence constante Vref est connectée à l’entrée NONINVERSEUSE de l’A.L.I. Conditions de basculement : …………………………………………………………………………… …………………………………………………………………………….. Caractéristique VS=f(VE) du comparateur inverseur : f) Comparateur à double seuils Il existe deux types de comparateurs à double seuil : Les comparateurs à fenêtre Les comparateurs à hystérésis Un comparateur est caractérisé par sa caractéristique de transfert VS=f(VE), car on ne peut pas exprimer la sortie VS en fonction de l’entrée VE par une fonction mathématique simple. Dans le cas du comparateur à hystérésis, la caractéristique de transfert VS=f(VE) est appelée cycle d’hystérésis. Pour être valable, un cycle d’hystérésis doit toujours être orienté, c’est à dire qu’on doit y faire apparaître le sens de f-1) Le comparateur à fenêtre à deux niveaux de sortie A-ZAHIDI Page 60
- 61. Schéma de base du comparateur à fenêtre à deux niveaux de sortie : Les A.L.I. sont ici alimentés avec une alimentation simple (VALIM1>0V et VALIM2=0V) tout comme la porte logique. On supposera que les deux niveaux de tension en sortie de la porte logique sont VALIM1 et 0V (porte logique parfaite, sans tension de déchet). Remarque : …………………………………………………………………………………… Conditions de basculement : Caractéristique VS=f(VE) du comparateur à fenêtre à deux niveaux de sortie : f- 2 – Les comparateurs à hystérésis Ce type de comparateur est aussi appelé Trigger de Schmitt.Il existe euxversions du comparateur à hystérésis : Le montage Trigger non-inverseur Le montage Trigger inverseur Caractéristiques communes aux deux montages : …………………………………………………………………………………………………………… …………………………………………………………………………………………………………… …………………………………………………………………………………………………………… A-ZAHIDI Page 61
- 62. …………………………………………………………………………………………………………… ………………………………………………………………………………………………………… Définition des seuils VBH et VHB : VBH est la valeur à appliquer sur VE, afin d’obtenir V+=V– (basculement du comparateur), lorsque la sortie VS a comme valeur VSAT2 (niveau BAS). VHB est la valeur à appliquer sur VE, afin d’obtenir V+=V– (basculement du comparateur), lorsque la sortie VS a comme valeur VSAT1 (niveau HAUT). Dans les deux montages qui suivent, les A.L.I. sont alimentés en symétrique (VALIM1=-VALIM2). f-2-1) Le montage Trigger non inverseur Schéma du Trigger non-inverseur à A.L.I. : Calcul des seuils VBH et VHB : VBH ……………………………………………………………………… VHB ……………………………………………………………………… Chronogrammes des signaux VE et VS : A-ZAHIDI Page 62
- 63. Cycle d’hystérésis du montage Trigger noninverseur Remarques sur le montage Trigger noninverseur …………………………………………………………………………………………………………...... …………………………………………………………………………………………………………….. ………………………………………………………………………………………………………………………. ………………………………………………………………………………………………………………………. f– 2 – 2 – Le montage Trigger inverseur Schéma du Trigger inverseur à A.L.I. : Calcul des seuils VBH et VHB : VBH ……………………………………………………………………… VHB ……………………………………………………………………… Chronogrammes des signaux VE et VS : A-ZAHIDI Page 63
- 64. Cycle d’hystérésis du montage Trigger inverseur : Remarques sur le montage Trigger inverseur : …………………………………………………………………………………………………………….. …………………………………………………………………………………………………………….. ……………………………………………………………………………………………………………. …………………………………………………………………………………………………………….. f-3) Application(1) Etude du bloc 3 de la carte d’acquisition du soleil du store Le bloc 3 est un comparateur à 2 seuils (Trigger de Schmitt), réalisé autour d’ALI; il permet de comparer l’éclairement mesuré à un seuil préréglé par un potentiométre P2 ; si ce seuil est dépassé, la sortie du comparateur bascule à 0 ; l’hystérésis de ce comparateur permet d’éviter un va et vient incessant du store par des petites variations de l’éclairement au voisinage du seuil préréglé. A-ZAHIDI Page 64
- 65. a)Proposer un montage pour ce comparateur et compléter alors le schéma de la carte d’acquisition ci- dessous c) Calculer la valeur maximale du seuil haut VSH de ce comparateur, sachant qu’elle est calculée pour V3 à Vcc (12 V) etle curseur de P2 en position haute, Etude du bloc4 da la carte d’acquisition du soleil Le bloc 4 (D10, P5, C13) lance une temporisation dès qu’il y a présence de soleil (dépassement de seuil). Cette temporisation permet d’ignorer les basculements du comparateur au passage de nuages dispersés (variation importante d’éclairement mais de petite durée). Avant l’atteinte de seuil de basculement préréglé par P2, V3 est à Vcc, ce qui permet à C13 de se charger rapidement à travers la diode D10, considérée comme un contact fermé (figure a ci-dessous). Lorsque le seuil est atteint, V3 bascule à 0 et C13 se décharge alors à travers P5 (figure b ci-dessous). V4 diminue exponentiellement jusqu’à 0 ; lorsque V4 atteint, à un certain temps t1, Vcc/2, la sortie de la porte logique inverseuse CMOS P du bloc 5 bascule du niveau logique 0 au niveau logique 1. On note que la porte P est alimentée par Vcc égale à 12 V. A-ZAHIDI Page 65
- 66. La loi d’évolution de V4 est de la forme suivante, où t0 représente l’instant du début de la décharge : a) b) Montrer alors que l’expression de la durée TW au bout de laquelle V4 atteint la valeur Vcc/2 est de la forme : Sachant que P5 est variable, calculer la valeur maximale de TW A-ZAHIDI Page 66
- 67. f-4) Application(2) Etude du Bloc3: 3.1- Quelle est la fonction de ce bloc ? ………………………………………………………………………………….. 3.2- Sachant que les valeurs des tensions de seuil : VSB (seuil bas)= 3,68 V et VSH (seuil haut) = 8,48 V,tracer la fonction de transfert VS3 =f(VS2) ; en déduire alors la caractéristique VS3 =f(T),la température T est en °C. Bloc4: Interface de sortie 4.1-Reproduire et compléter sur feuille d’examen le tableau suivant : A-ZAHIDI Page 67
- 68. C)Etude de la commande de vitesse de la porte automatique c-1) Problématique Sachant que la vitesse de la porte doit être changée à partir de 1 /4 de la course maximale, comment donc peut –on agir sur la vitesse du moteur à partir du microcontrôleur ? c-2)Solution ( figure 24) ………………………………………………………………………………………………………………………………………………… ……………………………………………………………………………………………………………………………………………….. …………………………………………………………………………………………………………………………………………………. figure 24 :solutions constructives adoptées pour porte automatique C-3) Etude des convertisseurs numériques /analogiques C-3-1)Définition. Un convertisseur Numérique/Analogique est un circuit hybride qui, à une information numérique d’entrée N codé suivant un certain protocole, fait correspondre en sortie un signal analogique S. N représente le « mot binaire » codé sur n bits. S représente le signal de sortie. C-3-2) Quantum : Le quantum noté q correspond à la quantité élémentaire de variation du signal de sortie. On appelle aussi « pas » de progression ou incrément de sortie C-3-3) Résolution : La résolution est donnée par le nombre de bits n que le convertisseur peut accepter sur ses entrées (caractérise le mot N à convertir). C’est le rapport q/PE A-ZAHIDI Page 68
- 69. en % ( PE étant la pleine échelle,valeur analogique max. que peut prendre le convertisseur) C-3-4) Exemple de convertisseur : La table de vérité est la suivante c-3-5) CNA à réseau R-2R: c-3-5-1). Schéma de principe : c-3-5-2). Principe : Ce type de CNA n’utilise que deux valeurs de résistances. Les commutateurs sont commandés par le code numérique. La valeur analogique est la somme des courants aboutissant a l’entrée " - " de l’amplificateur opérationnel qui traduit le courant en tension. c-3-5-3. Fonctionnement : A-ZAHIDI Page 69
- 70. Chaque commutateur (C0, C1, C2) peut être relié à la masse (position " 0 "), soit à la tension Vref (position " 1). ………………………………………………………………………………………………………………: ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… ………………………………………………………………………………………………… …………………………………………………………………………………….................... A-ZAHIDI Page 70
- 71. c-3-5-4)Application :Etude la commande du moteur da la porte automatique Le schéma de principe du système est donné en figure 25, Le moteur MCC est alimenté par une tension variant entre 0 et 10V, par l'intermédiaire d’un convertisseur numérique/analogique (CNA) associé au microcontrôleur (μC) qui servent de variateur de la vitesse W du moteur, permettant ainsi le déplacement des deux volets à vitesse rapide puis à vitesse de ralenti. 1- En négligeant la chute de tension aux bornes de Rlim, donner le schéma d'alimentation du moteur, en indiquant le parcours du courant et le signe de la tension aux bornes du moteur, pour les états de sortie du port A 1.1- RA4= 0 et RA3 = 1 (ouverture des volets) 1.2- RA4= 1 et RA3 = 0 (fermeture des volets) 2 -Le blocage accidentel de la porte provoque un courant de surintensité qui ne doit pas dépasser IMmax,courant maximal admissible dans le MCC. Afin de contrôler le courant IM circulant dans le moteur, on branche en série avec ce dernier une résistance Rlim de faible valeur. La tension produite à ses bornes est l'image du courant IM.. Le bloc autour du comparateur C réalise donc un circuit de protection du moteur. L'entrée RB4 configurée en mode interruptible informe en temps réel le microcontrôleur de cette surintensité. 2.1- Pourquoi le blocage de la porte provoque-t-il une surintensité dans le MCC ? …………………………………………………………………………………… ……………………………………………… 2.2- Que représente la tension Vréf ? A-ZAHIDI Page 71
- 72. …………………………………………………………………………………… ………………………………………………. 2.3- Compléter le tableau suivant : Figure 25 :Schéma de principe de la porte automatique 3- Le schéma du CNA est donné par la figure ci-dessous : A-ZAHIDI Page 72
- 73. 3-1- Quel est le type de ce CNA ? …………………………………………………………………………………………………………………………………… 3.2- Vu du point A, le CNA peut être représenté par un modèle de Thevenin (ETH, RTH), avec : Mettre ETH sous la forme ETH = K1.N et donner l’expression de K1 et N en précisant la signification de K1. 3.3- L'amplificateur opérationnel Aop est supposé idéal. Montrer que Vs = (1+R1/R2).UCNA. …………………………………………………………………………………… …………………………………………………………………………………… …………………………………………………………………………………… …………………………………………………………………………………… 3.4- Quel est le rôle du transistor T ? ……………………………………………………………………………………. 3.5- Sachant que ….. = K2.Vs, donner l’expression qui lie ……. et N. ……………………………………………………………………………………. 3.6- Quelle est alors l’influence de N sur la vitesse du moteur. ……………………………………………………………………………………. 3.7- La vitesse rapide et la vitesse de ralenti de la porte correspondent respectivement aux tensions Vs=10V et Vs = 4V : a) Calculer R1 et R2 sachant que la vitesse rapide est sélectionnée par la combinaison RA2 RA1 RA0 = 111 et que (R1 + R2) = 10 K …………………………………………………………………………………… ……………………………………………………………………………………. A-ZAHIDI Page 73
- 74. …………………………………………………………………………………… b)Donner alors la combinaison RA2 RA1 RA0 permettant de sélectionner la vitesse de ralenti . ……………………………………………………………………………… 4) Etude structurelle du système On se basant sur la figure 24 ,Compléter le schéma ci-dessous de la chaîne fonctionnelle du système. A-ZAHIDI Page 74
- 75. c-4) Etude des convertisseurs analogiques /numériques c-4-1) Définition : On appelle Convertisseur Analogique Numérique (C.A.N.) tout dispositif électronique qui transforme une grandeur analogique d’entrée ue en un nombre binaire de sortie N proportionnel à cette grandeur Ue. En anglais, le Convertisseur Analogique Numérique est appelé Analogic Digital Conversion (A.D.C.) c-4-2) Symbole d’un C.A.N. Le signe ….indique que la grandeur est de type analogique (il s’agit ici de l’entrée). Le signe….. indique que la grandeur est de type numérique (il s’agit ici de la sortie). c-4-2) Caractéristique de transfert N=f (ue) Si la grandeur d’entrée ue est une tension, alors : N=k.Ue avec k en V-1 Le nombre N ne peut prendre que des valeurs discrètes alors que la tension Ue accepte toutes les valeurs dans une plage donnée : l’évolution se fera par paliers. Figure26 :caractéristique d’un CAN A-ZAHIDI Page 75
- 76. La caractéristique de transfert N=f(Ue) est constituée par une suite de paliers dont l’origine s’appuie sur la droite d’équation N=k.Ue (Figure 26). c-4-4) Résolution d’un C.A.N. La résolution d’un C.A.N. est la valeur de la variation de la tension d’entrée ue qui provoque un changement d’1 LSB sur le nombre N en sortie. C’est donc la largeur d’un palier de la caractéristique de transfert. Plus la résolution est petite, plus la conversion est précise. c-4-5) Exemples de réalisation c-4-5-1) CAN à approximations successives Ce sont les plus courants des CAN à approximations successives ,ils utilisent des transferts de charge dans un réseau de condensateurs pondérés. Le "cerveau" de ces CAN est un registre : SAR = Successive Approximation Register a) Schéma de Principe : A-ZAHIDI Page 76
- 77. b) fonctionnement On détermine les valeurs des différents bits l’un après l’autre en commençant par le MSB, un peu a la maniéré d’un marchande de marche : On met le bit MSB à 1 tout en gardant les autres à 0.Ce code présent dans le registre R.A.S est converti en une tension Vc par le C.N.A qui est comparée à Vin. Si Vin>Vc on garde le bit MSB à 1 sinon on le remet à zéro. On met le bit suivant à 1 tout en gardant les autres à 0 – bits de poids faible-. Ce code est converti en une tension Vc par le C.N.A qui est comparée à Vin. Si Vin>Vc on garde ce bit à 1 sinon on le remet à zéro. On continue ainsi jusqu’au dernier bits. c) Exemple CAN 4 bits : On effectue une comparaison de la tension à convertir Vin avec la tension issue du CNA connecte au registre. Le premier code issu du registre est 1000 (Cas d’un CAN 4 bits), code correspondant à la tension « moitié » (Vref/2). Puis on décale ce code vers *100 puis **10 etc… A la place de ≪*≫, on vient placer le résultat de la comparaison. Si la tension d’entrée est supérieure on positionne un «1», si elle est inférieure on positionne un «0». A-ZAHIDI Page 77
- 78. d) c-4-6)Exemple d’application :Enregistrement du son A-ZAHIDI Page 78
- 79. I)la fonction Traiter dans un système automatisé I-1)Structure Extraction de l’information: capteur - Physique Conversion en signal utile: conditionneur- Electronique Traitement analogique du signal: filtrage et amplification ( d’instrumentation) Sélection – Multiplexage Numérisation, traitement et exploitation II-2)Solution constructive de la fonction traitement …………………………………………………………………………………………………………………………………………………………… …………………………………………………………………………………………………………………………………………………………… …………………………………………………………………………………………………………………………………………………………… …………………………………………………………………………………………………………………………………………………………… …………………………………………………………………………………………………………………………………………………………… …………………………………………………………………………………………………………………………………………………………… ………………………………………………………………………………………………………………………………………………………….. II) Etude du fonctionnement du store automatisé II-2) Situation problème Comment décrire le fonctionnement du store pour faciliter le traitement des informations ? II-3) Solutions le fonctionnement global du store est décrit comme suit : La motorisation du système est basée autour d'un moteur asynchrone monophasé (tubulaire) ; La commande est assurée par un Automate Programmable Industriel (API) de type Zelio ; Un commutateur à 4 positions permet de choisir entre : l’arrêt (Stop) ; A-ZAHIDI Page 79
- 80. le mode automatique (Automatique) ; le mode manuel qui permet l’intervention de l'utilisateur, pour remonter ( ou descendre) ; le store; En mode automatique : L’intensité des rayons solaires est captée par une photodiode ; si la lumière solaire dépasse un certain seuil d'intensité réglable, le store descend ; La vitesse du vent est captée par un anémomètre ; le store est protégé en forçant sa remontée, en cas du dépassement d'un certain seuil de vitesse qui est réglable ; La prise en compte du vent est prioritaire sur la prise en compte de la luminosité, ainsi que sur la commande manuelle ; La détection des déplacements limites de la toile est assurée par des capteurs de fin de course intégrés au mécanisme du moteur tubulaire, réalisant de ce fait une solution câblée pour cette détection. Il faut donc chercher un outil graphique pour décrire ce fonctionnement et faciliter donc la programmation au niveau de la fonction traiter. …………………………………………………………………………………… …………………………………………………………………………………… ……………………………………………………………………………………. ................................................................................................................................. ................................................................................................................................. ................................................................................................................................. ................................................................................................................................. ................................................................................................................................. ................................................................................................................................. ................................................................................................................................. ................................................................................................................................. ................................................................................................................................. ................................................................................................................................. ................................................................................................................................. ................................................................................................................................. ................................................................................................................................. ................................................................................................................................. ................................................................................................................................. ................................................................................................................................. ................................................................................................................................. ................................................................................................................................. A-ZAHIDI Page 80
- 81. ................................................................................................................................. ................................................................................................................................. III) GRAFCET III-1)Définition III-2)Description de GRAFCET a)Etape A-ZAHIDI Page 81
- 83. e) Réceptivité f) Symbolisation de GRAFCET A-ZAHIDI Page 83
- 84. g) Règles d’évolution de GRAFCET A-ZAHIDI Page 84
- 85. h) Les structures de base de GRFCET A-ZAHIDI Page 85
- 86. i) GRAFCET niveau 1 et niveau2 A-ZAHIDI Page 86
- 87. A-ZAHIDI Page 87