
Recommandé
Recommandé
Contenu connexe
Tendances
Tendances (20)
En vedette
En vedette (20)
Ao
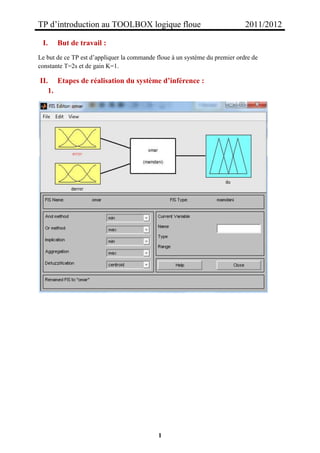
- 1. TP d’introduction au TOOLBOX logique floue 2011/2012 I. But de travail : Le but de ce TP est d’appliquer la commande floue à un système du premier ordre de constante T=2s et de gain K=1. II. Etapes de réalisation du système d’inférence : 1. 1
- 2. TP d’introduction au TOOLBOX logique floue 2011/2012 2. 3. E 2
- 3. TP d’introduction au TOOLBOX logique floue 2011/2012 de 3
- 4. TP d’introduction au TOOLBOX logique floue 2011/2012 du 4
- 5. TP d’introduction au TOOLBOX logique floue 2011/2012 4. Les regles 5
- 6. TP d’introduction au TOOLBOX logique floue 2011/2012 6
- 7. TP d’introduction au TOOLBOX logique floue 2011/2012 La visualisation : Pour le 1er cas e=2 et de= 0.5 alors du=+0.921 Pour le 2eme cas e=-0.7 et de= -0.3 alors du=-0.572 7
- 8. TP d’introduction au TOOLBOX logique floue 2011/2012 Interprétation : Dans le 1 cas les deux règle (3 et 4) elles sont ensemble de sortie. Sauf dans le 2 cas les 4 règles elles sont ensemble de sortie. III. Simulation Le schéma bloc Pour le Gain = 510 1/10 t1 10 1 Gain1 510 Constant 2s+1 To Workspace2 Gain Transfer Fcn du/dt 1/10 Fuzzy Logic Scope Controller 3.642 Derivative Gain2 with Ruleviewer 10 Display t Clock To Workspace1 8
- 9. TP d’introduction au TOOLBOX logique floue 2011/2012 La courbes : 12 10 8 la sortie 6 4 2 0 0 10 20 30 40 50 60 70 80 90 100 temps(s) Pour le Gain = 510 1/10 t1 10 1 Gain1 10 Constant 2s+1 To Workspace2 Gain Transfer Fcn du/dt 1/10 Fuzzy Logic Scope Controller 3.642 Derivative Gain2 with Ruleviewer 10 Display t Clock To Workspace1 La courbes 10 9 8 7 6 la sortie 5 4 3 2 1 0 0 10 20 30 40 50 60 70 80 90 100 temps(s) 9
- 10. TP d’introduction au TOOLBOX logique floue 2011/2012 1/10 t1 10 1 1 Gain1 1 s 2s+1 To Workspace2 Constant Integrator Gain Transfer Fcn du/dt 1/10 Fuzzy Logic Scope Controller 9.946 Derivative Gain2 with Ruleviewer 10 Display t Clock To Workspace1 10 9 8 7 6 la sortie 5 4 3 2 1 0 0 10 20 30 40 50 60 70 80 90 100 temps(s) 1- Choisir convenablement les gain Ge et Gde Le gain Ge = Gde =1/10 10