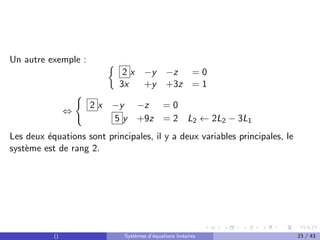
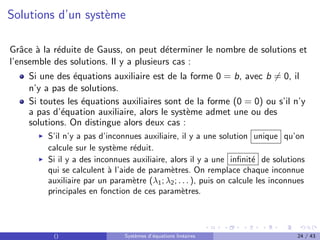
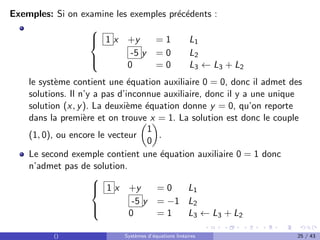
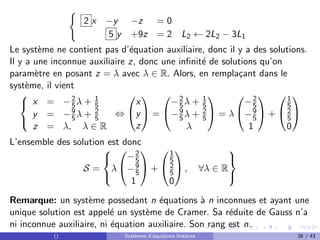
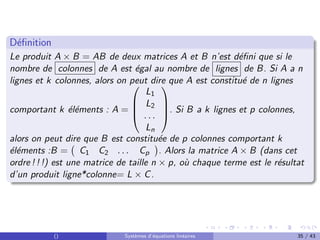
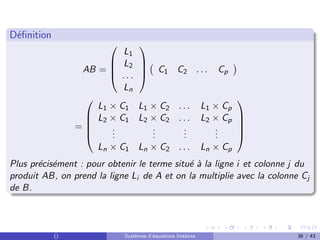
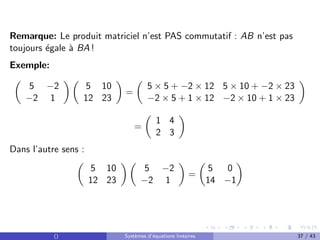
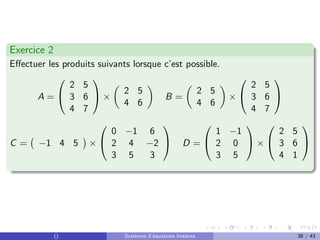
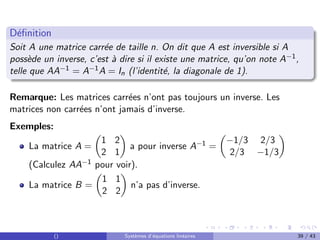
Ce document traite des systèmes d'équations linéaires, en abordant leur définition, leur résolution par la méthode du pivot de Gauss, et leur mise en forme matricielle. Il explique également comment établir des systèmes équivalents afin de simplifier la résolution. Enfin, le texte explore les différents types de solutions possibles selon les caractéristiques des systèmes.