Ce document traite de l'algorithmique des graphes, en explorant leur modélisation mathématique et leurs applications en informatique. Il couvre divers concepts tels que les représentations des graphes, les types de données abstraits, et les méthodes d'exploration. De plus, il aborde les algorithmes pertinents, les relations entre graphes, ainsi que des applications spécifiques et des techniques d'analyse de complexité.









![Chapitre 1
Introduction, exemples
1.1 Historique
La th´orie des graphes a pris naissance en 1736 : le math´maticien allemand L. Euler
e e
apporta une r´ponse au probl`me que se posaient les habitants de la ville de Koenigsberg ; `
e e a
savoir :comment traverser les sept ponts de cette ville sans jamais passer deux fois par le mˆme.
e
Jusqu’en 1946, la th´orie des graphes reste du domaine des math´matiques; les math´maticiens
e e e
ayant associ´ leurs noms aux travaux les plus marquants sont, entre autres :
e
– au 19`me si`cle : Kirchoff, Hamilton, Sylvester, Kempe, Lucas, Petersen, Tarry
e e
e e e ¨
– au 20`me si`cle (1`re moiti´) : Poincare, Sainte-Lague, Kuratowski, Hall, Polya,
e
¨
Konig, Whitney, Tutte.
Des recherches militaires li´es au conflit mondial de 1939-45 naˆ la Recherche Op´rationnelle
e ıt e
provoquant un d´veloppement de la th´orie des graphes comme mod`les de probl`mes concrets ;
e e e e
cet aspect est encore renforc´, dans les ann´es qui suivent, par le d´veloppement des Sciences
e e e
´
Economiques et de Gestion. Les grands sp´cialistes de cette nouvelle orientation des graphes
e
¨
seront des auteurs tels que Kuhn, Dantzig, Ford, Fulkerson, Ghouila-Houry, Harary,
Saaty, Bellmann, Roy, Berge, Faure, Kaufmann, etc... Une troisi`me ´poque a ´t´ ou-
e e ee
verte dans les ann´es 1960, avec le d´veloppement des sciences de l’information et de la commu-
e e
nication. Des informaticiens tels que Dijkstra, Knuth, Wirth, Sakharovitch, Gondran
et beaucoup d’autres, participent au d´veloppement de l’algorithmique des graphes autant qu’`
e a
la mod´lisation de probl`mes n´s de ces nouvelles sciences en terme de graphes. Une approche
e e e
historique se trouve dans l’introduction de [GM79], qui renvoie d’ailleurs ` un ouvrage historique
a
complet sur la premi`re ´poque de la th´orie des graphes (1746-1936) [BLW76].
e e e
1.2 Relations graphes et informatique
Les relations entre graphes et informatique sont ` double sens :
a
1. l’informatique, outil de r´solution de probl`mes de graphes
e e
2. les graphes, outil de mod´lisation de probl`mes informatiques.
e e
On aboutit donc, dans certaines situations, ` l’informatique comme outil de r´solution de ses
a e
propres probl`mes (via la mod´lisation en termes de graphes). Ce cours s’int´resse essentiellement
e e e
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-9-320.jpg)








![2.2. Notion de chemin 19
2.2 Notion de chemin
D´finition 2.3 Un chemin de G est une suite de sommets
e
[xi1 ,xi2 , . . . ,xik ]
telle que :
(xi1 ,xi2 ) ∈ Γ, (xi2 ,xi3 ) ∈ Γ, . . . , (xik−1 ,xik ) ∈ Γ
xi1 en est l’origine, xik l’extr´mit´ et les xij (2 ≤ j ≤ k − 1), s’ils
e e
existent, les sommets interm´diaires.
e
Un chemin allant de x ` y, dont on ne pr´cise pas les sommets interm´diaires, sera not´ :
a e e e
u = [x ∗ y]
Si l’on souhaite d´signer des sommets interm´diaires, on utilisera la notation telle que :
e e
u = [x1 ∗ xp ∗ xq ∗ xk ]
y est alors un descendant de x et x un ascendant de y.
La longueur du chemin u , ou |u|, est le nombre d’arcs qui le composent.
u · v d´signe la concat´nation de deux chemins tels que
e e
extr´mit´ de u = origine de v ; on a alors |u · v| = |u| + |v|.
e e
Un circuit est un chemin dont l’extr´mit´ co¨
e e ıncide avec l’origine.
Un chemin (resp. circuit) ´l´mentaire est d´fini par une suite de sommets sans r´p´tition (sauf
ee e e e
l’origine et l’extr´mit´ pour un circuit)
e e
2.3 Repr´sentations de l’objet math´matique
e e
On s’int´resse aux repr´sentations visuelles, destin´es au traitement ”` la main”. On peut
e e e a
utiliser :
a)- le graphique (diagramme sagittal) Exemple : graphe G1
2 4 9
1 3 5 7 8
6
Fig. 2.2 – Diagramme Sagittal
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-19-320.jpg)


![22 Aspect algorithmique : un type de donn´es abstrait
e
i j
Dans une repr´sentation graphique on utilisera souvent le sch´ma ci-dessous pour indiquer
e e
que l’arc dessin´ relie le sommet de num´ro i au sommet de num´ro j.
e e e
Par commodit´ de notation, on d´signera souvent par (x,y) l’arc γ tel que γ .ori=x et γ .ext=y,
e e
ou par (i,j) l’arc γ tel que γ .ori.num=i et γ .ext.num=j.
3.2 Trois exemples de repr´sentation concr`te
e e
Ces exemples utilisent les structures de donn´es suppos´es connues TABLEAU[G], TABLEAU2[G],
e e
LISTE[G]. La premi`re d´crit les tableaux ` une dimension, la deuxi`me les tableaux ` deux
e e a e a
dimensions et la troisi`me les listes chaˆ ees. L’identificateur G d´signe le type des ´l´ments
e ın´ e ee
contenus dans ces structures (type g´n´rique formel).
e e
3.2.1 Repr´sentation par tableaux
e
ENT GRAPHE::nmax ;
-- num´ro maximum de sommet. On repr´sente les graphes dont les sommets peuvent ˆtre num´
e e e
TABLEAU[BOOL] GRAPHE::vs ;
-- G.vs[i] indique l’existence du sommet de num´ro i, 1 ≤ i ≤ G.nmax
e
TABLEAU2[BOOL] GRAPHE::m ;
-- G.m[i,j] indique l’existence de l’arc (i,j), 1 ≤ i, j ≤ G.nmax
On a toujours l’implication ∀i ∀j : G.m[i,j] ⇒ G.vs[i] ∧ G.vs[j] (un arc ne peut relier que des
sommets existants).
Dans cette repr´sentation de G = (X,Γ), les ensembles X et Γ sont repr´sent´s de la mani`re
e e e e
suivante :
x ∈ X ⇔ G.vs[x.num]
(x,y) ∈ Γ ⇔ G.m[x.num,y.num]
Exemple : Graphe G1 nmax = 10 ;
1 2 3 4 5 6 7 8 9 10
vs
v v v v v v v v v f
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-22-320.jpg)
![3.2. Trois exemples de repr´sentation concr`te
e e 23
1 2 3 4 5 6 7 8 9 10
1 v v
2 v
3 v v v
4 v v
m 5 v v v les cases vides ont
6 v des valeurs faux
7
8 v
9
10
3.2.2 Repr´sentation par tableaux et listes
e
Les attributs nmax et vs sont d´finis comme pr´c´demment.
e e e
TABLEAU[LISTE[SOMMET]] GRAPHE::ts ;
-- G.ts[i] d´signe la liste des successeurs du sommet
e
de num´ro i, 1 ≤ i ≤ G.nmax.
e
On a toujours : si G.vs[i] est faux, alors G.ts[i] est n´cessairement vide (en fait, cette liste
e
n’est mˆme pas d´finie). Dans cette repr´sentation de G = (X,Γ), les ensembles X et Γ sont
e e e
repr´sent´s de la mani`re suivante :
e e e
x ∈ X ⇔ G.vs[x.num]
(x,y) ∈ Γ ⇔ G.ts[x.num].contient(y)
Exemple : Graphe G1 nmax = 10 ;
1 2 3 4 5 6 7 8 9 10
vs
v v v v v v v v v f
3.2.3 Repr´sentation d´centralis´e par listes
e e e
Le type SOMMET est enrichi : chaque sommet a maintenant comme attribut la liste de ses
successeurs. Le graphe se r´duit alors ` la liste de ses sommets.
e a
ENT SOMMET::num ; -- comme pr´c´demment
e e
LISTE[SOMMET] SOMMET::ls ;
-- x.ls est la liste des sommets successeurs de x.
LISTE[SOMMET] GRAPHE::lsom ;
-- G.lsom est la liste des sommets du graphe G.
Dans cette repr´sentation du graphe G = (X,Γ), les ensembles X et Γ sont repr´sent´s de la
e e e
mani`re suivante :
e
x ∈ X ⇔ G.lsom.contient(x)
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-23-320.jpg)
![24 Aspect algorithmique : un type de donn´es abstrait
e
ts 1 [ 2; 3 ]
2 [5]
3 [ 3; 4; 6 ]
4 [ 2; 5 ]
5 [ 6; 7; 8 ]
6 [3]
7 []
8 [7 ]
9 [9]
10
(x,y) ∈ Γ ⇔ G.lsom.contient(x) et G.lsom.contient(y) et x.ls.contient(y)
lsom
1 2 3 4 5 6 7 8 9
G1
x.ls [ 2; 3 ] [5] [ 3; 4; 6 ] [ 2; 5 ] [ 6; 7; 8 ] 3 ]
[ [] [7 ] [9]
Exemple : Graphe G1
3.3 Le type abstrait Graphe : les m´thodes
e
La plupart des algorithmes de r´solution de probl`mes mod´lis´s par des graphes peuvent ˆtre
e e e e e
d´crits ` l’aide de traitements plus ou moins ´l´mentaires sur le graphe mod´lisant le probl`me.
e a ee e e
Cette description –enchaˆ ınement contrˆl´ des actions– est ´videmment, ` un certain niveau,
oe e a
intrins`que, c’est ` dire ind´pendante de la repr´sentation choisie pour le graphe.
e a e e
Par exemple, l’algorithme de saisie ci-apr`s construit un graphe ` partir de donn´es lues dans
e a e
un fichier. Le format de pr´sentation des donn´es est le suivant :
e e
– S´quence des arcs, chaque arc ´tant donn´ comme un couple d’entiers (num´ro d’origine,
e e e e
num´ro d’extr´mit´), termin´e par (0,0);
e e e e
– s´quence des num´ros des sommets isol´s, termin´e par 0.
e e e e
Exprim´ en faisant abstraction d’une repr´sentation concr`te particuli`re, on obtient le texte:
e e e e
GRAPHE construction c’est
local ENT i, j ;
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-24-320.jpg)
![3.3. Le type abstrait Graphe : les m´thodes
e 25
GRAPHE G ;
d´but
e
-- initialisation au graphe vide
G. creer ;
-- lecture de la liste des arcs
depuis i ← lire ; j ← lire
jusqu a i=0 et j=0
faire
G. ajoutarc(i, j) ;
i ← lire ; j ← lire
fait ;
-- lecture de la liste des sommets isol´s
e
depuis i ← lire
jusqua i=0
faire
G. ajout sommet(i) ;
i ← lire
fait ;
Result ← G
-- Result est une variable exprimant le r´sultat d’une fonction
e
fin
L’algorithme, pr´sent´ sous cette forme, peut s’appliquer ` n’importe quelle repr´sentation
e e a e
interne du graphe : il suffit, dans chaque cas, de ”traduire” convenablement les op´rations in-
e
diqu´s en italique.
e
Dans ce texte, le type GRAPHE n’est pas d´fini concr`tement : on l’appelle type abstrait.
e e
Cela signifie, qu’` ce niveau d’expression, on n’a pas besoin d’en savoir plus sur les structures
a
de donn´es qui seront effectivement utilis´es pour repr´senter concr`tement l’objet G.
e e e e
Les traitements ´l´mentaires en italique ont ´t´ d´nomm´s. On les appelle des m´thodes du
ee ee e e e
type abstrait GRAPHE, et tout ce que l’on a besoin de connaˆıtre est leur s´mantique. Ainsi, on
e
aura d´fini une fois pour toutes que :
e
creer : proc´dure qui initialise le graphe courant au graphe vide (∅,∅).
e
ajoutarc(ENT i; ENT j) : ajout au graphe courant de l’arc (i, j) (et au besoin des
sommets de num´ro i et j)
e
ajout sommet(ENT i) : ajout au graphe courant du sommet de num´ro i
e
La liste compl`te des acc`s, avec leur s´mantique, est donn´e en Annexe.
e e e e
On peut poursuivre cette d´marche. En effet, les structures de donn´es utilis´s dans les
e e e
repr´sentations ”concr`tes” des graphes peuvent ˆtre elles aussi consid´r´es comme des types de
e e e ee
donn´es abstraits (c’est le cas par exemple du type g´n´rique LISTE[T]). Ces types de donn´es
e e e e
abstraits peuvent ` leur tour ˆtre manipul´s ` travers leurs m´thodes, et mis en oeuvre selon
a e e a e
diverses repr´sentations concr`tes, etc. Dans le cas du type LISTE[T], par exemple, la m´thode
e e e
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-25-320.jpg)





![4.3. Composition 31
D´monstration : Cet ´nonc´ signifie que
e e e
∀G1 ,G2 ,G3 ∈ G(X) : G1 G2 ⇒ (G1 ◦ G3 G2 ◦ G3 )
∧ (G3 ◦ G1 G3 ◦ G2 )
Si Gi = (X,Γi ) (i = 1,2,3), on a :
(x,y) ∈ Γ1 ◦ Γ3 ⇒ ∃z ∈ X : (x,z) ∈ Γ1 ∧ (z,y) ∈ Γ3
⇒ ∃z ∈ X : (x,z) ∈ Γ2 ∧ (z,y) ∈ Γ3
⇒ (x,y) ∈ Γ2 ◦ Γ3
ce qui montre que G1 ◦ G3 G2 ◦ G3 .
La deuxi`me in´galit´ se montre de mani`re analogue.P
e e e e
4.3.2 Algorithme
Nous donnons ci-dessous un algorithme de construction de G3 = G1 ◦ G2 , en supposant pour
simplifier que X = [1..n]
4.3.2.1 Analyse
Pour tout couple (x,y) ∈ X 2 , il faut d´terminer si (x,y) est ou non un arc de G3 . Par
e
d´finition,
e
(x,y) ∈ Γ3 ⇐⇒ ∃z (1 ≤ z ≤ n) ∧ ((x,z) ∈ Γ1 ) ∧ ((z,y) ∈ Γ2 )
Notons P(z) la proposition : ((x,z) ∈ Γ1 ) ∧ ((z,y) ∈ Γ2 ). Il s’agit d’´valuer le pr´dicat :
e e
∃t 1 ≤ t ≤ n : P (t). Cette ´valuation est mise en œuvre par un calcul it´ratif. La figure
e e
ci-dessous en d´termine l’invariant :
e
zone deja examinee zone non encore examinee
1 z z+ 1 n
c’est-`-dire, plus formellement :
a
I ≡ (0 ≤ z ≤ n) ∧ (b = ∃t 1 ≤ t ≤ z : P (t))
Le calcul sera termin´ lorsque :
e
(z = n) ∨ b
et, lorsque ceci se produit :
– si b alors (∃t 1 ≤ t ≤ z : P (t)) ∧ (z ≤ n), c’est-`-dire (∃t 1 ≤ t ≤ n : P (t)) (*succes*)
a
– si ¬b alors (z = n) ∧ ¬(∃t 1 ≤ t ≤ n : P (t)) (* ´chec *)
e
Le r´sultat est donc ´gal ` b
e e a
Si le calcul n’est pas termin´, on progresse en mettant ` jour les variables z et b de la mani`re
e a e
suivante :
z←z + 1 ; b←P (z)
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-31-320.jpg)

![4.4. Puissances d’un graphe 33
On dit que c’est un algorithme en O(n3 ), en termes d’acc`s validarc.
e
Remarques
1) La complexit´ de mise en œuvre de chacun des acc`s d´pend ´videmment de la repr´sentation
e e e e e
choisie pour chacun des 3 graphes G1, G2, Result.
2) Si les graphes sont tous les trois repr´sent´s par leur matrice bool´enne, alors il est facile
e e e
de voir que
M3 = M1 · M2 o` le · d´signe le produit matriciel bool´en de deux matrices :
u e e
n
∀1 ≤ i,j ≤ n : m3ij = (m1ik ∧ m2kj )
k=1
4.4 Puissances d’un graphe
On d´finit par r´currence sur p ∈ N le graphe G[p] = (X,Γ[p] ) de la mani`re suivante :
e e e
D´finition 4.3
e
G[0] = D
∀p ≥ 1 : G[p] = G[p−1] ◦ G = G ◦ G[p−1]
propri´t´s : G[k] ◦ G[l] = G[k+l]
e e
(G[k] )[l] = G[kl]
(identiques aux puissances des nombres r´els)
e
Nous allons interpr´ter les puissances d’un graphe.
e
Proposition 4.4 Soit G[p] = (X,Γ[p] ) la puissance peme d’un graphe
`
G = (X,Γ). Alors, (x,y) ∈ Γ[p] si et seulement si il existe, dans G, un
chemin de longueur p, allant de x ` y (ce chemin est un circuit si x =
a
y).
D´monstration Par r´currence sur p :
e e
– Pour p= 1, le r´sultat est ´vident : G[1] = (X,Γ) et les arcs sont les chemins de longueur 1.
e e
– Supposons d´montr´ jusqu’` p-1.
e e a
(x,y) ∈ Γ[p] = Γ[p−1] ◦ Γ
⇐⇒ ∃z ∈ X : (x,z) ∈ Γ[p−1] ∧ (z,y) ∈ Γ
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-33-320.jpg)
![34 Relations et op´rateurs entre graphes
e
⇐⇒ ∃z ∈ X : ∃u = [x ∗ z], | u |= p − 1 ∧ ∃v = [zy], | v |= 1
⇐⇒ ∃w = u.v = [x ∗ y], | w |=| u | + | v |= p
ce qui d´montre le r´sultat pour p P
e e
4.5 Graphe transpos´
e
D´finition 4.5 Le graphe transpos´ de G = (X,Γ) est :
e e
Gt = (X,Γt ) avec
(x,y) ∈ Γt ⇐⇒ (y,x) ∈ Γ
C’est donc le graphe d´duit de G par inversion du sens de tous les arcs. On utilise parfois
e
la notation Γ −1 , lorsqu’on veut exprimer le fait que l’application multivoque associ´e ` Gt
e a
est l’inverse de l’application multivoque Γ li´e ` G. Remarquons toutefois que les relations
e a
Γ ◦ Γ−1 = ∆ ou Γ−1 ◦ Γ = ∆ ne sont en g´n´ral pas v´rifi´es. Ainsi, Γ−1 ne doit pas ˆtre
e e e e e
consid´r´ comme la ”puissance moins un” du graphe, mais bien comme une notation d´signant
ee e
l’ensemble des arcs du graphe transpos´.e
4.6 Sous-graphe
Dans ce paragraphe, les graphes consid´r´s ne sont pas tous construits sur le mˆme ensemble
ee e
de sommets. En effet, si nous avons un graphe G = (X,Γ), certaines op´rations sur G peuvent
e
amener ` supprimer des sommets. Or, si un sommet est ˆt´ du graphe, il va de soi que les
a oe
´ventuels arcs adjacents ` X doivent aussi ˆtre supprim´s : la suppression d’un objet entraˆ la
e a e e ıne
suppression de toutes les relations relatives ` cet objet ! Cette remarque pr´liminaire conduit `
a e a
la d´finition suivante :
e
D´finition 4.6 Soit G = (X,Γ) ∈ G(X) et A ⊂ X.
e
Le sous-graphe engendr´ par A est d´fini par :
e e
GA = (A,ΓA ) ∈ G(A),avec
ΓA = {(x,y) | x ∈ A,y ∈ A,(x,y) ∈ Γ}
On peut donner un algorithme de construction du sous-graphe engendr´ par A :
e
sous graphe(ENS[SOMMET] A) c’est
local SOMMET z
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-34-320.jpg)


![Chapitre 5
Fermeture transitive
Le probl`me ´tudi´ dans ce chapitre est celui de l’existence des chemins entre tous les couples
e e e
de sommets. Plus pr´cis´ment :
e e
´
Etant donn´ un graphe G = (X,Γ), construire le graphe G+ = (X,Γ+ ) tel que (x,y) ∈ Γ+ ⇔
e
il existe un chemin de G allant de x ` y. G+ s’appelle la fermeture transitive de G.
a
Nous allons voir successivement les bases th´oriques, puis deux algorithmes permettant de
e
r´soudre le probl`me, et enfin des exemples d’application.
e e
5.1 Retour sur la transitivit´
e
Un graphe est transitif si la relation binaire qui lui est associ´e est transitive. En d’autres
e
termes :
∀x,y,z ∈ X : (x,y) ∈ Γ ∧ (y,z) ∈ Γ =⇒ (x,z) ∈ Γ.
Voici une propri´t´ caract´ristique des graphes transitifs:
ee e
Proposition 5.1 Un graphe G est transitif si et seulement si tout che-
min de longueur deux est sous-tendu par un arc, c’est-`-dire : Γ[2] ⊂ Γ
a
D´monstration
e
1. Supposons G transitif.
G transitif ⇒ ∀x∀y∀z ((x,y) ∈ Γ ∧ (y,z) ∈ Γ ⇒ (x,z) ∈ Γ)
⇒ ∀x∀z (∃y ((x,y) ∈ Γ ∧ (y,z) ∈ Γ) ⇒ (x,z) ∈ Γ)
⇒ ∀x∀z (x,z) ∈ Γ[2] ⇒ (x,z) ∈ Γ
⇒ Γ[2] ⊆ Γ
2. R´ciproquement, supposons Γ[2] ⊆ Γ.
e
(x,z) ∈ Γ ∧ (z,y) ∈ Γ ⇒ (x,y) ∈ Γ[2]
⇒ (x,y) ∈ Γ P
⇒ G est transitif
Cette propri´t´ admet un corollaire ´vident:
ee e
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-37-320.jpg)
![38 Fermeture transitive
Corollaire 5.2 Un graphe G est transitif si et seulement si tout chemin
est sous-tendu par un arc, c’est-`-dire : ∀k ≥ 2 : Γ[k] ⊂ Γ
a
D´monstration Par r´currence sur k :
e e
– vrai pour k = 2, d’apr`s la proposition pr´c´dente.
e e e
– Hypoth`se de r´currence : Γ
e e [k−1] ⊆ Γ. Cela signifie: G[k−1] G. On a alors :
[k] [k−1]
G = G ◦G
G ◦ G(hypoth`se de r´currence et proposition 4.2)
e e
G[2]
G (proposition 5.1)
P
L’interpr´tation “concr`te” de ce corollaire est la suivante : dans un graphe transitif, la notion
e e
de chemin se confond avec la notion d’arc.
Nous allons maintenant aborder les caract´risations et les algorithmes de calcul de la fermeture
e
transitive. Le terme de fermeture transitive provient du fait que, d’une part, G+ est transitif
(par construction!), et d’autre part, G+ est le plus petit graphe transitif sup´rieur ou ´gal ` G
e e a
(au sens de la relation ). Plus pr´cis´ment :
e e
– G + est transitif,
– G G+
– Si H est transitif et G H, alors G+ H
Intuitivement, on obtient G+ ` partir de G en rajoutant “juste ce qu’il faut” d’arcs pour rendre
a
le graphe transitif. La d´monstration de ces propri´t´s ne pr´sente aucune difficult´. Elle est
e ee e e
laiss´e en exercice au lecteur.
e
5.2 Caract´risation du graphe G+
e
Proposition 5.3 G+ = G ∪ G[2] ∪ . . . ∪ G[k] ∪ . . .
D´monstration Posons G+ = (X,Γ+ ) et, ∀k ≥ 1, G[k] = (X,Γ[k] ). Par d´finition,
e e
(x,y) ∈ Γ+ ⇔ ∃u = [x y] dans G
⇔ (x,y) ∈ Γ[k] ,o` k = |u|
u
⇔ (x,y) ∈ Γ ∪ Γ[2] ∪ . . . ∪ Γ[k] ∪ . . .
P
La proposition suivante montre que le probl`me se r´duit ` l’existence des chemins ´l´mentaires.
e e a ee
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-38-320.jpg)
![5.2. Caract´risation du graphe G+
e 39
Proposition 5.4 Les deux propositions suivantes sont ´quivalentes :
e
i) Dans le graphe G, il existe un chemin de x ` y,
a
ii) Dans le graphe G, il existe un chemin ´l´mentaire de x ` y
ee a
e ´
D´monstration ii) ⇒ i). Evident puisque tout chemin ´l´mentaire est un chemin.
ee
i) ⇒ ii). Supposons qu’il existe un chemin u = [x ∗ y]. S’il est ´l´mentaire, la d´monstration est
ee e
termin´e; sinon, la suite de sommets le d´finissant comporte au moins une r´p´tition :
e e e e
u = [x ∗ z ∗ z ∗ y] (´ventuellement, z = x ou z = y)
e
On a donc :
u = u1 · u2 · u3
avec u1 = [x ∗ z],u2 = [z ∗ z],u3 = [z ∗ y] et u’ = u1 · u3 est un chemin de x ` y, obtenu `
a a
partir de u en ”court-circuitant” le circuit [z ∗ z]. En it´rant ce raisonnement tant qu’il y a des
e
r´p´titions (circuits contenus dans le chemin), on obtient n´cessairement un chemin ´l´mentaire
e e e ee
reliant x ` y.
a P
Des deux propositions pr´c´dentes r´sulte la caract´risation suivante :
e e e e
Corollaire 5.5 Soit G = (X,Γ) et n =| X |. On a :
G+ = G ∪ G[2] ∪ . . . ∪ G[n]
D´monstration Le r´sultat d´coule des deux propositions pr´c´dentes et du fait que tout
e e e e e
chemin ´l´mentaire est de longueur ≤ n (et mˆme ≤ n − 1 si ce n’est pas un circuit).
ee e P
On peut encore ˆtre plus pr´cis :
e e
Proposition 5.6 Soit k la longueur maximum des chemins
´l´mentaires de G. Alors :
ee
i) k ≤ n,
k k+1
ii) G[j] = G[j]
j=1 j=1
iii) G+ =G ∪ G[2] ∪ . . . ∪ G[k]
D´monstration i) : par d´finition des chemins ´l´mentaires (longueur ≤ n)
e e ee
k+1
ii) Si (x,y) ∈ G[j] alors il existe dans G un chemin u de longueur ≤ k + 1, allant de x ` y.
a
j=1
D’apr`s la proposition 5.4, il existe dans G un chemin ´l´mentaire allant de x ` y; autrement dit,
e ee a
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-39-320.jpg)
![40 Fermeture transitive
k k k+1
[j] [j]
il existe un entier ≤ k tel que (x,y) ∈ G[ ] . Comme G[ ] ⊆ G on a bien G = G[j] .
j=1 j=1 j=1
iii) Imm´diat D’apr`s le point pr´c´dent et le corollaire 5.5
e e e e P
5.3 Algorithme des puissances
L’algorithme des puissances calcule G+ en se basant sur la proposition 5.6. Il est construit
en maintenant invariante la proposition ci-dessous :
(G+ = G ∪ ... ∪ G[k] ) ∧ (H = G ∪ ... ∪ G[k−1] ) ∧ (1 ≤ k ≤ n)
Le calcul sera donc termin´ lorsque H = G+
e
Si le calcul n’est pas termin´, la progression consiste ` mettre ` jour les variables H,G+ :
e a a
H ← G+ ;
G+ ← G ∪ (G+ ◦ G)
En effet :
k
si G+ = G[j] alors
j=1
k+1
G+ ◦ G = G[j] (distributivit´ de ◦ par rapport ` ∪) d’o`
e a u
j=2
k+1
G ∪ (G+ ◦ G) = G[j]
j=1
Les valeurs initiales doivent v´rifier l’invariant et ˆtre faciles ` ´valuer en fonction des
e e a e
donn´es :
e
G+ ← G, H arbitraire (mais = G+ , par exemple : H ← (∅,∅)).
Le texte de l’algorithme en d´coule.
e
5.3.1 Texte de l’algorithme
Il est donn´ page 41
e
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-40-320.jpg)



![44 Fermeture transitive
ALGORITHME DE ROY-WARSHALL
GRAPHE roy-warshall(GRAPHE G) c’est
local SOMMET x,y,z ; ENS[SOMMET] X;
d´but
e
Result ← G ; X ← G.lst som ;
pour tout x de X
pour tout y de X
si Result.validarc(y,x) alors
pour tout z de X
si Result.validarc(x,z)
alors Result.ajoutarc(y,z)
fsi
fpourtout
fsi
fpourtout
fpourtout
fin
5.4.4 Routage
5.4.4.1 D´finition
e
L’id´e du routage est la suivante: si l’on calcule la fermeture transitive G+ d’un graphe G,
e
on est capable de r´pondre ` la question : quels que soient les sommets x et y, existe-t-il dans G
e a
un chemin de x ` y? Une information de routage doit permettre de compl´ter cette r´ponse, en
a e e
fournissant le trac´ d’un tel chemin (lorsque celui-ci existe). Il y a plusieurs mani`res d’obtenir
e e
un routage. Nous en d´crivons une, bas´e sur la notion de table. Rappelons qu’une table est une
e e
structure de donn´es mettant en oeuvre une correspondance entre un ensemble de clefs et un
e
ensemble de valeurs. Le type abstrait TABLE[K,E] d´crit les tables dont l’ensemble des clefs est K
e
et l’ensemble des valeurs E (math´matiquement, ce sont les applications de K dans E). Une table
e
est d´clar´e TABLE[K,E] T; elle est alors acc´d´e par les op´rations suivantes :
e e e e e
– T[x] : d´livre la valeur v de type E correspondant ` la clef x (de type K).
e a
– T[x] ←v affecte la valeur v de type E ` l’´l´ment correspondant ` la clef x (de type K).
a ee a
Les objets de type SOMMET sont alors munis d’une table, selon la d´claration ci-dessous :
e
TABLE[SOMMET,SOMMET] SOMMET::R
avec la signification suivante:
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-44-320.jpg)
![5.4. Algorithme de Roy-Warshall 45
Pour tout sommet y, pour tout sommet z,
nil si z ∈ Γ+ (y) o` nil signif ie pas de successeur
u
y.R[z] =
successeur de y sur un chemin de y ` z dans G si
a
z ∈ Γ+ (y)
La connaissance des sommets y.R[z] permet-elle de d´terminer le trac´ d’un chemin de y `
e e a
z, ` partir de n’importe quel y? La r´ponse n’est pas toujours positive ! En effet, l’algorithme de
a e
trac´ a l’allure suivante (si y.R[z] = nil) :
e
d´but
e
local SOMMET somcour;
depuis ecrire ← y ; somcour ← y.R[z];
jusqua somcour = z
faire
ecrire ← somcour ;
somcour ← somcour.R[z];
fait;
ecrire ← z
fin
Mais rien ne prouve que cet algorithme se termine ; par exemple :
1 2 4 y y.R[4]
1 2
avec, pour R[4] : 2 3
3 2
3 4 nil
A partir des sommets 1, 2 ou 3, l’algorithme boucle, et pourtant les valeurs R[4] sont bien
conformes ` la d´finition.
a e
Nous allons donc renforcer la d´finition, afin d’´viter cette difficult´, en imposant ` y.R[z],
e e e a
si z ∈ Γ + (y), d’ˆtre le successeur de y sur un chemin ´l´mentaire de y ` z. Il est alors facile
e ee a
de v´rifier que l’algorithme de trac´ se termine, puisque les valeurs successives de la variable
e e
somcour sont distinctes. (Sauf ´ventuellement y = z pour un circuit ´l´mentaire).
e ee
Pour tout sommet y, pour tout sommet z,
nil si z ∈ Γ+ (y)
y.R[z] =
successeur de y sur un chemin ´l´mentaire de y ` z
ee a
dans G si z ∈ Γ+ (y)
Dans l’exemple pr´c´dent, les valeurs y.R[4] deviennent :
e e
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-45-320.jpg)
![46 Fermeture transitive
y y.R[4]
1 2
2 4
3 2
4 nil
et l’algorithme de trac´ vers le sommet 4, ex´cut´ ` partir de y=1, affiche 1 2 4.
e e ea
5.4.4.2 Construction des routages par l’algorithme de Roy-Warshall
∀y ∈ X, on consid`re les valeurs initiales de la table y.R :
e
nil si (y,z) ∈ Γ
∀z ∈ X : y.R[z] =
z si (y,z) ∈ Γ
C’est donc l’attribut de routage vers z lorsqu’on se restreint aux chemins de longueur 1. On
modifie alors les op´rations Θx , afin qu’elles mettent ` jour les valeurs des tables R : dans le cas
e a
o` Θx rajoute un arc entre y et z, alors y.R[z] ←y.R[x]. En effet, le chemin ´l´mentaire de y
u ee
a
` z qui vient d’ˆtre rep´r´ passe par x : pour aller de y ` z, on doit d’abord se diriger vers x.
e ee a
D’o` le texte de l’algorithme, modifi´ routage :
u e
ALGORITHME DE ROY-WARSHALL avec ROUTAGE
GRAPHE roy-warshall(GRAPHE G) c’est
local SOMMET x,y,z ; ENS[SOMMET] X;
d´but
e
Result ← G ; X ← G.lst som ;
-- initialisation des tables de routage
pour tout y de X
pour tout z de X
si Result.validarc(y,z) alors y.R[z] ← z sinon y.R[z] ← nil fsi
fpourtout
fpourtout ;
-- op´rations Θ avec gestion des tables de routage
e
pour tout x de X
pour tout y de X
si Result.validarc(y,x) alors
pour tout z de X
si Result.validarc(x,z)
alors
si non Result.valid arc(y,z)
alors Result.ajoutarc(y,z);
y.R[z] ← y.R[x]
fsi
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-46-320.jpg)
![5.4. Algorithme de Roy-Warshall 47
fsi
fpourtout
fsi
fpourtout
fpourtout
fin
5.4.4.3 Exemple d’ex´cution
e
A la main, la repr´sentation la mieux adapt´e est matricielle. Pour g´rer le routage, au lieu
e e e
d’utiliser la matrice bool´enne, nous utilisons la matrice de routage R, telle que
e
y.R[z] si (y,z) ∈ Γ
∀y ∀z : R[y,z] =
0 si (y,z) ∈ Γ
Nous traitons l’exemple suivant (les cases de valeur 0 sont laiss´es vides):
e
1 2 3 4 5 6 7 8 9
1 6
2
3 2 7 8
4 1 5
5 7
6 4
7 8
8 3
9 1 2
Op´ration θ1 : il s’agit de parcourir la colonne num´ro 1, et de s’arrˆter sur toute ligne de valeur
e e e
= 0 (correspondant ` Result.validarc(y,1)). Pour une telle ligne, on effectue la “recopie” des
a
´l´ments non nuls de la ligne 1 sur la ligne y, en mettant la valeur R[y,1] en toute case nulle
ee
R[y,z] telle que R[1,z] = 0 (ce qui correspond `:
a
si Result.validarc(1,z)
alors
si non Result.valid arc(y,1)
alors Result.ajoutarc(y,z);
y.R[z] ← y.R[1]
fsi
fsi
L’application de θ1 ne modifie que les lignes 4 et 9, et donne le tableau suivant :
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-47-320.jpg)
![48 Fermeture transitive
1 2 3 4 5 6 7 8 9
1 6
2
3 2 7 8
4 1 5 1
5 7
6 4
7 8
8 3
9 1 2 1
Le d´tail des diff´rentes ´tapes serait trop long; notons cependant que θ2 ne rajoute aucun arc
e e e
(le sommet 2 est un point de sortie, c’est-`-dire un sommet sans successeur); de mˆme θ9 , car le
a e
sommet 9 est un point d’entr´e (c’est-`-dire un sommet sans pr´d´cesseur). On donne ci-dessous
e a e e
le r´sultat final :
e
1 2 3 4 5 6 7 8 9
1 6 6 6 6 6 6 6 6
2
3 2 8 7 8
4 1 5 5 1 5 1 5 5
5 7 7 7 7
6 4 4 4 4 4 4 4 4
7 8 8 8 8
8 3 3 3 3
9 1 2 1 1 1 1 1 1
A titre d’exemple, on va chercher le trac´ d’un chemin du sommet 1 au sommet 2; on obtient
e
successivement:
R[1,2] = 6; R[6,2] = 4; R[4,2] = 5; R[5,2] = 7; R[7,2] = 8; R[8,2] = 3; R[3,2] = 2
d’o` le chemin : [1,6,4,5,7,8,3,2]
u
5.4.4.4 Preuve
Pour d´montrer la validit´ de cet algorithme, nous ´tablissons les lemmes suivants :
e e e
Lemme 5.10 Si pour un couple (y, z) on a, ` l’issue de l’algorithme,
a
y.R[z] = nil, alors y.R[z] est successeur de y sur le premier chemin
allant de y ` z rencontr´ au cours de l’algorithme.
a e
D´monstration Pour tout y et tout z, la valeur y.R[z] est mise ` jour au plus une fois. En effet,
e a
si (y,z) ∈ Γ, cette affectation a lieu ` l’initialisation, et de plus:
a
Result.validarc(y,z) est v´rifi´. Si (y,z) ∈ Γ, la pr´condition de cette affectation implique :
e e e
¬ Result.validarc(y,z), et sa postcondition implique Result.validarc(y,z) P
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-48-320.jpg)
![5.5. τ -minimalit´
e 49
Lemme 5.11 Si z ∈ Γ+ (y) alors le premier chemin allant de y ` z
a
rencontr´ au cours de l’algorithme est un chemin ´l´mentaire.
e ee
D´monstration Si (y,z) ∈ Γ, ce chemin est un arc et donc il est ´l´mentaire. Supposons
e ee
que tous les chemins rep´r´s jusqu’` l’op´ration Θi−1 incluse soient ´l´mentaires. Soit alors
ee a e ee
u = [y ∗ xi ] · [xi ∗ z] un chemin rep´r´ par l’op´ration Θi , c’est-`-dire tel que l’affectation y.R[z]
ee e a
←y.R[xi ] ait lieu ; si u n’est pas ´l´mentaire, il existe j < i tel que
ee
u = [y ∗ xj ∗ xi ] · [xi ∗ xj ∗ z]
et tous les autres sommets interm´diaires sont dans {x1 , . . . ,xi−1 } et diff´rents de xj , d’apr`s
e e e
l’hypoth`se de r´currence. Mais cela signifie qu’il existe un chemin
e e
u’ = [y ∗ xj ] · [xj ∗ z] avec ∗ ∈ {x1 , . . . ,xi−1 }
et donc
∃ ≤ i − 1 : (y,z) ∈ V
Au cours du pas d’it´ration no l’affectation y.R[z] ←y.R[x ] a donc lieu, et cela contredit
e
l’affectation de y.R[z] lors du pas no i > . P
De ces deux lemmes on d´duit le r´sultat :
e e
Th´or`me 5.12 A l’issue de l’algorithme,
e e
∀z ∈ X : les valeurs R[z] d´finissent un routage vers z
e
5.5 τ -minimalit´
e
La τ -minimalit´ constitue une notion int´ressante du point de vue des possibilit´s de che-
e e e
minement. Il s’agit de mettre en ´vidence un graphe partiel de G, ayant la mˆme fermeture
e e
transitive que G – donc les mˆmes possibilit´s de cheminement – mais minimal au sens o`
e e u
la suppression d’un arc quelconque de ce graphe partiel supprime au moins une possibilit´ de
e
cheminement. Il n’y a en g´n´ral pas unicit´ de la solution.
e e e
D´finition 5.13 La relation binaire sur G(X) :
e
Gτ G ⇔ G+ = G +
est une relation d’´quivalence, appel´e τ -´quivalence.
e e e
La classe de G sera not´e : τ (G)
e
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-49-320.jpg)

![Chapitre 6
M´thodes d’exploration
e
6.1 D´veloppement arborescent issu d’un sommet donn´
e e
D´finition 6.1 On appelle arborescence un graphe
e
A = (S,Θ) tel que :
i) ∃ un sommet s0 ∈ S et un seul tel que Θ−1 (s0 ) = ∅.
ii) ∀s = s0 : Θ−1 (s) poss`de un seul ´l´ment.
e ee
iii) A est sans circuit.
s0 s’appelle racine de A, et tout sommet s sans successeur s’appelle une feuille de l’arborescence.
Un chemin de la racine ` une feuille s’appelle branche de l’arborescence.
a
Soit maintenant G = (X,Γ) un graphe, et x ∈ X. On construit une arborescence Ax de la
mani`re suivante :
e
– x est la racine ,
– It´rativement sur k ≥ 1 : ∀y ∈ Γ[k] (x) : Θ(y) = Γ(y)
e
Ax s’appelle d´veloppement arborescent issu d’un sommet donn´ ; chaque branche de l’arbo-
e e
rescence correspond ` un chemin issu de x (certaines branches peuvent ˆtre infinies).
a e
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-51-320.jpg)


. Mais x ∈ T ⇒ arc visit´(x,z1 ) ⇒
e
sommet visit´(z1 ) ⇒ z1 ∈ A ∪ T = T . En r´p´tant ce raisonnement, on obtient zk ∈ T ⇒
e e e
arc visit´(zk ,y) ⇒ sommet visit´(y) ⇒ y ∈ A ∪ T = T . Donc Γ∗ (x) ⊆ T .
e e
– V ⊆ Γx , par construction.
– Soit (y,z) ∈ Γx . On a donc y ∈ Γ∗ (x), c’est-`-dire y ∈ T d’o` arc visit´(y,z) soit (y,z) ∈ V .
a u e
Donc, Γx ⊆ V .
ii) R´ciproquement, supposons T = Γ∗ (x) ∧ V = Γx ). Si A = ∅, il existe y ∈ A. On a donc
e
y ∈ Γ∗ (x) (car A ⊆ Γ∗ (x)) et ∃z (y,z) ∈ Γ, (y,z) ∈ V . Mais y ∈ Γ∗ (x) ⇒ (y,z) ∈ Γx = V .
Contradiction. Donc A = ∅. P
Progression (* A = ∅ *)
Soit y un sommet de A
Soit S un ensemble de successeurs de y tel que ∀z ∈ S : (y,z) ∈ V .
Pour tout z ∈ S, l’´tat de (y,z) devient visit´
e e
si z est dans l’´tat dehors
e
alors (premi`re visite de z)
e
si Γ(z) = ∅
alors z passe dans l’´tat termin´
e e
sinon z passe dans l’´tat en attente
e
fsi
sinon
z a d´j` ´t´ visit´ ` partir d’un autre de
eaee ea
ses pr´decesseurs
e
fsi
si ∀z ∈ Γ(y) l’´tat de (y,z) est visit´ alors l’´tat de y devient termin´ fsi
e e e e
Valeurs initiales
D = X {x}
A = si Γ(x) = ∅ alors ∅ sinon {x}
T = si Γ(x) = ∅ alors {x} sinon ∅
V = ∅
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-54-320.jpg)


![6.3. Strat´gies d’exploration particuli`res : largeur et profondeur
e e 57
ALGORITHME GENERAL D’EXPLORATION
ENS[SOMMET] D, T; ENS[ARC] V ;
exploration-generale(GRAPHE G; SOMMET x) c’est
local ENS[SOMMET] A, S;
ENS[SOMMET] SOMMET::a visiter ;
SOMMET y, z ;
d´but
e
depuis D ← G.lst som{x} ; V ← ∅ ;
x.a visiter ← G.lst succ(x) ;
si x.a visiter = ∅
alors A ← ∅ ; T ← {x}
sinon A ← {x} ; T ← ∅
fsi
jusqua A = ∅
faire
y ← A.element ;
S ← y.a visiter.sous ensemble;
-- mise ` jour du statut de y
a
y.a visiter ← y.a visiter S;
si y.a visiter=∅ alors A ← A{y} ; T ← T ∪ {y} fsi ;
pour tout z de S
V ← V ∪ {(y,z)} ;
-- mise ` jour du statut de z
a
si z ∈ D alors D ← D{z} ;
z.a visiter ← lst succ(G,z) ;
si z.a visiter = ∅
alors T ← T ∪ {z}
sinon A ← A ∪ {z}
fsi
fsi
fpourtout
fait
-- exploration termin´e : Γ∗ (x) = T , Γx = V
e
fin
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-57-320.jpg)
![58 M´thodes d’exploration
e
6.3.1 Exploration en largeur d’abord
6.3.1.1 Une structure de donn´es : la file
e
Cette strat´gie consiste ` s´lectionner dans A le sommet y le plus anciennement ajout´ et `
e a e e a
choisir S = Γ(y). Au niveau de l’arborescence, cela revient ` effectuer un parcours en largeur (
a
niveau par niveau) : x est visit´, puis tous les arcs issus de x; ensuite, tous les successeurs de x
e
et les arcs qui en sont issus, puis tous les sommets de Γ[2] (x) – qui n’ont pas ´t´ visit´s – , et
ee e
ainsi de suite. L’algorithme qui r´sulte de cette strat´gie visite donc les ´l´ments de Γ∗ (x) dans
e e ee
l’ordre suivant :
k−1
x; Γ(x) {x}; Γ[2] (x) Γ(x) {x}; . . . ; Γ[k] (x) Γ[j] (x); . . .
j=0
Pour cette raison, il est parfois qualifi´ de ”concentrique”.
e
Nous allons mettre en oeuvre cette technique avec une structure de donn´es qui s’appelle
e
une file. Une file est une liste sur laquelle les seules modifications possibles sont :
1. ajout d’un ´l´ment en queue (mettreenfile)
ee
2. retrait de l’´l´ment de tˆte (oterdefile)
ee e
On dit encore que cette liste est g´r´e selon la discipline P.A.P.S. (Premier Arriv´ Premier
ee e
Sorti) ou F.I.F.O. (First In First Out).
Nous consid´rons une file comme un type abstrait et la d´claration
e e
FILE[E] f d´clare un objet f de type file d’objets de type E.
e
Les primitives d’acc`s sont :
e
creer cr´e une nouvelle file, vide
e
BOOL filevide pr´dicat ` valeur vrai si et seulement si la file courante est vide
e a
mettreenfile(E v) ajoute l’objet d´sign´ par v en queue de file
e e
E oterdefile d´livre le premier ´l´ment et l’enl`ve de la file.
e ee e
Le principe de mise en œuvre est alors le suivant : pour le sommet y en tˆte de file, on examine
e
s´quentiellement tous les successeurs et chacun d’eux est imm´diatement ajout´ en queue de file
e e e
s’il n’a pas encore ´t´ visit´; puis y est ˆt´ de la file puisqu’il ne peut plus apporter d’information
ee e oe
nouvelle. Il est donc inutile, avec cette strat´gie, de g´rer les ensembles de successeurs a visiter,
e e
puisque tous les arcs issus du sommet s´lectionn´ (tˆte de file) sont visit´s lors du mˆme pas
e e e e e
d’it´ration.
e
6.3.1.2 Texte de l’algorithme
Le texte de l’algorithme est donn´ ci-apr`s, page 59.
e e
6.3.1.3 Exemple d’ex´cution
e
La figure 6.2 montre le r´sultat de l’exploration en largeur d’abord issue du sommet 1 dans
e
le graphe de la figure 6.1
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-58-320.jpg)
![6.3. Strat´gies d’exploration particuli`res : largeur et profondeur
e e 59
EXPLORATION LARGEUR D’ABORD
ENS[SOMMET] D, T;
ENS[ARC] V;
exploration-largeur(GRAPHE G; SOMMET x) c’est
local ENS[SOMMET] S; -- ensemble des successeurs de la tˆte de file
e
FILE[SOMMET] A;
SOMMET y, z;
d´but
e
depuis D ← G.lst som{x} ;
A.creer ; A.mettreenfile(x) ;
T ← ∅; V ← ∅;
jusqua A.filevide
faire
y ← A.oterdefile ; T ← T ∪ {y} ;
S ← G.lst succ(y) ;
pour tout z de S
V ← V ∪ {(y,z)} ;
si z ∈ D
alors D ← D{z} ; A.mettreenfile(z)
fsi
fpourtout
fait
-- exploration termin´ee
fin
6.3.2 Recherche en profondeur d’abord
6.3.2.1 Une structure de donn´es : la pile
e
Cette recherche consiste ` s´lectionner dans A le sommet y le plus r´cemment ajout´, et pour
a e e e
S un arc non visit´ issu de y. Au niveau de l’arborescence, cela revient ` effectuer un parcours
e a
en descendant le plus loin possible sur chaque branche. Lorsqu’un sommet est rencontr´ : e
– s’il est dans l’´tat dehors, il devient en attente
e
– s’il n’est pas dans l’´tat dehors, il marque l’arrˆt de la descente, et la recherche reprend `
e e a
partir de son pr´d´cesseur dans l’arborescence.
e e
Pour mettre en oeuvre cette technique, on utilise une structure de donn´es qui s’appelle une
e
pile; il s’agit d’une liste sur laquelle les seules modifications possibles sont :
1. ajout d’un ´l´ment en queue de liste (empiler)
ee
2. retrait du dernier ´l´ment de la liste (d´piler).
ee e
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-59-320.jpg)
![60 M´thodes d’exploration
e
file D R arborescence
1 2, 3, 4, 5, 6, 7 ∅ 1
2, 4 3, 5, 6, 7 1 2 4
4, 3, 6 5, 7 1, 2 3 6
3, 6 5, 7 1, 2, 4 2
6 5, 7 1, 2, 4, 3 4 6
7 5 1, 2, 4, 3, 6 7
5 1, 2, 4, 3, 6, 7 2
R = Γ (1) = {1,2,3,4,6,7} = X {5}
V = Γ1 = {(1,2),(1,4),(2,3),(2,6),(3,4),(3,6),(4,2),(6,7),(7,2)} = Γ {(5,4)}
Fig. 6.2 – exploration en largeur
L’´l´ment de queue de cette liste est aussi d´sign´ sous le nom de sommet de pile.
ee e e
On dit encore que cette liste est g´r´e selon la discipline DAPS (Dernier Arriv´ Premier
ee e
Sorti) ou encore LIFO (Last In First Out).
Nous consid´rons donc une pile comme un type abstrait, et la d´claration
e e
PILE[E] d´clare une liste d’objets de type E g´r´s en pile.
e ee
Les op´rations sur les piles sont alors :
e
creer cr´e une nouvelle pile vide
e
BOOL pilevide pr´dicat ` valeur vrai si et seulement si la pile est vide
e a
empiler(E z) ajout de z en queue
d´piler
e retrait de l’´l´ment de queue (erreur si la pile est vide)
ee
E sommetpile d´livre la valeur du sommet de pile (consultation sans d´piler)
e e
6.3.2.2 Texte de l’algorithme
Il est donn´ ci-apr`s, page 61
e e
6.3.2.3 Exemple d’ex´cution
e
La figure 6.3 montre le r´sultat de l’exploration en profondeur d’abord issue du sommet 1
e
dans le graphe de la figure 6.1
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-60-320.jpg)
![6.3. Strat´gies d’exploration particuli`res : largeur et profondeur
e e 61
EXPLORATION PROFONDEUR D’ABORD
ENS[SOMMET] D, T;
ENS[ARC] V;
recherche-profondeur(GRAPHE G; SOMMET x) c’est
local PILE[SOMMET] A;
ENS[SOMMET] SOMMET::a visiter ;
SOMMET y; -- sommet de pile
SOMMET z; -- sommet courant
d´but
e
depuis
D ← G.lst som{x} ; V ← ∅
A.creer ; x.a visiter ← G.lst succ(x) ;
si x.a visiter = ∅
alors T ← {x}
sinon A.empiler(x); T ← ∅
fsi ;
jusqua A.pilevide
faire
y ← A.sommetpile ;
si y.a visiter = ∅
alors
z ← (y.a visiter).element ;
y.a visiter ← y.a visiter{z} ;
V ← V ∪ {(y,z)} ;
si z ∈ D alors
D ← D{z} ;
z.a visiter ← G.lst succ(z) ;
si z.a visiter = ∅
alors T ← T ∪ {z}
sinon A.empiler(z)
fsi
fsi
sinon T ← T ∪ {y} ; A.depiler
fsi
fait
-- exploration termin´e e
fin
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-61-320.jpg)

![6.4. Exemple d’application : calcul de l’ensemble des descendants 63
ce dernier contenant ` tout instant du calcul l’ensemble des sommets reconnus comme
a
descendants de x, c’est-`-dire A ∪ T . En effet,
a
– y ∈ D ⇔ y ∈ DESC
– y ∈ T ⇔ y ∈ A ∧ y ∈ DESC
6.4.1 Cas de la recherche en largeur
Nous donnons le texte de l’algorithme simplifi´ dans le cas de l’exploration en largeur (page
e
63).
CALCUL DES DESCENDANTS : LARGEUR D’ABORD
ENS[SOMMET] DESC;
descendants-largeur(GRAPHE G;SOMMET x) c’est
local ENS[SOMMET] S;
FILE[SOMMET] A;
SOMMET y, z ;
d´but
e
depuis
DESC ← {x} ; A.creer ; A.mettreenfile(x)
jusqua A.filevide
faire
y ← A.oterdefile ;
S ← G.lst succ(y) ;
pour tout z de S
si z ∈ DESC
alors
DESC ← DESC ∪ {z} ;
A.mettreenfile(z)
fsi
fpourtout
fait
fin
La figure 6.4 montre, ` titre de comparaison avec l’exploration compl`te (figure 6.2), le
a e
r´sultat de la recherche des descendants du sommet 1 dans le graphe de la figure 6.1
e
6.4.2 Cas de la recherche en profondeur : expression r´cursive
e
Le texte de cet algorithme est donn´ page 65
e
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-63-320.jpg)

![´
6.5. Enum´ration des chemins ´l´mentaires issus de x
e ee 65
CALCUL DES DESCENDANTS : FORMULATION RECURSIVE
ENS[SOMMET] DESC;
desc local (SOMMET y) c’est
local ENS[SOMMET] S;
SOMMET z;
d´but
e
DESC ← DESC ∪ {y} ;
S ← G.lst succ(y) ;
pour tout z de S faire
si z ∈ DESC alors desc local(z) fsi
fpourtout
fin
descendants-recursif(GRAPHE G; SOMMET x) c’est
d´but
e
DESC ← ∅ ; desc local(x)
fin
x . . . t y l’´tat de la pile. Montrons qu’elle reste v´rifi´e ` la fin du pas.
e e e a
cas 1 Le pas courant ne modifie pas l’´tat de la pile. Ce cas est trivial;
e
cas 2 Le pas courant effectue une op´ration d´piler; le r´sultat est ´vident puisqu’un
e e e e
chemin ´l´mentaire priv´ de son dernier sommet reste un chemin ´l´mentaire; ici, le
ee e ee
chemin obtenu va de x ` t, ce dernier sommet ´tant le sommet de pile;
a e
cas 3 Le pas courant effectue une op´ration empiler. Soit z le sommet empil´. Par construc-
e e
tion, z est un successeur de y, donc le nouvel ´tat de la pile x . . . t y z est bien un
e
chemin de x au sommet de pile z. De plus le sommet z ´tant empil´ ` cette ´tape, il
e ea e
appartenait ` D, donc ne figurait pas dans la pile au d´but du pas; par cons´quent,
a e e
l’´tat de la pile ` la fin du pas est un chemin ´l´mentaire.
e a ee
P
Par rapport ` l’algorithme d’exploration vu au §6.3.2, il faut consid´rer toutes les occurrences
a e
possibles d’un sommet dans l’arborescence d’exploration : chacune d’elles, provenant d’un pr´d´cesseur
e e
diff´rent, engendre un nouvel ensemble de chemins via sa descendance. Ainsi, la progression doit
e
ˆtre modifi´e de la mani`re suivante :
e e e
Progression Soit y le sommet de la pile; s´lectionner un successeur de y, non encore visit´. S’il
e e
n’y en a pas, alors d´piler y, qui passe dans l’´tat termin´; s’il y en a un soit z ; si z ∈ A
e e e
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-65-320.jpg)

![68 M´thodes d’exploration
e
ENUMERATION DES CHEMINS ELEMENTAIRES
ENS[SOMMET] D, T
ENS[ARC] V;
enumeration-chemins(GRAPHE G; SOMMET x) c’est
local PILE[SOMMET] A;
ENS[SOMMET] SOMMET.a visiter ;
SOMMET y; -- sommet de pile
SOMMET z; -- sommet courant
d´but
e
depuis
D ← G.lst som{x} ;
A.creer;
x.a visiter ← G.lst succ(x){x} ;
si x.a visiter = ∅ alors A.empiler(x) fsi
jusqua A.pilevide
faire
y ← A.sommetpile ;
si y.a visiter = ∅
alors
z ← (y.a visiter).element ;
y.a visiter ← y.a visiter{z} ;
si z ∈ A
alors
si z ∈ D alors D← D{z} fsi ;
z.a visiter ← G.lst succ(z) ;
A.empiler(z) ;
A.ecrirechemin
sinon A.ecrirecircuit(z)
fsi
sinon T ← T ∪ {y} ; A.depiler
fsi
fait
fin
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-68-320.jpg)
![´
6.5. Enum´ration des chemins ´l´mentaires issus de x
e ee 69
ENUMERATION DES CHEMINS ELEMENTAIRES : VERSION RECURSIVE
ENUM[dehors, en attente, termin´] SOMMET::etat ;--
e type ´num´r´
e e e
PILE[SOMMET] chemin courant ;
enumerer(SOMMET y) c’est
-- pre : y.etat=en attente
local SOMMET z
d´but
e
pour tout z de G.lst succ(y)
-- y est le p`re de z dans l’arborescence d’exploration
e
cas
z.etat= dehors,termin´ →
e
chemin courant.empiler(z) ;
chemin courant.ecrirechemin ;
z.etat ← en attente ;
enumerer(z)
z.etat=en attente →
chemin courant.ecrirecircuit(z)
fcas
fpourtout;
chemin courant.depiler ;
-- le sommet y est d´pil´
e e
y.etat ← termin´e
fin -- enumerer
enumeration-recursive(GRAPHE G; SOMMET x) c’est
d´but
e
chemin courant.creer ;
pour tout y de G.lst som
y.etat ← dehors
fpourtout ;
x.etat ← en attente ;
chemin courant.empiler(x);
enumerer(x)
fin
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-69-320.jpg)


![7.1. D´termination de l’existence de circuits
e 73
EXISTENCE DE CIRCUITS : MARIMONT
BOOL marimont(GRAPHE G) c’est
local GRAPHE H ; -- graphe de travail
ENS[SOMMET] E, S; -- points d’entr´e, de sortie
e
BOOL h vide ;
d´but
e
depuis
H ← G ; h vide ← H.vide ;
si non h vide alors
E ← H.points entree ;
S ← H.points sortie
fsi ;
jusqua h vide ou E= ∅ ou S =∅
faire
H ← H.sous graphe(G.lst som E ∪ S) ; h vide ← H.vide ;
si non h vide alors
E ← H.points entree;
S ← H.points sortie
fsi
fait ;
-- ici, h vide ou E = ∅ ou S = ∅
Result ← non h vide
fin
7.1.2.3 Complexit´
e
Dans le cas le pire (tous les sommets de G sont ˆt´s, et seulement 2 sommets ` chaque pas
oe a
d’it´ration), il y a n/2 pas d’ it´ration. Le pas n
e e o k n´cessite
e
1 acc`s points entr´e
e e
1 acc`s points sortie
e
sur un sous-graphe ` n − 2(k − 1) sommets, soit :
a
n − 2k + 2 acc`s lst pred
e
n − 2k + 2 acc`s lst succ
e
Au total, il y a donc au pire :
n/2
(n − 2k + 2) acc`s lst pred et autant d’acc`s lst succ.
e e
k=1
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-73-320.jpg)
![74 Circuits. Composantes fortement connexes
Mais :
n/2 n(n+2)
4 si n est pair,
(n − 2k + 2) = (n+1)2
k=1 4 si n est impair
soit O(n2 ) acc`s lst pred, lst succ.
e
7.2 Application des graphes sans circuit : fonction ordinale
D´finition 7.2 On appelle fonction ordinale d’un graphe G = (X,Γ)
e
une fonction f : X → N telle que
(x,y) ∈ Γ ⇒ f (x) < f (y)
On peut aussi d´finir une fonction ordinale inverse f t , qui n’est autre qu’une fonction ordinale
e
du graphe transpos´ :
e
(x,y) ∈ Γ ⇒ f t (x) > f t (y)
Th´or`me 7.3 Un graphe poss`de une fonction ordinale si et seulement
e e e
si il est sans circuit.
D´monstration. Supposons que G poss`de une fonction ordinale, et qu’il ait un circuit :
e e
γ = [xi1 ,xi2 , . . . ,xik ,xi1 ]
On a :
f (xi1 ) < f (xi2 ) < . . . < f (xik ) < f (xi1 )
d’o`, par transitivit´ :
u e
f (xi1 ) < f (xi1 )
ce qui est absurde.
R´ciproquement supposons G sans circuit et consid´rons l’algorithme de Marimont ne
e e
prenant en compte que les points d’entr´e. Au pas d’it´ration no k, le sous-graphe courant a des
e e
points d’entr´e E. On pose alors, par d´finition :
e e
∀x ∈ E : f (x) = k (k = 1,2, . . . ,p)
o` p est le nombre de pas, major´ par n.
u e
f d´finit bien une fonction ordinale : si (y,z) ∈ Γ alors le sommet y est ˆt´ avant le sommet
e oe
z, car z ne peut pas ˆtre point d’entr´e d’un sous-graphe poss´dant le sommet y ; donc : (y,z) ∈
e e e
Γ ⇒ f (y) < f (z).
De plus, tous les sommets ´tant ˆt´s, f est bien d´finie sur X. P
e oe e
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-74-320.jpg)



![78 Circuits. Composantes fortement connexes
On pr´cise d’abord la notion de graphe fortement anti-transitif :
e
D´finition 7.6 Un graphe est fortement anti-transitif si (∃u = [x ∗ y] ∧
e
|u| ≥ 2) ⇒ (x,y) ∈ Γ.
Autrement dit, aucun chemin de longueur sup´rieure ou ´gale ` 2 ne peut ˆtre sous-tendu
e e a e
par un arc.
On a le r´sultat suivant :
e
Proposition 7.7 Soit G = (X,Γ) un graphe sans circuit. Il existe un
seul graphe partiel de G τ -minimal τ -´quivalent ` G (D´f. 5.13 et 5.14).
e a e
∨
Ce graphe G est un ´l´ment maximal de l’ensemble des graphes partiels
ee
de G fortement anti-transitifs.
D´monstration. Soit τ (G) la classe d’´quivalence de G. Si H ∈ τ (G), alors H est sans circuit.
e e
En effet, si H poss´dait un circuit passant par x, alors (x,x) serait une boucle de H + (= G+ ) et
e
G aurait un circuit passant par x.
Supposons alors que τ (G) ait deux ´l´ments minimaux G1 = (X,Γ1 ) et G2 = (X,Γ2 ) et soit
ee
(x,y) ∈ Γ1 et (x,y) ∈ Γ2
On a donc (x,y) ∈ Γ+ = Γ+ d’o` :
1 2 u
∃z ∈ X,z = x,z = y : (x,z) ∈ Γ+ ∧ (z,y) ∈ Γ+
2 2
soit encore :
(x,z) ∈ Γ+ ∧ (z,y) ∈ Γ+
1 1
Mais aucun chemin allant de x ` z dans G1 ne peut passer par y, sans quoi on aurait :
a
(y,z) ∈ Γ+ ∧ (z,y) ∈ Γ+ ⇒ (y,y) ∈ Γ+ donc G1 aurait un circuit.
1 1 1
De mˆme, aucun chemin allant de z ` y dans G1 ne peut passer par x.
e a
Il existe donc, dans G1 , un chemin allant de x ` y, distinct de l’arc (x,y), ce qui contredit la
a
∨
τ -minimalit´ de G1 . L’hypoth`se (x,y) ∈ Γ1 et (x,y) ∈ Γ2 est donc absurde, d’o` G1 = G2 =G.
e e u
D’autre part on sait que dans une partie finie, l’unicit´ de l’´l´ment minimal en fait un
e ee
∨
minimum, c’est ` dire un ´l´ment comparable ` tous les ´l´ments de cette partie. G est donc un
a ee a ee
graphe partiel de G.
∨
Enfin, montrons que G est un ´l´ment maximal de l’ensemble des graphes partiels de G,
ee
∨
fortement anti-transitifs. On remarque d’abord que G est le seul graphe fortement anti-transitif
de τ (G). En effet, soit H = (X,Σ), H ∈ τ (G) et H fortement anti-transitif. Alors : ∀H =
(X,Σ ) H, H’ est fortement anti-transitif. Soit (x,y) ∈ Σ et (x,y) ∈ Σ . Alors (x,y) ∈ Σ + et
∨
par cons´quent, H ∈ τ (G) d’o` on conclut que H est minimal dans τ (G), et donc H = G.
e u
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-78-320.jpg)

![80 Circuits. Composantes fortement connexes
a b
d c f
g e
Fig. 7.3 – Fermeture τ -mininale
GRAPHE SANS CIRCUIT : τ -MINIMALITE
GRAPHE tau-minimalite(GRAPHE G) c’est
local GRAPHE G1, G2 ;
SOMMET x, y, z; ENS[SOMMET] X;
d´but
e
G1 ← G ; G2 ← G ; X ← G.lst som ;
pour tout x de X
pour tout y de X
si G2.validarc(y, x) alors
pour tout z de X
si G2validarc(x, z) alors
G1.oter arc(y,z) ; G2.ajout arc(y,z)
fsi
fpourtout
fsi
fpourtout
fpourtout ;
si existe x de G2.lst som telque G2.validarc(x, x)
alors -- G a un circuit : pas de fermeture τ -minimale
sinon Result ← G1
fsi
fin
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-80-320.jpg)


![7.4. Composantes fortement connexes 83
7.4.2 Algorithme de FOULKES
Cet algorithme s’applique ` la fermeture transitive G+ de G. (Il suppose donc celle-ci d´j`
a ea
d´termin´e). Il est bas´ directement sur la d´finition, qui peut s’´crire encore :
e e e e e
xRy ⇔ (x = y) ∨ (x,y) ∈ Γ+ ∧ (y,x) ∈ Γ+
7.4.2.1 Principe
Il est tr`s simple, et s’appuie sur trois constatations :
e
– un sommet appartient ` sa propre classe
a
– un sommet ne peut appartenir qu’` une seule classe
a
– si un sommet n’est pas son propre descendant, il est seul dans sa classe (il n’est pas situ´
e
sur un circuit).
Les sommets sont examin´s s´quentiellement; soit x le sommet courant. Trois cas sont ` distin-
e e a
guer quant ` la situation de x :
a
1. x a d´j` ´t´ rang´ comme ´l´ment de la classe d’un sommet y examin´ avant lui (c’est-`-dire
eae e e ee e a
y ≤ x). Dans ce cas, cl(x) = cl(y) (d´j` calcul´e)
ea e
2. x n’est pas encore class´ et n’est pas son propre descendant, c’est-`-dire (x,x) ∈ Γ+ . Dans
e a
ce cas, cl(x) = {x}.
3. x n’est pas encore class´, et (x,x) ∈ Γ+ . Dans ce cas, les ´l´ments de cl(x), outre x lui-
e ee
mˆme, sont ` rechercher parmi les y tels que y > x; en effet, s’il existait y ≤ x avec
e a
y ∈ cl(x), x aurait ´t´ class´ lors de l’examen de y, ant´rieur ` celui de x.
ee e e a
L’analyse de l’algorithme en d´coule imm´diatement :
e e
Invariant (1 ≤ x ≤ n) ∧
P RIS = {y | cl(y) est calcul´ } ∧
e
{1 .. x − 1} ⊆ P RIS
Condition d’arrˆt x = n
e
Progression cas x ∈ P RIS ⇒
cl(x)←cl(y)
(x ∈ P RIS) ∧ ((x,x) ∈ Γ+ ) ⇒
cl(x)←{x}
(x ∈ P RIS) ∧ ((x,x) ∈ Γ+ ) ⇒
cl(x)←{x};
pourtout y de [x + 1..n] faire
si ((x,y) ∈ Γ+ ) ∧ ((y,x) ∈ Γ+ ) alors
cl(x)←cl(x) ∪ {y} ;
fsi
fpour
fcas ;
P RIS←P RIS ∪ cl(x) ;
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-83-320.jpg)
![84 Circuits. Composantes fortement connexes
x←x + 1
Valeurs initiales x←1 ; P RIS←∅
7.4.2.2 Texte de l’algorithme
Il est donn´ page 84
e
ALGORITHME DE FOULKES
ENS[SOMMET] SOMMET::cl : ;
foulkes(GRAPHE G+ ) c’est
local ENS[SOMMET] PRIS;
SOMMET x, y;
d´but
e
PRIS ← ∅ ;
pour x depuis 1 jqa n faire
si x ∈ PRIS alors
x.cl ←{x} ;
si G+ .validarc(x, x) alors
-- x est sur un circuit ; recherche des sommets de sa classe
pour y depuis x + 1 jqa n faire
si G+ .validarc(x, y) et G+ .validarc(y, x)
alors x.cl ← x.cl ∪{y}
fsi
fpour ;
pour tout y de x.cl faire y.cl ← x.cl fpourtout ;
PRIS ← PRIS ∪ x.cl
fsi
fsi
fpour
fin
7.4.2.3 Complexit´
e
– construction de la fermeture transitive : au moins O(n3 )
– le nombre d’acc`s validarc est ≤ n2
e
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-84-320.jpg)

![86 Circuits. Composantes fortement connexes
COMPOSANTES FORTEMENT CONNEXES :
ASCENDANTS-DESCENDANTS
ENS[SOMMET] SOMMET::cl : ;
ascendants-descendants(GRAPHE G) c’est
local ENS[SOMMET] D, A, PRIS;
d´but
e
-- initialisation
PRIS ← ∅ ;
-- classement
pour tout x de G.lst som
si x ∈ PRIS alors
A ← asc non pris(x) ; D ← desc non pris(x) ;
x.cl ← A ∩ D ;
pour tout y de x.cl faire y.cl ← x.cl fpourtout ;
PRIS ← PRIS ∪ x.cl
fsi
fpourtout
fin
ENS[SOMMET] S;
ENS[SOMMET] asc non pris (SOMMET x) c’est
d´but
e
S ← ∅ ; anp(x) ; Result ← S
fin;
anp(SOMMET y) c’est
local ENS[SOMMET] E;
SOMMET z;
d´but
e
S ← S ∪{y} ; E ← G.lst pred(y) ;
E ← E PRIS ;
pour tout z de E faire
si z ∈ S alors anp(z) fsi
fpourtout
fin;;
ENS[SOMMET] desc non pris (SOMMET x) c’est ;
-- identique ` asc non pris en rempla¸ant lst pred par lst succ
a c
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-86-320.jpg)




![7.4. Composantes fortement connexes 91
ENT SOMMET::pospile d´finit la position de y dans la pile (non d´fini si y n’a
e e
pas encore ´t´ atteint).
ee
ENT SOMMET::marque - 0 si y n’a pas encore ´t´ atteint,
ee
- y.pospile lorsque y est empil´, e
- puis, ´ventuellement diminu´e lorsque y est rep´r´
e e ee
comme appartenant ` la c.f.c. d’un sommet empil´
a e
avant lui.
SOMMET SOMMET::pred p`re du sommet y dans l’arborescence d’exploration.
e
ENS[SOMMET] SOMMET::S ensemble des successeurs de y, dans le sous- graphe
partiel des sommets non class´s, qui ne sont pas encore
e
empil´s (comme dans l’algorithme d’´num´ration des
e e e
chemins ´l´mentaires).
ee
ENT SOMMET::ncl num´ro de la c.f.c. ` laquelle appartient y (ind´fini tant
e a e
que y n’est pas class´).
e
Le texte de l’algorithme est donn´ page 92 et suivantes.
e
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-91-320.jpg)
![92 Circuits. Composantes fortement connexes
ALGORITHME DE TARJAN
tarjan(GRAPHE G) c’est
local PILE[SOMMET] L;
ENS[SOMMET] NC; -- sommets non class´s
e
SOMMET finchemin, z ;
ENT compt ; -- compteur du num´ro de la cfc courante
e
d´but
e
depuis NC ← G.lst som ; L.creer ; compt ← 0 ;
pourtout y de NC y.marque ← 0 fpourtout ;
jusqua NC = ∅
faire
finchemin ← ´l´ment(NC) ; L.empiler(finchemin) ;
ee
finchemin.S ← G.lst succ(finchemin) ;
finchemin.S ← finchemin.S ∩ NC ;
finchemin.marque ← L.taille ;
finchemin.pospile ← L.taille ;
depuis
jusqua L.vide
faire
si finchemin.S = ∅
alors z ← ´l´ment(finchemin.S) ;
ee
si z.marque = 0
alors L.empiler(z) ;
z.S ← G.lst succ(z) ;
z.S ← z.S ∩ NC ;
z.marque ← L.taille ;
z.pospile ← L.taille ;
z.pred ← finchemin ;
finchemin ← z
sinon si finchemin.marque > z.marque
alors finchemin.marque ← z.marque
fsi
fsi
sinon si finchemin.marque = finchemin.pospile
alors z ← finchemin ;
finchemin ← z.pred ;
finchemin.marque ← z.marque
sinon -- sortie d’une nouvelle cfc
depuis compt ← compt + 1 ;
jusqua L.taille < finchemin.pospile
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-92-320.jpg)


![7.4. Composantes fortement connexes 95
GRAPHE SANS CIRCUIT : ROY-WARSHALL SIMPLIFIE
GRAPHE roy warshall conforme(GRAPHE G) c’est
local SOMMET x, y, z
d´but
e
Result ← G ;
pour x depuis 2 jqa n-1
pour y depuis 1 jqa x-1
si Result.validarc(y, x) alors
pour z depuis x+1 jqa n
si Result.validarc(x, z) alors Result.ajoutarc(y, z) fsi
fpour
fsi
fpour
fpour
fin
Le nombre maximum d’op´rations est alors :
e
n−1
n(n − 1)(n − 2) n3
(x − 1)(n − x) =
6 6
x=2
en termes d’acc`s validarc, ajoutarc
e
Consid´rons alors le proc´d´ suivant :
e e e
1. Appliquer l’algorithme de Tarjan pour obtenir le graphe r´duit GR , avec une num´rotation
e e
conforme inverse .
2. Appliquer l’algorithme de Roy-Warshall am´lior´ au graphe GR
e e
+
3. Pour tout couple (Ci ,Cj ) ∈ GR tel que card(Ci ) > 1 ou card(Cj ) > 1 rajouter ` G tous a
les arcs (x,y) avec x ∈ Ci ,y ∈ Cj
4. A l’int´rieur de chaque c.f.c., cr´er tous les arcs (x,y).
e e
S’il y a p composantes C1 ,C2 , . . . ,Cp , de cardinal respectif k1 ,k2 , . . . ,kp , et si on d´signe par
e
m le nombre d’arcs de G, la complexit´ est en :
e
– O(n) acc`s lst succ pour le 1)
e
3
– p6 pour le 2)
– au plus
2 p−1
n n2 (p − 1)
(p − i) =
p 2p
i=1
pour le 3)
[maximum obtenu lorsque k1 = k2 = . . . = kp = n ]
p
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-95-320.jpg)

![Chapitre 8
Chemins de valeur optimale
8.1 D´finitions et probl`mes pos´s
e e e
Nous avons vu au chapitre 2 que les arcs d’un graphe peuvent ˆtre munis d’attributs de
e
diff´rents types: pour un graphe non valu´, ces attributs sont de type bool´en (l’arc existe ou
e e e
n’existe pas), pour un graphe mod´lisant des distances, ce seront des attributs de type num´rique,
e e
etc. Les attributs peuvent ˆtre statiques (donn´s avec le graphe) ou dynamiques (calcul´s lors de
e e e
l’ex´cution d’un algorithme: cf. par exemple le chapitre 10 sur les flots). Dans ce chapitre et les
e
suivants, nous allons manipuler des graphes valu´s sur les arcs, c’est-`-dire des graphes dont un
e a
attribut d’arc est pr´cis´ dans la d´finition du graphe, avec sa valeur (attribut statique).
e e e
D´finition 8.1 On appelle graphe valu´ un doublet G = (X,v), o` v est
e e u
une fonction d´finie sur X × X et ` valeurs dans un ensemble E.
e a
Nous supposerons que l’ensemble E poss`de une loi de composition ⊗, associative et munie d’un
e
´l´ment neutre e et d’un ´l´ment absorbant α :
ee ee
∀w ∈ E : w ⊗ e = e⊗w = w
∀w ∈ E : w ⊗ α = α⊗w = α
w1 ⊗ w2 = α ⇒ w1 = α ∨ w2 = α
L’´l´ment absorbant α permet de caract´riser l’ensemble Γ des arcs de la mani`re suivante:
ee e e
(x,y) ∈ Γ ⇔ v(x,y) = α
Exemples :
E ⊗ e α
1) B={vrai, faux} ∧ vrai faux (valeurs d’existence)
2) R + 0 ∞ (valeurs additives)
3) [0 , 1] × 1 0 (probabilit´s)
e
4) N ∪ {∞} min ∞ 0 (capacit´s)
e
L’associativit´ de la loi ⊗ permet de prolonger v ` l’ensemble des suites de sommets de
e a
longueur ≥ 2:
v[x1 , . . . ,xp ] = v(xj ,xj+1 )
j=1...p−1
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-97-320.jpg)
![98 Chemins de valeur optimale
De plus, l’´l´ment α caract´rise les chemins de la mani`re suivante:
ee e e
Proposition 8.2 Soit [x1 , . . . ,xp ] (p ≥ 2) une suite de sommets de X.
Cette suite d´finit un chemin de G si,et seulement si:
e
v[x1 , . . . ,xp ] = α
D´monstration
e
v[x1 , . . . ,xp ] = j=1...p−1 v(xj ,xj+1 ) =α⇔
∀j, 1 = j = p − 1 ⇒ (xj ,xj+1 ) ∈ Γ ⇔
[x1 , . . . ,xp ] est un chemin de G
P
Le but de ce chapitre ´tant l’´tude de chemins de valeur optimale, il nous faut d´finir un
e e e
crit`re de comparaison sur les valeurs des chemins. Autrement dit, ´tant donn´ deux sommets x
e e e
et y et deux chemins reliant x ` y, lequel des deux est pr´f´rable? Pour cela, l’ensemble E doit
a ee
aussi ˆtre muni d’une relation d’ordre totale, not´e , telle que:
e e
i) est compatible avec ⊗, c’est-`-dire:
a
w1 w2 ⇒ w1 ⊗ w3 w2 ⊗ w3 ∧
w3 ⊗ w1 w3 ⊗ w2
ii) α est maximum pour :
∀w ∈ E : w α
Soit alors deux suites u1 = [x,y1 , . . . ,yk ,y], u2 = [x,z1 , . . . ,zp ,y]. On dira que u1 est meilleur
que u2 si, et seulement si: v(u1 ) v(u2 ).
En particulier, une suite d´finissant un chemin sera toujours pr´f´r´e ` une suite ne d´finissant
e eee a e
pas de chemin, grˆce ` la propri´t´ ii) ci-dessus.
a a ee
Exemples de relations d’ordre:
E ⊗ α
B={vrai, faux} ∧ faux vrai<faux existence
R + ∞ ≤ valeurs additives minimales
[0,1] × 0 ≥ probabilit´s maximales
e
N ∪ {∞} min 0 ≥ capacit´s maximales
e
Ces d´finitions ´tant donn´es, nous posons
e e e les probl`mes :
e
Probl`me 8.1 (x-optimal-y) Soit x,y deux sommets donn´s de G =
e e
(X,Γ,v). D´terminer un chemin u = (x ∗ y) de G, de valeur optimale
e
parmi tous les chemins de x ` y dans G.
a
Probl`me 8.2 (x-optimal ou optimal-y) Il s’agit du probl`me x-
e e
optimal-y pour tout y ∈ X (resp. x-optimal-y pour tout x ∈ X) : chemins
de valeur optimale issus de x (resp. aboutissant ` y)
a
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-98-320.jpg)
![8.2. Chemins de valeur additive minimale issus d’un sommet donn´
e 99
Probl`me 8.3 (∗-optimal-∗) Il s’agit du probl`me x-optimal pour tout
e e
x ∈ X (chemins de valeur optimale entre tous les couples de sommets).
L’optimalit´ est ` prendre, bien sˆr, au sens de la relation d’ordre sur E.
e a u
Dans ce qui suit, et jusqu’au paragraphe 8.8, nous prendrons :
E ≡ R; ⊗ ≡ +; ≡≤
c’est-`-dire le cas des valeurs additives minimales. Ceci n’est pas une restriction car nous verrons
a
au §8.8 comment adapter les r´sultats et algorithmes aux autres cas, sous r´serve d’une structure
e e
ad´quate de (E, ⊗ , )
e
Nous ´tudions successivement les probl`mes de type 8.2 (et 8.1 comme cas particulier) avec
e e
plusieurs algorithmes, puis les probl`mes de type 8.3 dans le cadre de la transformation d’algo-
e
rithmes.
8.2 Chemins de valeur additive minimale issus d’un sommet
donn´
e
Nous supposons, dans cette section, que les sommets sont num´rot´s de 1 ` n, et que le
e e a
sommet de d´part est le sommet de num´ro 1 (quitte ` renum´roter).
e e a e
8.2.1 Existence
Proposition 8.3 Le probl`me 1-minimal admet des solutions si et
e
seulement si le sous-graphe G1 = (Γ∗ (1),Γ1 ) ne contient pas de circuit
de valeur < 0.
D´monstration. Soit c = [x ∗ x] un circuit de valeur ρ < 0 dans G1 . Comme x ∈ Γ∗ (1),
e
∃γ = [1 ∗ x] de valeur ω; par suite, γ.c a pour valeur ω + ρ, γ.c.c a pour valeur ω + 2ρ, ...,
∀k ∈ N : γ.ck a pour valeur ω + kρ d’o` :
u
lim (ω + kρ)] = −∞
k→∞
Donc la valeur des chemins de 1 ` x n’est pas minor´e, et il en est de mˆme pour tous les
a e e
descendants de x.
R´ciproquement, si G1 n’a pas de circuit de valeur < 0, alors : si u est un chemin de 1 `
e a
x et ue un chemin ´l´mentaire, inclus dans u, de 1 ` x, on a : v(u) ≥ v(ue ) ≥ min v(ue ) (o`
ee a u
min v(ue ) d´note le minimum des valeurs des chemins ´l´mentaires). Comme l’ensemble des
e ee
chemins ´l´mentaires est fini, min v(ue ) est d´fini et de plus min v(u) ≥ min v(ue ) ((o` min v(u)
ee e u
d´note le minimum des valeurs des chemins). D’autre part, un chemin ´l´mentaire est un chemin,
e ee
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-99-320.jpg)


![102 Chemins de valeur optimale
– Pour montrer les in´galit´s contraires, on consid`re les deux cas possibles :
e e e
1. i ∈ Γ (1). Dans ce cas, λ(i) = +∞ et donc λ(i) ≥ µ(i).
2. i ∈ Γ (1). Dans ce cas, il existe dans G un chemin u = [1,i1 , . . . ,ik ,i], de valeur λ(i).
Puisque les µ(i) sont solution du syst`me, les in´galit´s suivantes sont v´rifi´es:
e e e e e
µ(i1 ) ≤ µ(1) + v(1,i1 )
µ(i2 ) ≤ µ(i1 ) + v(i1 ,i2 )
...
µ(i) ≤ µ(ik ) + v(ik ,i)
En sommant membre ` membre, et comme µ(1) = 0, on obtient:
a
µ(i) ≤ v(1,i1 ) + v(i1 ,i2 ) + . . . + v(ik ,i) = v(u) = λ(i)
Regroupant les deux cas, on obtient :
∀i (1 ≤ i ≤ n) : λ(i) ≥ µ(i) (8.4)
– Des ´quations 8.3 et 8.4 on d´duit :
e e
∀i (1 ≤ i ≤ n) : λ(i) = µ(i)
P
Remarque. Consid´rons le graphe Gmin (1) dont l’ensemble des sommets est l’ensemble des
e
descendants du sommet 1, et l’ensemble des arcs est l’ensemble des couples (pred(i),i) pour tout
i descendant du sommet 1. Formellement :
Gmin (1) = (Γ∗ (1),{(pred(i),i) | i ∈ Γ∗ (1)})
= ({i | λ(i) < +∞},{(i,j) | λ(j) = λ(i) + v(i,j)}
Les caract´risations pr´c´dentes montrent que ce graphe est une arborescence de racine 1.
e e e
Les algorithmes de calcul des chemins minimaux issus de 1 que nous ´tudions ci-apr`s pourront
e e
donc ˆtre vus comme des algorithmes d’exploration de la descendance de 1, avec une strat´gie
e e
de s´lection sp´cifique ` chacun d’eux.
e e a
8.3 Algorithme de FORD : exploration
8.3.1 Principe
On note x0 le sommet initial. Le principe de cet algorithme consiste ` ajuster progressivement
a
les valeurs des attributs λ jusqu’` ce qu’ils v´rifient le syst`me caract´ristique. Pour assurer qu’on
a e e e
obtient bien la solution maximale, on part de valeurs initiales dont on sait a priori qu’elles
majorent les valeurs λ. Pour cela, nous allons tester tous les arcs du graphe selon un ordre de
parcours induit par une exploration en profondeur analogue ` celle r´alis´e pour l’´num´ration
a e e e e
des chemins ´l´mentaires issus de x0 (cf. §6.3).
ee
Un arc (y,z) est test´ lorsque y est sommet de pile et z est le successeur courant de y; en effet,
e
y est alors reconnu comme descendant de x0 , et l’´tat de la pile d´finit le chemin courant de x0
e e
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-102-320.jpg)
![8.3. Algorithme de FORD : exploration 103
` y : (λ(y), pred(y)) ont ´t´ initialis´s ou mis ` jour lorsque y a ´t´ empil´ pour la premi`re fois.
a ee e a ee e e
Quant ` z, plusieurs cas peuvent se pr´senter selon son ´tat relatif ` l’exploration (cf terminologie
a e e a
du chapitre 5) :
1er cas £z est dehors. Il devient alors en attente (et va ˆtre empil´), et (λ(z), pred(z)) sont
e e
initialis´s :
e
λ(z) ← λ(y) + v(y,z);
pred(z) ← y
2eme cas £ z est termin´; cela signifie que z a ´t´ pr´c´demment empil´ ` partir d’un pr´d´cesseur
` e ee e e ea e e
= y puis d´pil´ – apr`s que toute sa descendance ait ´t´ explor´e; les attributs de z ont donc
e e e ee e
d´j` une valeur, mais celle-ci peut ˆtre remise en cause par l’arc (y,z) qui doit donc ˆtre test´:
ea e e e
si λ(y) + v(y,z) < λ(z)
alors λ(z) ←− λ(y) + v(y,z) ; pred(z) ←− y;
z est empil´ car la modification de λ(z) peut remettre en cause
e
les valeurs pr´c´demment attribu´es aux descendants de z, d’o` la
e e e u
n´cessit´ de refaire l’exploration ` partir de z.
e e a
sinoninutile d’empiler z ` nouveau : ses attributs ne sont pas modifi´s
a e
donc ceux de ses descendants non plus.
fsi
3eme cas £ z est en attente (il appartient donc ` la pile.)
` a
x
0
Cela signifie qu’un circuit passant par y
u
1 et z est rencontr´, puisque z est ` la fois
e a
ant´c´dent et successeur de y. Le test de
e e
z mise ` jour des attributs de z permet alors
a
de d´tecter si ce circuit est absorbant; exa-
e
u minons la figure ci-contre :
2
y
Proposition : le circuit u2 · (y,z) est de valeur <0 si et seulement si :
λ(y) + v(y,z) < λ(z)
D´monstration Il existe un chemin u1 = [1 ∗ z], de valeur λ(z). Comme u1 · u2 est le chemin
e
courant de 1 ` y, on a :
a
(1) λ(y) ≤ v(u1 ) + v(u2 ) = λ(z) + v(u2 )
i) £ Supposons v(u2 ) + v(y,z) < 0. D’apr`s (1), on a :
e
λ(y) + v(y,z) ≤ λ(z) + v(u2 ) + v(y,z)
< λ(z) d’apr`s l’hypoth`se.
e e
ii) £ R´ciproquement, supposons λ(y) + v(y,z) < λ(z). L’in´galit´ (1) ne peut pas ˆtre stricte :
e e e e
en effet, si λ(y) < λ(z) + v(u2 ), cela signifie que y a ´t´ visit´ pr´c´demment comme extr´mit´
ee e e e e e
d’un chemin ne passant pas par z; y a alors ´t´ empil´ et sa descendance explor´e. L’arc (y,z)
ee e e
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-103-320.jpg)

![8.3. Algorithme de FORD : exploration 105
FORD : EXPLORATION EN PROFONDEUR
REEL SOMMET::λ ; SOMMET SOMMET::pred ;
ford-profondeur(GRAPHE G, SOMMET x) c’est
local ENS[SOMMET] SOMMET::a visiter: ;
ENUM[dehors, en attente, termin´] SOMMET::etat ;
e
PILE[SOMMET] A; BOOL absorbant ; SOMMET y, z ;
d´but
e
depuis
pourtout y de G.lst som faire y.´tat ← dehors fpourtout ;
e
absorbant ← faux ; A.creer ; A.empiler(x) ;
x.´tat ← en attente ; x.λ ← 0 ; x.a visiter ← G.lst succ(x) ;
e
jusqua A.vide ou absorbant
faire
y ← A.sommetpile ;
si y.a visiter = ∅
alors y.´tat ← termin´ ; A.depiler
e e
sinon
z ← y.a visiter.element ; y.a visiter ← y.a visiter {z} ;
cas z.´tat =
e
dehors −→
z.´tat ← en attente ; z.λ ← y.λ+ G.v(y,z) ; z.pred ← y ;
e
A.empiler(z) ; z.a visiter ← G.lst succ(z)
en attente −→
absorbant ← (z.λ > y.λ + G.v(y,z))
termin´ −→
e
si z.λ > y.λ+ G.v(y,z)
alors z.´tat ← en attente ;
e
z.λ ← y.λ+ G.v(y,z) ; z.pred ← y ;
A.empiler(z) ; z.a visiter ← G.lst succ(z)
fsi
fcas
fsi
fait ;
-- si absorbant alors il y a un circuit absorbant
sinon les sommets ∈ en attente sont inaccessibles
fin
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-105-320.jpg)
![106 Chemins de valeur optimale
8.3.3 Une heuristique d’am´lioration
e
Dans la strat´gie d’exploration en profondeur utilis´e, le choix d’un successeur du sommet
e e
de pile est laiss´ arbitraire. Il est posible de d´finir un crit`re de choix d’un tel successeur, tenant
e e e
compte de la nature du probl`me ` r´soudre, ` savoir la recherche de chemins de valeur minimale
e a e a
sur un graphe dont les arcs sont valu´s. Un tel crit`re doit laisser esp´rer une am´lioration du
e e e e
temps d’ex´cution de l’algorithme, mais sans que le prix ` payer pour sa mise en œuvre ne
e a
devienne prohibitif: ce crit`re ne devra donc prendre en compte que des informations locales,
e
c’est-`-dire relatives ` l’´tat courant du sommet courant. Par contre, l’am´lioration cens´e r´sulter
a a e e e e
de l’application de ce crit`re ne pourra ˆtre ´tablie sˆrement; dans certains cas, il pourrait
e e e u
mˆme en r´sulter une d´t´rioration du comportement, mais en moyenne une am´lioration doit
e e ee e
intervenir.
Un crit`re possible et simple ` mettre en œuvre consiste ` choisir, parmi les successeurs
e a a
possibles du sommet de pile y, un sommet z tel que v(y,z) soit minimum. L’am´lioration attendue
e
r´side dans une diminution du nombre de retours dans la pile, donc de reprise de parcours d´j`
e ea
effectu´s. Le prix ` payer est un tri sur l’ensemble des valeurs des arcs issus de y.
e a
8.4 Algorithme de BELLMANN-KALABA
8.4.1 Principe
Il s’applique ` tout graphe valu´, et permet de d´tecter d’´ventuels circuits absorbants. Nous
a e e e
poserons, par convention :
v(1,1) = 0 et, si | u |= 0,v(u) = 0.
(k)
Pour tout x ∈ X et tout entier k ≥ 1, on notera Cx l’ensemble des chemins de 1 ` x, de
a
(k)
longueur ≤ k. Remarquer que Cx = ∅ si et seulement si tout chemin de 1 ` x, s’il en existe,
a
est de longueur > k.
L’algorithme de Bellmann-Kalaba est fond´ sur le r´sultat suivant :
e e
(k)
Proposition 8.8 On consid`re les valeurs λx d´finies par :
e e
v(1,x) si (1,x) ∈ Γ
(1)
λx = 0 si x = 1
+∞ si (1,x) ∈ Γ
∀k ≥ 2 : λ(k) =
x min [λ(k−1) + v(x,y)]
y
y∈Γ−1 (x)
(k) (k)
Alors λx = minu∈C (k) v(u) (+∞ si Cx = ∅).
x
D´monstration. Par r´currence sur k :
e e
Base : V´rifi´ pour k = 1, par d´finition.
e e e
Induction : Supposons la proposition v´rifi´e pour k − 1 ≥ 1
e e
1er cas : C (k) = ∅.
x
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-106-320.jpg)

![108 Chemins de valeur optimale
8.4.2 Analyse
Invariant 1 ≤ k ≤ n∧
A = ∪k Γ[j] (1)∧
j=1
(k−1)
∀x ∈ A λ anc(x) = valeur minimale des chemins de Cx ∧
(k)
λ(x) = valeur minimale des chemins de Cx ∧
pred(x) = pr´d´cesseur optimal de x sur de tels che-
e e
mins ∧
stab ≡ λ = λ anc
Termin´
e (k = n) ∨ stab
resultat si stab alors (λ, pred)
sinon il y a des circuits absorbants fsi
Progression (* k < n ∧ ¬stab *)
λ anc←λ ; stab← vrai ;
∀x ∈ X : λ(x)← min λ anc(y) + v(y,x) | y ∈ Γ−1 ∩ A ;
pred(x)← valeur de y pour laquelle ce min est
atteint ;
si x ∈ A alors stab←(stab ∧ λ(x) = λ anc(x))
sinon stab← faux ; A←A ∪ {x}
fsi ;
k←k + 1
Valeurs initiales λ(1)←0;
∀x ∈ Γ(1) : λ(x)←v(1,x);
pred(x)←1;
A←{1} ∪ Γ(1);
k←1
8.4.3 Texte de l’algorithme
Il est donn´ page 109.
e
8.4.4 Preuve
Nous ne la d´taillerons pas, la laissant en exercice au lecteur. Les quatre r´sultats suivants
e e
doivent ˆtre montr´s :
e e
Lemme 8.11 Les valeurs initiales satisfont l’invariant.
e ´
D´monstration. Evidente, grˆce ` la convention v(1,1) = 0
a a
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-108-320.jpg)
![8.4. Algorithme de BELLMANN-KALABA 109
ALGORITHME DE BELLMANN-KALABA
REEL SOMMET::λ ;
SOMMET SOMMET::pred ;
REEL SOMMET::λ anc ;
bellmann-kalaba(GRAPHE G, SOMMET x) c’est
local ENS[SOMMET] A, E;
BOOL stab;
ENT k;
SOMMET x, y ;
d´but
e
depuis
k ← 1 ; stab ← faux ; x.λ ← 0 ; A ← {x0 } ; E ← G.lst succ(x) ;
pourtout x de E
x.λ ← G.v(x,x) ; A ← A ∪{x}
fpourtout ;
jusqua stab ou k ≥ n
faire
k ← k+1 ;
pourtout x de G.lst som faire x.λ anc ← x.λ fpourtout ;
stab ← vrai ;
pourtout x de G.lst som faire
E ← G.lst pred(x) ; E ← E ∩ A ;
si E = ∅ alors
(x.λ, x.pred) ← min(y.λ anc + G.v(y,x), E) ;
si x ∈ A
alors stab ← stab et (x.λ =x.λ anc)
sinon stab ← faux ; A ← A ∪{x}
fsi
fsi
fpourtout ;
fait ;
-- si k < n alors Resultat : ← (λ , pred)
-- sinon circuit absorbant d´tect´
e e
fin
(w,y0) ← min (f (y),E) est une primitive, signifiant que
w = min (f (y) | y ∈ E) = f (y0), o` f est une fonction E → R
u
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-109-320.jpg)


![112 Chemins de valeur optimale
Pour montrer la partie ii), consid´rons la suite de sommets
e
x = y0 > y1 > . . . > yν et yν ≥ yν+1 telle que :
(k) (k)
λx
= λy1 + v(y1 ,x)
(k)
λ (k)
= λy2 + v(y1 ,y2 )
y1
.
.
.
(k)
(k)
λν = λν+1 + v(yν+1 ,yν )
yν existe n´cessairement (´ventuellement ν =0), puisque la suite est d´croissante et minor´e par
e e e e
1. Si on somme cette suite d’´galit´s, il vient :
e e
λ(k) = λ(k−1) + v(yν+1 ,yν ) + ... + v(y1 ,x)
x yν+1
(k−1)
D’apr`s l’hypoth`se de r´currence, il existe un chemin u = [1 ∗ yν+1 ] avec v(u ) = λyν+1 . Le
e e e
(k)
chemin u · (yν+1 ,yν , . . . ,y1 ,x) a donc pour valeur λx . P
Corollaire 8.16 Il existe k ≤ n tel que
∀x ∈ X : λ(k) = λ(k−1)
x x
si et seulement si le sous-graphe G0 ne comporte pas de circuit absorbant
La d´monstration est identique ` celle du corollaire 8.9
e a
Nous ne d´crivons pas l’algorithme acc´l´r´ en entier, mais seulement les modifications `
e ee e a
apporter ` l’algorithme pr´c´dent : le tableau λ anc devient inutile ; on le remplace par une
a e e
simple variable r´elle δ. (L’affectation λ anc←λ est donc ` supprimer).
e a
Remarque. Comme pour l’algorithme de Ford, l’algorithme de Bellmann-Kalaba rentre
dans une classe d’algorithmes par ajustements successifs, et donc n’apporte pas de solution
sp´cifique au probl`me 8.1. Par contre, l’algorithme dans sa version non acc´l´r´e permet de
e e ee e
restreindre le calcul aux chemins ayant une longueur maximum donn´e. e
Les deux algorithmes qui vont suivre rentrent dans la classe des algorithmes gloutons, c’est
a
` dire qu’ils calculent le r´sultat d´finitif de chaque sommet, examin´s dans un certain ordre,
e e e
sans jamais revenir en arri`re - c’est ` dire sans jamais remettre en cause les r´sultats partiels
e a e
d´j` acquis. A ce titre, ils peuvent ˆtre adapt´s au probl`me 8.1. Toutefois, ils ne s’appliquent
ea e e e
qu’` des graphes ayant des propri´t´s particuli`res : valeurs positives ou nulles pour le premier,
a ee e
graphes sans circuit pour le second.
8.5 Cas des arcs de valeur positive ou nulle : algorithme de
DIJKSTRA
G = (X,Γ,v) est un graphe valu´, avec ∀γ ∈ Γ : v(γ) ≥ 0 si bien que G ne poss`de aucun
e e
circuit absorbant.
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-112-320.jpg)
![8.5. Cas des arcs de valeur positive ou nulle : algorithme de DIJKSTRA 113
8.5.1 Principe de l’algorithme de DIJKSTRA
L’ algorithme de Dijkstra est une strat´gie particuli`re de l’algorithme d’exploration pour
e e
le calcul de la descendance du sommet 1 vu au 6.2. Il est donc plus simple que l’algorithme
d’exploration de Ford du §8.3, bas´ sur l’exploration de tous les chemins ´l´mentaires issus de
e ee
1 : ceci est du ` l’hypoth`se plus restrictive sur les valeurs des arcs.
a e
Par rapport au sch´ma g´n´ral du §6.2, les pr´cisions et modifications suivantes sont ap-
e e e e
port´es :
e
– Lorsqu’un sommet z devient en attente, ses attributs sont initialis´s :
e
λ(z)←λ(y) + v(y,z); pred(z)←y, o` y est son p`re dans l’arborescence d’exploration.
u e
– Lorsqu’un sommet z est termin´, ses attributs (λ(z), pred(z)) sont d´finitifs (leur valeur
e e
est correcte)
– La s´lection d’un sommet d’´tat en attente se fait selon le crit`re suivant : on choisit le som-
e e e
met y d’´tat en attente dont l’attribut λ(y) est minimum. Le sommet s´lectionn´ devient
e e e
alors termin´ et, pour tout z ∈ Γ(y) :
e
– si z est dehors, il devient en attente et ses attributs sont initialis´s
e
– si z est en attente ses attributs sont r´´valu´s de la mani`re habituelle :
ee e e
si λ(y) + v(y,z) < λ(z)
alors λ(z)←λ(y) + v(y,z); pred(z)←y
fsi
– si z est termin´, il est ignor´.
e e
Le fait que les attributs des sommets puissent atteindre leur valeur finale avant la fin de
l’algorithme, et que l’on sache ` quel moment de l’ex´cution ce fait se produit, indique que cet
a e
algorithme rentre dans la classe des algorithmes gloutons.
Remarque. Au §6.2 nous avions mis en ´vidence les strat´gies en largeur d’abord et en pro-
e e
fondeur d’abord. La strat´gie utilis´ ici peut ˆtre qualifi´e, elle, de meilleur d’abord (best-first
e e e e
search). Relativement au probl`me trait´, cette strat´gie est informante, c’est-`-dire qu’elle tient
e e e a
compte des informations d´j` obtenues sur les valeurs de chemins (informations s´mantiques),
ea e
alors que les deux premi`res sont aveugles, c’est-`-dire purement syntaxiques.
e a
La gestion de l’ensemble des sommets d’´tat en attente, not´ A, va ˆtre effectu´e selon
e e e e
la structure de donn´es appel´e tas, qui est une structure ordonn´e dans laquelle l’acc`s ` un
e e e e a
´l´ment de valeur minimum parmi tous les ´l´ments de l’ensemble se fait en temps constant, c’est-
ee ee
a
`-dire ind´pendant du nombre d’´l´ments contenus dans cette structure. De mani`re analogue
e ee e
aux files (§6.3.1) et aux piles (§6.3.2), on consid`re le type tas comme un type de donn´es
e e
abstrait. La d´claration
e
TAS[E ORD] t d´clare un tas d’objets de type E ORD, o` E ORD est un type dont les valeurs sont
e u
ordonn´es.
e
Les op´rations sur les tas sont alors :
e
creer cr´e un nouveau tas vide
e
BOOL tasvide pr´dicat ` valeur vrai si et seulement si le tas est vide
e a
mettre en tas(E ORD v) ajout dans le tas de l’´l´ment de valeur v
ee
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-113-320.jpg)


![116 Chemins de valeur optimale
ALGORITHME DE DIJKSTRA
REEL SOMMET::λ ; SOMMET SOMMET::pred ;
dijkstra(GRAPHE G, SOMMET x) c’est
local ENUM[dehors,en attente,termin´] SOMMET::´tat ;
e e
TAS[DOUBLET[SOMMET, REEL]] A;
ENS[SOMMET] MOD -- sommets modifiables
SOMMET z, nouv ;
REEL w;
d´but
e
depuis
pourtout x de G.lst som faire x.´tat ← dehors fpourtout ;
e
A.creer ;
x.´tat ← en attente ; x.λ ← 0 ;
e
A.mettre en tas((x,0)) ;
jusqua A.vide
faire
(nouv,w) ← A.mintas ; -- w=nouv.λ
A.^ter de tas;
o
nouv.´tat ← termin´ ;MOD ← G.lst succ(nouv) ;
e e
-- mise ` jour des marques des sommets modifiables
a
pourtout z de MOD
cas z.´tat = dehors −→ z.´tat ← en attente ;
e e
z.λ ← w + G.v(nouv, z) ;
z.pred ← nouv ;
A.mettre en tas((z, z.λ))
z.´tat = en attente −→ si w + G.v(nouv, z) < z.λ
e
alors
A.reorg((z, z.λ),(z, w + G.v(nouv, z)));
z.λ ← w + G.v(nouv, z) ;
z.pred ← nouv
fsi
z.´tat = termin´ −→ rien
e e
fcas
fpourtout
fait
-- les sommets d’´tat dehors sont inaccessibles
e
fin
le sommet nouv passe de l’´tat en attente ` l’´tat termin´; il est ˆt´ de A, ajout´ ` T et il
e a e e oe e a
est descendant de 1. D’autre part, les nouveaux ´l´ments de A sont successeurs de nouv, donc
ee
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-116-320.jpg)
![8.5. Cas des arcs de valeur positive ou nulle : algorithme de DIJKSTRA 117
descendants de 1.
Pour I4 et I5, il faut montrer :
1. le sommet nouv v´rifie I4
e
2. les sommets z ∈ A, dont les attributs sont initialis´s ou modifi´s, v´rifient I5
e e e
£ Maintien de I4 : ici, T d´signe la valeur de l’ensemble des sommets d’´tat termin´ au d´but
e e e e
du pas d’it´ration (avant l’adjonction de nouv).
e
Soit u un chemin quelconque de 1 ` a
nouv. Comme 1 ∈ T et nouv ∈ T ,
x
0
ce chemin ”sort” de T : soit z le der-
nouv nier sommet de u, faisant partie de
T , et z son successeur sur u, qui
appartient donc ` A par construc-
a
z z'
M tion (´ventuellement, z = nouv). Le
e
chemin u se d´compose en :
e
u = [1 ∗ z] · (z,z ) · [z ∗ nouv],
et donc :
v(u) = v[1 ∗ z] + v(z,z ) + v[z ∗ nouv]
≥ v[1 ∗ z] + v(z,z ) (valeurs des arcs ≥ 0)
≥ λ(z) + v(z,z ) (z ∈ T ) et I4
≥ λ(z ) (z ∈ Γ−1 (z ) ∩ T et I5)
≥ λ(nouv) (crit`re de s´lection de nouv)
e e
λ(nouv) minore donc la valeur des chemins de 1 ` nouv.
a
D’autre part, soit y = pred(nouv). Par construction :
λ(nouv) = λ(y) + v(y,nouv)
Comme y ∈ T , il existe un chemin [1 ∗ y], de valeur λ(y). Le chemin [1 ∗ y].(y,nouv) a donc pour
valeur λ(nouv), ce qui montre le point 1 (maintien de I4).
£ Maintien de I5 : Soit x ∈ Γ(nouv).
– Si x est dans l’´tat dehors, alors Γ−1 (x) ∩ T = {nouv}, sans quoi x serait d´j` dans A au
e ea
d´but de l’´tape. Par construction, les attributs de x v´rifient bien I5
e e e
– Si x est dans l’´tat en attente, alors nouv est ajout´ ` Γ−1 (x) ∩ T , et le test sur λ(x)
e e a
montre que les nouveaux attributs de x v´rifient toujours I5
e
P
Proposition 8.19 (Correction partielle). Si l’algorithme s’arrˆte, on a
e
` l’arrˆt :
a e
∀x ∈ Γ∗ (1)), les valeurs (λ(x), pred(x)) constituent les attributs mini-
maux de x
D´monstration. Il suffit de montrer que, lorsque l’algorithme est termin´, on a : T = Γ∗ (1); le
e e
r´sultat d´coule alors de I4.
e e
D’apr`s I1, on a T ⊆ Γ∗ (1)
e
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-117-320.jpg)


![120 Chemins de valeur optimale
Lemme 8.22 La progression maintient l’invariant.
D´monstration Notons H ,M ,E les valeurs au d´but de l’´tape. Par hypoth`se, l’invariant
e e e e
est v´rifi´ pour ces valeurs. Soit H, M, E les valeurs ` la fin de l’´tape, et x le sommet s´lectionn´
e e a e e e
durant l’´tape.
e
– H = H priv´ de x, donc H est un sous-graphe de G.
e
– M = M ∪ {x} donc M est l’ensemble des sommets qui ne sont pas dans H.
– E = ensemble des points d’entr´e de H, par construction.
e
– ∀y ∈ M : (λ(y), pred(y)) = attributs minimaux de y. Il reste donc ` montrer quea
(λ(x), pred(x)) = attributs minimaux de x.
On peut ´crire :
e
Cx = Cy,x
y∈Γ−1 (x)
o` Cy,x est l’ensemble de chemins de 1 ` x dont l’avant-dernier sommet est y. On a donc, par
u a
associativit´ du minimum :
e
min v(u) = min ( min v(u))
u∈Cx y∈Γ−1 (x) u∈Cy,x
= min ( min (v[1 y] + v(y,x)))
y∈Γ−1 (x) u∈Cy,x
= min ( min (v(u ) + v(y,x)))
y∈Γ−1 (x) u ∈Cy
= min (v(y,x) + min v(u )) et, comme y ∈ M :
y∈Γ−1 (x) u ∈Cy
= min (v(y,x) + λ(y))
y∈Γ−1 (x)
= λ(x)
De plus, λ(x) = v(y,x) + λ(y), avec y = pred(x). Donc pred(x) est bien le pr´d´cesseur de x
e e
sur un chemin de 1 ` x, de valeur λ(x). Enfin, par hypoth`se sur G, tout chemin est ´l´mentaire.
a e ee
Donc, (λ(x), pred(x)) satisfont la d´finition des attributs minimaux de x.
e P
Proposition 8.23 (Correction partielle) A l’arrˆt de l’algorithme :
e
∀x ∈ X les attributs (λ(x), pred(x)) sont minimaux.
D´monstration A l’arrˆt, on a H.vide donc M = G.ens som. Le r´sultat d´coule de l’invariant.
e e e e
P
Proposition 8.24 (Terminaison) L’algorithme s’arrˆte au bout d’un
e
nombre fini d’´tapes.
e
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-120-320.jpg)
![8.6. Cas des graphes sans circuit : algorithme ORDINAL 121
D´monstration A la fin de chaque ´tape, on a ¬H.vide ⇒ E = ∅ car le graphe est sans
e e
circuit (cf. proposition 7.1). Donc, dans chaque ´tape, la s´lection d’un sommet x est possible.
e e
Ce sommet ´tant ˆt´ de M lors de l’´tape, la fonction card(X M ), minor´e par 0, d´croˆ
e oe e e e ıt
strictement d’une unit´ ` chaque pas d’it´ration.
ea e P
8.6.4 Texte de l’algorithme
Il est donn´ page 121
e
ALGORITHME ORDINAL RACINE
REEL SOMMET::λ ; SOMMET SOMMET::pred ;
ordinal racine(GRAPHE G; SOMMET x) c’est
local ENS[SOMMET] M; -- sommets marqu´s e
ENS[SOMMET] E; -- points d’entr´e courants
e
GRAPHE H ; -- graphe courant
SOMMET x, y;
d´but
e
depuis
x.λ ← 0 ; H ← G; H.otersom(x) ;
M ← {x0 } ;
E ← H.points entree
jusqua H.vide ou sinon E = ∅
faire
-- selection d’un sommet de E
x ← E.element ;
(x.λ, x.pred) ← min(y.λ+G.v(y,x), G.lst pred(x)) ;
M ← M ∪ {x} ;
H.oter sommet(x) ;
E ← H.points entree
fait ;
-- si E=∅ alors G a des circuits : algorithme inapplicable
fin
min a la mˆme signification que dans l’algorithme de
e
Bellmann-Kalaba (cf. page 109).
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-121-320.jpg)

![8.6. Cas des graphes sans circuit : algorithme ORDINAL 123
8.6.6.3 Nouvelle version de l’algorithme
On peut mettre en œuvre l’une ou l’autre de ces deux adaptations. On donne le texte de
l’algorithme prenant en compte les deux ` la fois.
a
ALGORITHME ORDINAL RACINE (deuxi`me version)
e
REEL SOMMET::λ ; SOMMET SOMMET::pred ;
ordinal racine(GRAPHE G, SOMMET x) c’est
local ENS[SOMMET] D; -- sommets dehors
ENS[SOMMET] E; -- points d’entr´e courants
e
GRAPHE H ; -- graphe courant
ENT SOMMET ::nb ;
SOMMET x, y;
d´but
e
depuis
x.λ ← 0 ; H ← G;
D ← G.ens som {x0 } ;
E ← {x0 }
jusqua H.vide ou sinon E = ∅
faire
-- selection d’un sommet de E
x ← E.element ;
pour tout y de H.lst succ(x)
si y ∈ D
alors y.nb ← H.nb pred(y) ;
y.λ ← x.λ+H.v(x,y) ;
y.pred ← x
sinon
si x.λ+H.v(x,y) < y.λ
alors y.λ ← x.λ+H.v(x,y) ;
y.pred ← x
fsi ;
y.nb ← y.nb - 1 ;
si y.nb=0 alors E ← E ∪ {y} fsi
fpourtout ;
E ← E {x}
fait ;
-- si E=∅ alors G a des circuits : algorithme inapplicable
fin
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-123-320.jpg)
![124 Chemins de valeur optimale
8.6.6.4 G´n´ralisation au cas o` 1 n’est pas n´cessairement point d’entr´e
e e u e e
Il faut alors tenir compte des sommets x ∈ Γ∗ (1), pour lesquels λ(x) ne doit pas ˆtre d´fini.
e e
L’algorithme doit alors mettre en ´vidence, parmi les sommets ”marqu´s”, ceux qui sont des-
e e
cendants de 1. Le calcul des attributs (λ(x), pred(x)) se fera en ne tenant compte que des
descendants de 1, g´r´ comme dans les algorithmes d’exploration.
ee
Nous laisserons au lecteur le soin d’´crire le texte de l’algortihme, d’´tablir la preuve et
e e
d’´tudier la complexit´, de mani`re analogue ` l’algorithme Ordinal-racine.
e e e a
8.7 Valeurs optimales de tout sommet ` tout sommet
a
8.7.1 De la fermeture transitive aux valeurs optimales
Le but de ce probl`me est de calculer les nombres
e
λij = valeurs minimales des chemins de i ` j pour tous couples (i,j) (si j ∈ Γ+ (i), on peut
a
poser, arbitrairement, λij = +∞).
Si on revient au probl`me de la fermeture transitive, il s’agissait alors de calculer les bool´ens :
e e
bij = (j ∈ Γ+ (i))
Il est clair que ces bool´ens v´rifient :
e e
(2) ∀i ∈ X, ∀j ∈ X : bij = [bik ∧ v(k,j)]
k∈Γ−1 (j)
o` v(k,j) est la valeur d’existence (bool´enne) de l’arc(k,j).
u e
La comparaison de (1) et (2) montre qu’il y a une analogie entre les deux probl`mes, aux
e
transformations suivantes pr`s :
e
valeur des arcs et des chemins : r´el ∪{+∞}
e booleen
op´rations sur les arcs :
e +
op´rations sur les chemins :
e min
valeurs remarquables : 0 (neutre de +) vrai (neutre de )
+∞ (neutre de min, faux (neutre de ,
absorbant de +) absorbant de
Ceci sugg`re l’id´e suivante : de tout algorithme d’existence de chemin on peut d´duire un
e e e
algorithme de chemin de valeur minimale.
En particulier, les algorithmes de calcul de la fermeture transitive ont leur ´quivalent.
e
8.7.2 Transformation de l’algorithme des puissances
Pour l’algorithme des puissances, il suffit de remplacer :
– L’op´ration ◦ par +, dont nous donnons l’algorithme ci-dessous page 125
e
– L’op´ration par l’op´ration min telle que :
e e
G3 = (X,Γ3,V 3) = min(G1,G2) est d´fini par :
e
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-124-320.jpg)
![8.7. Valeurs optimales de tout sommet ` tout sommet
a 125
V 3(i,j) = min[V 1(i,j),V 2(i,j)]
(par convention, (i,j) ∈ Γ ⇔ v(i,j) < +∞)
ALGORITHME G1 + G2
GRAPHE composer-general(GRAPHE G1, G2) c’est
-- pr´ : G1.lst som = G2.lst som; G1 et G2 ont mˆme type de valeurs d’arcs
e e
local SOMMET x, y, z ; ENS[SOMMET] X
REEL w1, w2, w3 ;
d´but
e
Result.creer ; X ← G1.lst som ; -- ou G2.lst som
pourtout x de X
pourtout y de X
w3 ← Result.v(x,y) ;
pourtout z de X
w1 ← G1.v(x,z) ;
w2 ← G2.v(z,y) ;
si w1 = nil et w2 = nil
alors si w3 = nil
alors w3 ← min(w1 + w2, w3)
sinon w3 ← w1 + w2
fsi
fsi
fpourtout ;
si w3 = nil alors Result.modif val(x,y,w3) fsi
fpourtout
fpourtout
fin
La validit´ de l’algorithme des puissances (adapt´ du §5.3) d´coule des propri´t´s alg´briques
e e e ee e
suivantes, faciles ` v´rifier :
a e
min est associative, commutative
+ est associative, poss`de l’´l´ment neutre D = (X,∆) valu´ par 0, et est distributive par
e ee e
rapport ` min.
a
Enfin, ∀k : la valeur v (k) de tout arc (x,y) ∈ Γ(k) est ´gale ` la valeur minimale des chemins
e a
reliant x ` y dans G, de longueur k.
a
Toutefois, la possibilit´ d’existence de circuits absorbants oblige ` faire les v´rifications
e a e
suppl´mentaires suivantes pour l’algorithme des puissances (§5.3) : il faut rajouter la condi-
e
tion d’arrˆt k = n qui, si elle est obtenue, est ´quivalente ` l’existence d’un circuit absorbant ;
e e a
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-125-320.jpg)
![126 Chemins de valeur optimale
en effet, on a alors :
min(G, . . . ,G(n) ) = min(G, . . . ,G(n−1) )
ce qui prouve qu’il existe un chemin de longueur n (circuit hamiltonien ou chemin non ´l´mentaire),
ee
de valeur v < aux valeurs de tous les chemins ´l´mentaires.
ee
8.7.3 Transformation de l’algorithme de Roy-Warshall
En nous inspirant des mˆmes principes, nous pouvons adapter l’algorithme de Roy-Warshall (ap-
e
pel´ Warshall-Floyd); nous donnons ci- dessous (page 127) la version avec routage proc´dur´,
e e e
suivie des proc´dures de routage.
e
Nous ne red´montrerons pas en d´tail cet algorithme, la d´monstration ´tant en tous points
e e e e
analogue ` celle de l’algorithme de roy- Warshall avec routage ; on a les 3 lemmes suivants :
a
1. A l’issue de l’algorithme,
∀z ∈ X,∀y ∈ X : y.R[z] = nil si et seulement si (y,z) ∈ Γ+
2. Si G n’a pas de circuit absorbant alors, pour tout couple (y,z) ∈ Γ+ on a, ` l’issue de
a
l’algorithme :
y.R[z] est successeur de y sur un chemin de valeur minimale de y ` z.
a
3. Si G n’a pas de circuit absorbant alors, pour tout couple (y,z) ∈ Γ+ , tout chemin de valeur
minimale de y ` z est ´l´mentaire
a ee
On d´duit de ces trois lemmes que : si G n’a pas de circuit absorbant, les tables de routage R
e
permettent d’obtenir les trac´s de chemins de valeur minimale entre tout couple de sommets.
e
Cas o` G a des circuits absorbants
u
Cette situation peut ˆtre d´tect´e ` l’examen du graphe Result ` l’issue de l’algorithme. En
e e e a a
effet, l’existence d’un circuit absorbant passant par un sommet x se manifestera par la propri´t´ :
ee
Result.v(x,x) < 0
Si tel est le cas, les valeurs des arcs de Result ne peuvent ˆtre interpr´t´es comme des valeurs
e ee
minima, puisque les valeurs des chemins ne sont pas n´cessairement born´es inf´rieurement.
e e e
Toutefois, les fonctions de routage permettent d’obtenir le trac´ de circuits absorbants, et donc
e
d’en ´liminer. En effet, soit x ∈ X tel que Result.v(x,x) < 0. La suite d´finie par
e e
x1 = x.R[x],x2 = x1 .R[x], . . . ,xj = xj−1 .R[x]
comporte une r´p´tition, laquelle correspond ` un circuit absorbant.
e e a
Exemple :
0
1 -2
1 2 3
-2
Sur une mise en œuvre matricielle (y.R[z] = R[y,z]) on obtient, par applications successive
de θ1 , θ2 , θ3 (` gauche : matrice des valeurs, ` droite matrice R) :
a a
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-126-320.jpg)
![8.7. Valeurs optimales de tout sommet ` tout sommet
a 127
Algorithme WARSHALL-FLOYD
TABLE[SOMMET,SOMMET] SOMMET::R ;
GRAPHE warshall floyd(GRAPHE G) c’est
local SOMMET x, y, z ; ENS[SOMMET] X ;
REEL vy, vz, w ;
d´but
e
Result ← G ; X ← G.lst som ;
initroutage ;
pourtout x de X
pourtout y de X
vy ← Result.v(y,x) ;
si vy = nil alors
pourtout z de X
vz ← Result.v(x,z) ;
si vz = nil alors
w ← Result.v(y,z) ;
si w = nil
alors si vy + vz < w
alors w ← vy + vz ;
maj routage(y,z,x)
fsi
sinon w ← vy + vz ; maj routage(y,z,x)
fsi ;
Result.modif val(y,z,w)
fsi
fpourtout
fsi
fpourtout
fpourtout
fin
avec :
nil si (y,z) ∈ Γ
initroutage : ∀z ∈ X, ∀y ∈ X : y.R[z]←
z si (y,z) ∈ Γ
majroutage(y,z,x) : y.R[z]←y.R[x]
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-127-320.jpg)
![128 Chemins de valeur optimale
1 2 3 1 2 3
1 1 1 2
2 -2 2 3
3 0 -2 3 1 2
θ1 ↓
1 2 3 1 2 3
1 1 1 2
2 -2 2 3
3 0 -2 3 1 2
θ2 ↓
1 2 3 1 2 3
1 1 -1 1 2 2
2 -2 2 3
3 0 -2 -4 3 1 2 2
θ3 ↓
1 2 3 1 2 3
1 -1 -3 -5 1 2 2 2
2 -2 -4 -6 2 3 3 3
3 -4 -6 -8 3 2 2 2
d’o` les suites (` partir de 1, 2 et enfin 3) :
u a
1, R[1,1]=2, R[2,1]=3, R[3,1]=2 −→ circuit 2,3,2
2, R[2,2]=3, R[3,2]=2 −→ circuit 2,3,2
3, R[3,3]=2, R[2,3]=3 −→ circuit 3,2,3
Le circuit absorbant 2,3,2 (valeur -4) est d´tect´, mais pas le circuit 1,2,3,1 (valeur -1).
e e
8.8 Alg`bres de chemins : transformations d’algorithmes
e
Au paragraphe pr´c´dent, nous avons mis en ´vidence la possibilit´ de d´duction d’un algo-
e e e e e
rithme de chemin de valeur minimale ` partir d’un algorithme d’existence de chemin, grˆce ` la
a a a
transformation :
({vrai,faux}, ∨ ,∧) −→ (R ∪ {+∞}, min ,+)
On peut d´gager une structure abstraite, appel´e dio¨ ou encore semi-anneau, ` partir
e e ıde a
de laquelle d’autres transformations pourront ˆtre d´duites.
e e
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-128-320.jpg)

![130 Chemins de valeur optimale
Dans la structure de dio¨ıde, la notion de circuit absorbant se g´n´ralise comme suit : un
e e
circuit est dit absorbant si sa valeur v v´rifie :
e
v⊕e=e
En fonction du choix du dio¨ (S, ⊕ ,⊗) on peut interpr´ter concr`tement la valeur (dans
ıde e e
S) v(x,y) et la valeur (dans S) des expressions :
∀x ∈ X,∀y ∈ X : λ(x,y) = v(u) = v(u)
{u∈X ∗ |u=[x∗y]} {u∈X ∗ |u=[x∗y]∧v(u)=α}
o`, si u = (x1 , . . . ,xp ), on a pos´
u e
v(u) = v(xj ,xj+1 )
j=1,...,p−1
Exemples
1) Existence d’au moins un chemin
S ≡ {faux,vrai}; ⊕ ≡ ∨; ⊗ ≡ ∧; α = faux; e = vrai
v(x,y) = si(x,y) ∈ Γ alors vrai sinon faux;
∀s ∈ S,s ∨ vrai = vrai donc il n’y a pas de circuit absorbant ;
λ(x,y) = vrai si et seulement si il existe un chemin de x ` y dans G.
a
2) Chemin de valeur minimale
S = R ∪ {+∞}; ⊕ = min; ⊗ = +; α = +∞; e = 0;
v(x,y) = si(x,y) ∈ Γ alors valeur num´rique de l’arc
e
sinon + ∞
Un circuit de valeur v telle que min(v,0) = 0 (c’est ` dire v < 0) est absorbant.
a
λ(x,y) = valeur minimale des chemins de x ` y (s’il n’y a pas de circuit
a
absorbant)
3) chemin de valeur maximale
S = R ∪ {−∞}; ⊕ = max; ⊗ = +; α = −∞; e = 0;
v(x,y) = si (x,y) ∈ Γ alors valeur num´rique de l’arc
e
sinon − ∞
Un circuit de valeur v telle que max(v,0) = 0 (c’est ` dire v > 0) est absorbant.
a
λ(x,y) = valeur maximale des chemins de x ` y (s’il n’y a pas de
a
circuit absorbant).
4) Chemin de fiabilit´ maximale
e
S = [0,1]; ⊕ = max; ⊗ = ×; α = 0; e = 1;
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-130-320.jpg)
![8.8. Alg`bres de chemins : transformations d’algorithmes
e 131
v(x,y) = si (x,y) ∈ Γ alors fiabilit´ de l’arc
e
sinon 0
Toute valeur p ∈ S v´rifie max(p,1) = 1 donc il n’y a pas de circuit absorbant.
e
λ(x,y) = fiabilit´ maximale des chemins de x ` y.
e a
5) Chemin de capacit´ maximale
e
S = R+ ∪ {+∞}; ⊕ = max; ⊗ = min; α = 0; e = +∞;
v(x,y) = si (x,y) ∈ Γ alors capacit´ de l’arc
e
sinon 0
Toute valeur c ∈ S v´rifie max(c, + ∞) = +∞ donc il n’y a pas de circuit absorbant.
e
λ(x,y) = capacit´ maximale des chemins de x ` y.
e a
6) Chemin de fiabilit´ minimale
e
S = [0,1] ∪ {α}(α ∈ [0,1]);
⊕ = min sur [0, 1], prolong´e par ∀x ∈ S : x ⊕ α = x;
e
⊗ = × sur [0, 1], prolong´e par ∀x ∈ S : x ⊗ α = α; e = 1;
e
v(x,y) = si (x,y) ∈ Γ alors fiabilit´ de l’arc
e
sinon α
Toute valeur p ∈ S,p = 1,p = α v´rifie p ⊕ e = min(p,1) = p donc tout circuit de fiabilit´ <
e e
1 est absorbant.
λ(x,y) = fiabilit´ minimale des chemins de x ` y (s’il n’y a pas de
e a
circuit absorbant).
7) Chemin de capacit´ minimale
e
S = R+ ∪ {+∞} ∪ {α}(α ∈ R+ ∪ {+∞});
⊕ = min sur R+ ∪ {+∞}, prolong´e par ∀x ∈ S : x ⊕ α = x;
e
⊗ = min sur R+ ∪ {+∞}, prolong´e par∀x ∈ S : x ⊗ α = α;
e
e = +∞;
v(x,y) = si (x,y) ∈ Γ alors capacit´ de l’arc
e
sinon α
Toute valeur p ∈ S,p = +∞,p = α, v´rifie p ⊕ e = min(p, + ∞) = p donc tout circuit de
e
capacit´ < ∞ est absorbant. (toutefois, p
e 2 ⊕ p ⊕ e = p ⊕ e, o` p2 = p ⊗ p, donc un circuit n’est
u
absorbant ”qu’une fois”).
λ(x,y) = capacit´ minimale des chemins de x ` y (s’il n’y a pas de
e a
circuit absorbant).
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-131-320.jpg)
![132 Chemins de valeur optimale
8) D´nombrement des chemins
e
S = N; ⊕ = +; ⊗ = ×; α = 0; e = 1
v(x,y) = si (x,y) ∈ Γ alors 1
sinon 0
Toute valeur n ∈ N v´rifie n + 1 = 1 donc tout circuit est absorbant.
e
λ(x,y) = nombre de chemins distincts de x ` y (s’il n’y a pas de circuit).
a
´
9) Enum´ration des chemins ´l´mentaires (exemple difficile) :
e ee
+
Soit X l’ensemble de toutes les suites sans r´p´tition d’´l´ments de X, ayant au moins un
e e ee
´l´ment. Notons n = |X|. S est alors l’ensemble constitu´ des n(n − 1) ´l´ments sx,y , x ∈ X, y ∈
ee e ee
+
X, x = y, o` sx,y est un ensemble d’´l´ments de X de la forme [x ∗ y], des n ´l´ments sx = {[x]}
u ee ee
(x ∈ X) et de l’´l´ment e = x∈X sx (identifi´ ` X). On a donc |S| = n2 + 1. Notons qu’on peut
ee ea
avoir sx,y = ∅ pour certains couples (x,y), x = y. En outre,
⊕ = ∪; ⊗ = multiplication latine ; α = ∅
La multiplication latine est d´finie comme suit :
e
– ∀s ∈ S : s ⊗ α = α ⊗ s = α (α = ∅ est donc l’´l´ment absorbant de S).
ee
– ∀x, ∀y, ∀z, ∀t, z = t : sx,z ⊗ st,y = α.
– ∀x, ∀z : sx,z ⊗ sz,x = α
– ∀x, ∀y ,∀z , y = z : sx,y ⊗ sz = α
– ∀x, ∀y ,∀z , x = z : sz ⊗ sx,y = α
– ∀x, ∀y : sx ⊗ sx,y = sx,y
– ∀x, ∀y : sx,y ⊗ sy = sx,y
+
– ∀x, ∀y, ∀z , x = y : sx,z ⊗ sz,y = {u ∈ X |u = [x ∗ z ∗ y],[x ∗ z] ∈ sx,z ,[z ∗ y] ∈ sz,y
Exemple :
si s1,4 = {[1,4],[1,2,4]} et s4,5 = {[4,5],[4,2,5],[4,3,5]} on a :
s1,4 ⊗ s4,5 = {[1,4,5],[1,4,2,5],[1,4,3,5],[1,2,4,5],[1,2,4,3,5]}.
Il est facile de v´rifier que l’´l´ment neutre de ⊗ est e.
e ee
La valuation du graphe est alors :
v(x,y) = si(x,y) ∈ Γ alors {[xy]}
sinon ∅
Par ailleurs, d’apr`s la d´finition de ⊗, la valeur de tout circuit est ´gale ` α, donc v´rifie
e e e a e
α ∪ e = e. Il n’y a donc pas de circuit absorbant.
Enfin,
λ(x,y) = ensemble des chemins ´l´mentaires de x ` y
ee a
Le lecteur int´ress´ trouvera, dans ([GM79], chapitre 3) d’autres exemples et d’int´ressants
e e e
d´veloppements sur les alg`bres de chemin.
e e
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-132-320.jpg)
![8.8. Alg`bres de chemins : transformations d’algorithmes
e 133
Pour conclure, on peut se poser la question de savoir quels sont les algorithmes de chemine-
ment optimal qui peuvent ˆtre transform´s, sur la base de la structure de dio¨ appropri´e, pour
e e ıde e
r´soudre les probl`mes correspondants. Sans entrer dans les d´tails, il s’av`re que les algorithmes
e e e e
n’utilisant pas une proc´dure de s´lection d’un ´l´ment r´alisant un “optimum” peuvent ˆtre
e e ee e e
directement adapt´s, en utilisant les op´rations ⊗ (` la place de +) et ⊕ (` la place de min),
e e a a
ainsi que α (` la place de +∞) et e (` la place de 0). Ainsi, on peut adapter directement Ford,
a a
Bellmann-Kalaba, Ford Ordinal, Puissances, Warshall. Mais ce n’est pas le cas de Dijkstra : en
effet, cet algorithme n´cessite que la loi ⊕ v´rifie : ∀a, ∀b : a ⊕ b ∈ {a,b} (s´lection du “meilleur”
e e e
´l´ment en attente). C’est bien le cas lorsque ⊕ ≡ ou, ou ⊕ ≡ min, ou ⊕ ≡ max (exemples 1 `
ee a
7) mais ce n’est plus le cas pour ⊕ ≡ + ou ⊕ ≡ ∪ (exemples 8 et 9).
De plus, lorsque la loi ⊕ a cette propi´t´, la condition d’application de l’algorithme de
ee
dijkstra s’exprime par :
∀(x,y) ∈ Γ : v(x,y) ⊕ e = e
Elle est donc toujours v´rifi´e pour les exemples 1,4,5 ;
e e
v´rifi´e si v(x,y) ≥ 0 pour l’exemple 2
e e
v(x,y) ≤ 0 pour l’exemple 3
v(x,y) = 1 pour l’exemple 6
v(x,y) = +∞ pour l’exemple 7 (donc irr´alistes pour ces
e
deux exemples)
Pour illustrer la puissance de ces transformations d’algorithme, nous donnons un exemple
d’application de l’algorithme de Bellmann-Kalaba pour l’´num´ration des chemins ´l´mentaires
e e ee
issus du sommet 1 vers chacun des autres sommets (exemple 9). On doit donc calculer : ∀i, i =
1 : λi =ensemble des chemins ´l´mentaires de 1 ` i. La relation de r´currence est ici :
ee a e
λ1 = {[1]}
n
∀k, ∀i : λk =
i λk−1 ⊗ v(j,i)
j
j=1
2 4
1
5
3
La matrice du graphe est :
1 2 3 4 5
1 {[1]} {[1,2]} {[1,3]} α α
2 α α {[2,3]} {[2,4]} α
3 α α α {[3,4]} {[3,5]}
4 α α {[4,3]} α {[4,5]}
5 α α α α α
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-133-320.jpg)
![134 Chemins de valeur optimale
L’ex´cution de l’algorithme donne alors :
e
1 2 3 4 5
{[1]} {[1,2]} {[1,3]} α α
{[1]} {[1,2]} {[1,3]} {[1,2,4] {[1,3,5]}
[1,2,3]} [1,3,4]}
{[1]} {[1,2]} {[1,3]} {[1,2,4] {[1,3,5]
[1,2,3] [1,3,4] [1,2,3,5]
[1,2,4,3]} [1,2,3,4]} [1,2,4,5]
[1,3,4,5]}
{[1]} {[1,2]} {[1,3]} {[1,2,4] {[1,3,5]
[1,2,3] [1,3,4] [1,2,3,5]
[1,2,4,3]} [1,2,3,4]} [1,2,4,5]
[1,3,4,5]
[1,2,4,3,5]
[1,2,3,4,5]}
{[1]} {[1,2]} {[1,3]} {[1,2,4] {[1,3,5]
[1,2,3] [1,3,4] [1,2,3,5]
[1,2,4,3]} [1,2,3,4]} [1,2,4,5]
[1,3,4,5]
[1,2,4,3,5]
[1,2,3,4,5]}
stabilit´ atteinte.
e
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-134-320.jpg)





![9.5. Choix des algorithmes de r´solution
e 141
probl`mes. Nous allons donner quelques indications sur le choix ` effectuer, compte-tenu de
e a
la nature des contraintes.
1er cas. Il n’y a que des contraintes ”au plus tˆt”. Dans ce cas, le graphe obtenu ne doit pas
o
comporter de circuit, sans quoi il y aurait des contraintes incompatibles : il n’y aurait alors pas
d’ordonnancement compatible, puisque tout circuit est un circuit absorbant (les arcs ´tant tous
e
de valeur positive ou nulle).
Comme par ailleurs le sommet x0 est racine, et le sommet xn+1 anti-racine (racine du graphe
transpos´), l’algorithme Ordinal-racine est le mieux adapt´ :
e e
– pour l’ordonnancement au plus tˆt : avec x0 comme sommet de d´part, il suffit de remplacer
o e
min par max dans le calcul d’une marque.
– pour l’ordonnancement au plus tard : avec xn+1 comme sommet de d´part, il suffit de
e
remplacer min par max dans le calcul d’une marque et de permuter les op´rations lst pred
e
et lst succ (puisque l’on cherche les chemins de valeur maximale issus de xn+1 dans le
graphe transpos´).e
Remarque : Si x.α est la valeur maximale des chemins de x ` xn+1 , ces valeurs sont ca-
a
ract´ris´es, d’apr`s le th´or`me 9.4, par :
e e e e e
∀x ∈ X : x.α = max (y.α + v(x,y))
y∈Γ(x)
La date au plus tard de x, relative ` la date finale T , est donn´e par x.λ = T −x.α (th´or`me
a e e e
9.4).
Par cons´quent, ces dates sont caract´ris´es par les relations :
e e e
∀x ∈ X {xn+1 } : x.λ = min y.λ − v(x,y) , xn+1 .λ = T
y∈Γ[x]
On peut donc obtenir directement ces dates en adaptant l’algorithme Ordinal-racine comme
suit :
sommet de d´part : xn+1 ; initialiser xn+1 .λ ` T ;
e a
permuter les op´rations lst pred et lst succ ;
e
marquer un nouveau sommet x par : x.λ ←− min(y.λ − v(x,y),G.lst succ(x))
2`me cas. Les contraintes sont quelconques. Le graphe poss`de alors des circuits, et les arcs ont
e e
des valeurs de signe quelconque. S’il n’y a pas d’incompatibilit´ dans les contraintes, il ne doit
e
pas y avoir de circuit absorbant (valeur > 0). On peut donc envisager l’algorithme d’exploration
en profondeur de Ford (algorithme 8.3.2) ou bien celui de Bellmann-Kalaba (8.4.3). Les
adaptations ` apporter sont les mˆmes que dans le cas pr´c´dent : remplacer min par max.
a e e e
Il existe cependant une technique sp´cifique, qui en g´n´ral s’av`re plus efficace (heuristique).
e e e e
Ceci est bas´ sur la remarque suivante: si on enl`ve du graphe tous les arcs de valeur ≤ 0, le
e e
graphe partiel obtenu doit ˆtre sans circuit (autrement, il y aurait des contraintes incompatibles:
e
voir cas pr´c´dent). On peut toutefois conserver les arcs issus du sommet x0 ainsi que ceux
e e
aboutissant au sommet xn+1 , car ces arcs ne peuvent pas appartenir ` des circuits (x0 est point
a
d’entr´e, et xn+1 est point de sortie). Cette remarque incite ` proc´der en deux phases.
e a e
Premi`re phase
e – Ignorer tous les arcs non issus de x0 ou aboutissant ` xn+1 , qui sont de
a
valeur ≤ 0.
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-141-320.jpg)
![142 Probl`mes d’ordonnancement
e
– Calculer les valeurs λi provisoires, en utilisant l’algorithme Ordinal-racine (si cet
algorithme met en ´vidence des circuits, alors il y a des contraintes incompatibles).
e
Deuxi`me phase : ajustements R´introduire un par un chacun des arcs que l’on a ignor´s
e e e
lors de la premi`re phase. Soit (xi ,xj ,aij ) un tel arc. On teste alors la validit´ de la
e e
contrainte correspondant ` cet arc:
a
– si λj < λi + aij alors λj ←λi + aij .
– Pour tout sommet xj dont l’attribut a ainsi ´t´ augment´, il faut recommencer le
ee e
test sur tous les arcs issus de xj . Ce proc´d´ correspond en fait ` une exploration
e e a
en profondeur de la descendance de xj , mais avec arrˆt de la “descente” ` partir de
e a
sommets non modifi´s. e
L’int´rˆt de cette technique vient de ce que, en g´n´ral, la seconde phase ne provoque que peu
ee e e
de modifications, car les mises ` jour de la descendance des sommets modifi´s s’´teignent assez
a e e
vite.
Des illustrations de cette m´thode seront vues en TD.
e
Pour le calcul d’un ordonnancement au plus tard, tout ce qui pr´c`de reste valable, en
e e
travaillant dans le graphe transpos´ (c’est-`-dire en consid´rant xn+1 comme sommet de d´part,
e a e e
et en permutant les acc`s “successeurs” et pr´d´cesseurs”).
e e e
9.6 ´
Elimination de contraintes redondantes
D´finition 9.7 Une contrainte est dite ”redondante” si elle est im-
e
pliqu´e par un ensemble de contraintes dont elle ne fait pas partie.
e
Cette situation se produit dans le cas suivant : la contrainte tj − ti ≥ ai,j est redondante si et
seulement si il existe, dans G, un chemin (diff´rent de l’arc (i,j)) de xi ` xj , et de valeur v ≥ ai,j .
e a
i ... i
1 k
i j
a
i,j
En effet, le long d’un tel chemin [i,i1 , . . . ,ik ,j] on aura :
ti1 − ti ≥ ai,i1
.
. =⇒ tj − ti ≥ ai,i1 + . . . + aik ,i ≥ ai,j
.
tj − tik ≥ aik ,i
Nous allons ci-dessous examiner dans quels cas certaines contraintes peuvent ˆtre per¸ues
e c
comme redondantes au seul vu des donn´es du probl`me, c’est-`-dire sans le secours d’un algo-
e e a
rithme de cheminement (qui pourrait s’av´rer plus coˆteux que le gain obtenu par la suppression
e u
´ventuelle de contraintes). Il s’agit essentiellement des contraintes implicites, c’est ` dire :
e a
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-142-320.jpg)


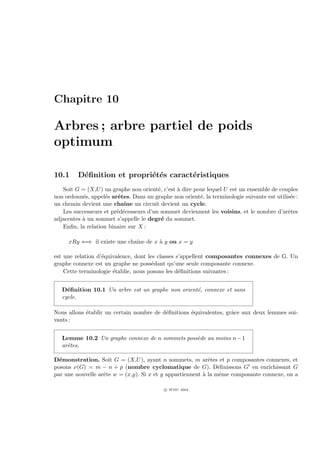




![150 Arbres ; arbre partiel de poids optimum
sont alors fusionn´es en une seule. Enfin, le parcours des arˆtes ordonn´es par valeurs croissantes
e e e
sera g´r´ par les acc`s :
ee e
pp arete : -- pr´ : non hors arete
e
d´livre la premi`re arˆte du parcours ordonn´
e e e e
(arˆte de valeur minimum)
e
pp arete suiv : -- pr´ : non hors arete
e
d´livre la prochaine arˆte du parcours ordonn´
e e e
hors arete : vrai si toutes les arˆtes ont ´t´ visit´es
e ee e
A noter que G.vide ⇒ G.hors arete.
10.3.2 Texte de l’algorithme
Il est donn´ page 150
e
ALGORITHME DE KRUSKAL
ENS[SOMMET] SOMMET::C ; -- x.C = composante connexe de x
ARBRE kruskal(GRAPHESYM G): c’est
local AR^TE arcour;
e
ENT k; -- compteur du nombre d’arˆtes
e
SOMMET x, y;
d´but
e
depuis
pourtout x de G.lst som faire x.C ← {x} fpourtout ;
Result ← creer ; k ← 0 ;
arcour ← G.pp arete ; x ← arcour.ori ; y ← arcour.ext ;
jusqua k ≥ n-1 ou x = nil
faire
si y ∈ x.C alors
Result.ajoutarete(x,y) ;
x.C ← x.C ∪ y.C ; y.C ← x.C ;
k ← k + 1
fsi ;
arcour ← G.pp arete suiv ; x ← arcour.ori ; y ← arcour.ext
fait ;
si k n-1 alors -- erreur : le graphe donne G n’est pas connexe
fin
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-150-320.jpg)


![10.4. Algorithme de PRIM 153
Xk xi uk xk+1
chaîne γ
xa
vk chaîne γ
xb
Fig. 10.3 – passage de Ak ` Ak+1
a
– il est connexe; en effet, soit s et t deux sommets de X; ils sont reli´s dans A par une chaˆ
e ıne
κ. Si cette chaˆ ne contient pas vk , alors c’est une chaˆ de A , par construction; si
ıne ıne
au contraire κ contient vk , on remplace cette derni`re arˆte par la chaˆ [xa , . . . ,xi ] · uk ·
e e ıne
[xk+1 , . . . ,xb ] qui est une chaˆ de A par construction (figure 10.3).
ıne
A est donc un arbre couvrant X, de poids c(A ) = c(A) − c(vk ) + c(uk ) = c(A), et donc de poids
minimal; il contient uk et donc, sa restriction ` Xk+1 est bien Ak+1 . P
a
Corollaire 10.9 A chaque ´tape, l’arbre partiel Ak = (Xk ,Hk ) est un
e
arbre couvrant Xk , de poids minimum.
´
Evident puisque c’est un arbre couvrant Xk , par construction, et c’est la restriction d’un arbre
de poids minimum d’apr`s la proposition pr´c´dente. P
e e e
10.4.2 Mise en œuvre de l’algorithme
La s´lection d’une nouvelle arˆte peut ˆtre effectu´e selon une m´thode tout ` fait analogue
e e e e e a
a
` celle de l’algorithme de Dijkstra (chapitre 8.5). En effet, soit M l’ensemble des sommets d´j`
ea
”couverts” par le sous-arbre partiel. On d´signe par A l’ensemble des sommets ”limitrophes” de
e
M , c’est ` dire :
a
z ∈ A ⇔ z ∈ M et ∃x ∈ M : (x,z) ∈ U
Pour tout z ∈ A, on pose :
δz = min w(x,z)
x∈M
(x,z)∈U
atteint pour un sommet d´not´ pz , puis on s´lectionne y ∈ A tel que
e e e
δy = min δz
z∈A
L’arˆte (py ,y) est alors ajout´e au sous-arbre partiel. A chaque pas d’it´ration, l’ensemble A
e e e
est donc modifi´ de la mani`re suivante : y est ˆt´ de A, et les voisins de y, n’appartenant pas
e e oe
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-153-320.jpg)

![10.4. Algorithme de PRIM 155
ALGORITHME DE PRIM
REEL SOMMET::δ : ; SOMMET SOMMET::p ;
ENUM[dehors,atteint,recouvert] SOMMET::´tat ;
e
ARBRE prim(GRAPHESYM G) c’est
local ENT nbar ; -- nombre d’arˆtes
e
TAS[(SOMMET,REEL)] A; ENS[SOMMET] X, MOD;
SOMMET nouv ; REEL w;
d´but
e
depuis
nbar ← O ;
Result ← creer ; X ← G.lst som ;
pourtout x de X faire x.´tat ← dehors fpourtout ;
e
A ← creer ;
x0 ← X.element ; -- sommet initial quelconque
x0 .´tat ← recouvert ; MOD ← G.lst voisins(x0 ) ;
e
pourtout z de MOD
z.´tat ← atteint ; z.δ ← G.valar^te(x0 ,z) ; z.p ← x0 ;
e e
A.mettre en tas((z,z.δ )) ;
fpourtout
jusqua nbar ≥ n-1
faire
(nouv,w) ← A.mintas ; A.^ter de tas ;
o
nouv.´tat ← recouvert ; MOD ← G.lst voisins(nouv) ;
e
-- mise ` jour des marques des sommets modifiables
a
pourtout z de MOD faire
cas
z.´tat = dehors −→ z.´tat ← atteint ;
e e
z.δ ← G.valar^te(nouv, z) ; z.p ← nouv ;
e
A.mettre en tas((z,z.δ ))
z.´tat = atteint −→ si G.valar^te(nouv, z) z.δ alors
e e
A.reorg((z,z.δ ),(z, G.valar^te(nouv, z)));
e
z.δ ← G.valar^te(nouv, z) ; z.p ← nouv
e
z.´tat = recouvert −→ rien
e
fcas
fpourtout ;
Result.ajoutar^te(nouv,nouv.p) ; nbar ← nbar+1
e
fait
fin
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-155-320.jpg)












![168 Flots dans un r´seau de transport
e
11.4.5 Complexit´
e
La complexit´ de l’algorithme de Ford-Fulkerson n’est pas polynomiale. En effet, le nombre
e
d’´tapes de l’algorithme est major´ par la capacit´ minimale c+ (A) des coupes du r´seau, puis-
e e e e
qu’` chaque ´tape la valeur de ϕ augmente au moins de 1, et que d’apr`s le lemme 11.7 on a
a e e
v(ϕ) ≤ c+ (A). Or cette capacit´ ne peut ˆtre major´e ` partir de la taille du graphe (exprim´e
e e e a e
en fonction de n et m, nombre de sommets et d’arcs). A une mˆme configuration topologique de
e
r´seau peuvent en effet ˆtre attribu´es des capacit´s qui sont des nombres entiers quelconques,
e e e e
donc a priori non born´s.
e
Signalons que des algorithmes de complexit´ polynomiale en fonction du nombre n de som-
e
mets ont ´t´ propos´s: algorithmes de Edmonds-Karp, de Dinic, de Karzanov (ce dernier
ee e
ayant une complexit´ globale en O(n3 )) [Din70, EK72, Kar74, MKM78].
e
11.5 Cas des r´seaux bi-partis : mise en œuvre par tableaux
e
Dans ce paragraphe, nous consid´rons le cas particulier de r´seaux de la forme
e e
G = (X,Y,e,s ; Γe ,Γ,Γs ; c) o`
u
X ∩ Y = ∅, e ∈ X ∪ Y, ,s ∈ X ∪ Y
Γe ⊆ {(e,x),x ∈ X}, Γ ⊆ X × Y, Γs ⊆ {(y,s),y ∈ Y }
Supposons que X = {x1 ,x2 , . . . ,xn } et Y = {y1 ,y2 , . . . ,yp }. Un tel r´seau peut alors ˆtre
e e
repr´sent´ par un tableau C de format (n + 1) × (p + 1), avec
e e
ci,j = c(xi ,yj ), 1 ≤ i ≤ n,1 ≤ j ≤ p
ci,p+1 = c(e,xi ), 1 ≤ i ≤ n
cn+1,j = c(yj ,s), 1 ≤ j ≤ p
cn+1,p+1 non d´fini
e
Exemple y1 y2 y3 y4 y5 y6
x1 20 10 30 0 20 0 30
x2 30 20 0 30 30 0 70
x3 0 20 20 20 0 20 80
x4 0 10 10 10 0 40 60
x5 30 0 20 0 0 20 60
40 20 40 40 30 70
Mise en œuvre de Ford-Fulkerson. Cette mise en œuvre peut ˆtre faite directement `
e a
l’aide d’un tel tableau: la fonction ϕ est repr´sent´e dans un tableau de mˆme format. Pour que
e e e
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-168-320.jpg)



![172 Flots dans un r´seau de transport
e
Texte de la fonction
ENT epsil ;
ENT SOMMET::ε ;
STRING SOMMET::marq ;
local ENS[SOMMET] M
BOOL marquage(GRAPHE G) c’est
d´but
e
M ← ∅ ; epsil ← 0 ;
marquer(e, ’’+’’, +∞) ;
si s ∈ M alors epsil ← s.ε fsi ;
Result ← s ∈ M
fin
marquer(SOMMET x; STRING m; ENT ecart) c’est
precondition x ∈ M
local ENT e
d´but
e
x.marq ← m ;
x.ε ← ecart ;
M ← M ∪ { x };
si x = s
alors
-- marquages avant
pour tout y de G.lst succ(x) faire
si y ∈ M et ϕ(x,y) c(x,y)
alors e ← min(x.ε,c(x,y)-ϕ(x,y)) ;
marquer(y, ’’+x’’ , e)
fsi
fpourtout ;
-- marquages arriere
pour tout z de G.lst pred(x) faire
si z ∈ M et ϕ(z,x) 0
alors e ← min(x.ε,ϕ(z,x)) ;
marquer(z, ’’-x’’ , e)
fsi
fpourtout
fsi
fin
-- ` la sortie de cette proc´dure, soit s est marqu´ (en avant ` partir de x) soit tous les som-
a e e a
mets marquables ` partir de x sont marqu´s.
a e
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-172-320.jpg)

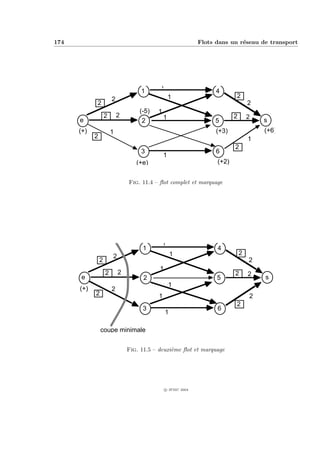








![183
pre non arc termine
renvoie l’arc courant du parcours.
Fonctions ` r´sultat ensemble de sommets
a e
ENS[SOMMET] ens som
G.ens som = ensemble des sommets de G.
ENS[SOMMET] lst succ(SOMMET x)
pre validsom(x)
G.lst succ(x) = Γ(x).
ENS[SOMMET] lst pred(SOMMET x)
pre validsom(x)
G.lst pred(x) = Γ−1 (x).
ENS[SOMMET] points entr´e
e
post x ∈ points entr´e ⇒ lst pred(x)=∅
e
points entr´e = {x ∈ X | Γ−1 (x) = ∅}.
e
ENS[SOMMET] points sortie
post x ∈ points sortie ⇒ lst succ(x)=∅
G.points sortie = {x ∈ X | Γ(x) = ∅}.
Proc´dures de modification (´criture)
e e
Graphes non valu´s
e
ajout sommet(SOMMET x)
post validsom(x)
G.ajout sommet(x) ajoute le sommet x au graphe G.
Sans effet si x est d´j` un sommet.
ea
ajout arc(SOMMET x,y)
post validarc(x,y)
G.ajout arc(x,y) ajoute les sommets x, y et l’arc (x,y) au graphe G.
Sans effet si (x,y) est d´j` un arc.
ea
oter sommet(SOMMET x)
pre non vide
post non validsom(x)
G.oter sommet(x) ˆte le sommet x et tous les arcs adjacents ` x
o a .
oter arc(SOMMET x,y)
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-183-320.jpg)
![184 Les op´rations de la classe GRAPHE et leur s´mantique
e e
pre non vide
post non validarc(x,y)
G.oter arc(x,y) ˆte l’arc (x,y).
o
sous graphe(ENS[SOMMET] E)
pre non vide
post x ∈ E ⇒ non validsom(x).
G.sous graphe(E) ˆte de G tous les sommets appartenant ` E.
o a
Graphes valu´s
e
ajout val(SOMMET x, y; E )
post valid arc(x,y) ; v(x,y) =
ajout val(x, y , ) ajoute l’arc (x,y) de valeur .
Si l’arc existe d´j`, remplace sa valeur
ea
modif val(SOMMET x, y; E )
pre valid arc(x,y)
post v(x,y) =
modif val(x, y, ) modifie la valeur de l’arc.
Invariants
vide ⇒ arcvide
arcvide ⇒ hors arc
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-184-320.jpg)
![Bibliographie
[Ber70] C. Berge. Graphes et Hypergraphes. Dunod, 1970.
[BLW76] N. L. Biggs, E. K. Llyod and R. J. Wilson. Graph Theory 1736-1936. Oxford University
Press, 1976.
[CP84] A. Couvert, R. Pedrono. Techniques de Programmation. Cours C 45, IFSIC, Universit´ e
de Rennes, 1984.
[Cri75] N. Christofides. Graph Theory ; an algorithmic approach. Academic Press, 1975.
[Din70] Dinic, G. A. Algorithm for solution of a problem of maximum flow in a network with
lower estimation. Soviet. Math. Dokl., 11:1277-1280, 1970.
[EK72] Edmonds, J. and Karp, R. M. Theoretical improvements in algorithmic efficiency for
network flow problems. J. ACM 19(2):248-264, 1972.
[GM79] M. Gondran, M. Minoux. Graphes et Algorithmes. Eyrolles, 1979.
[HP82] J. M. H´lary, R. Pedrono. Recherche Op´rationnelle : Exercices Corrig´s. Hermann,
e e e
1982.
[Kar74] Karzanov, A.V. Determining the maximal flow in a network by the method of preflows.
Soviet. Math. Dokl., 15:434-437, 1974.
[MKM78] Malhorta, M.V., Kumar, M.P., Mahes Hwari S.N. An algorithm for finding maximum
flow in network. Inf. Proc. Letters, 7(6):277-278, 1978.
[Ros83] ROSEAUX. Exercices et Probl`mes r´solus de Recherche Op´rationnelle, tome 1.
e e e
Masson, 1983.
[Roy70] B. Roy. Alg`bre Moderne et Th´orie des Graphes, tomes 1 2. Dunod, 1970.
e e
c IFSIC 2004](https://image.slidesharecdn.com/c66-110401170018-phpapp01/85/C66-185-320.jpg)
























































































