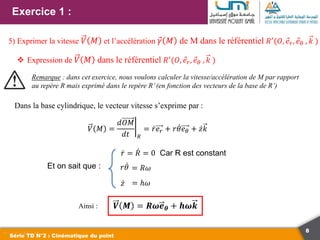
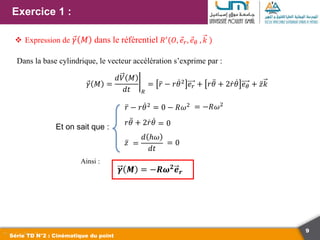
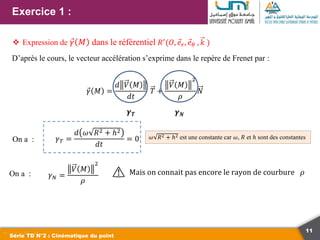
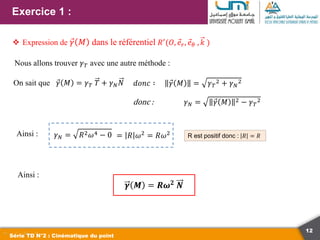
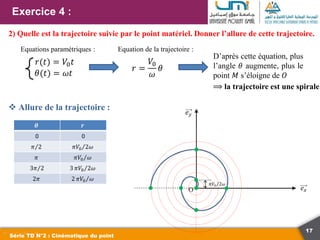
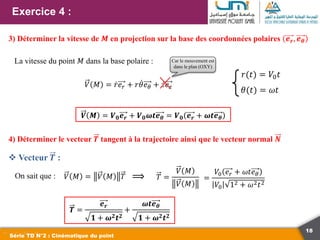
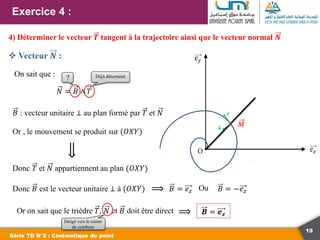
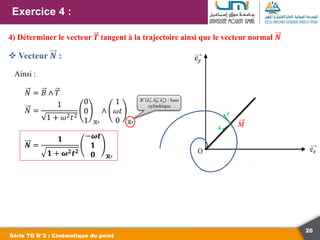
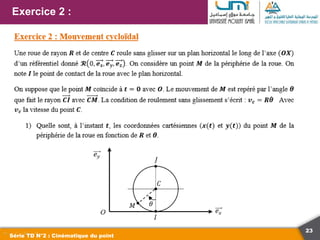
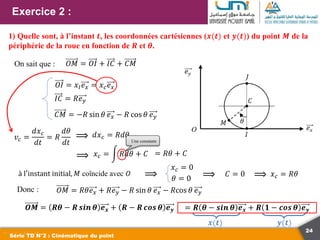
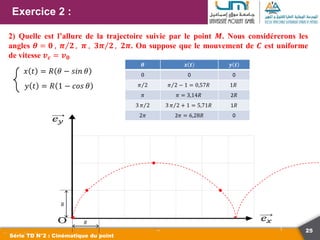
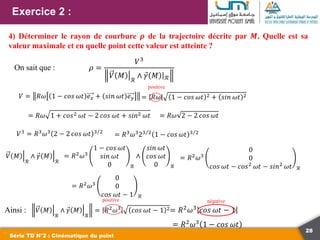
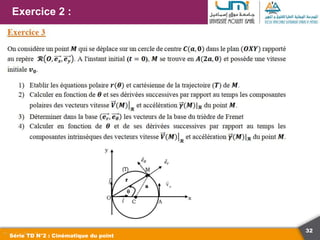
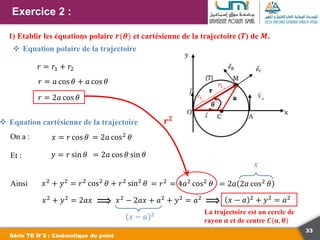
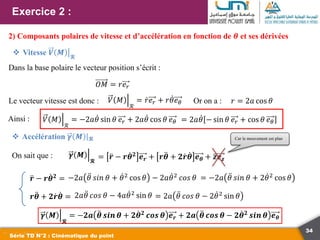
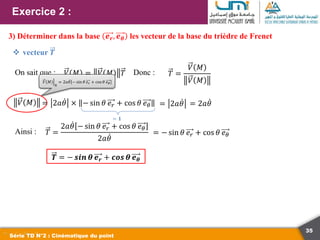
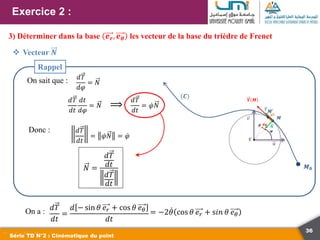
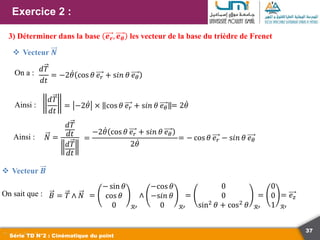
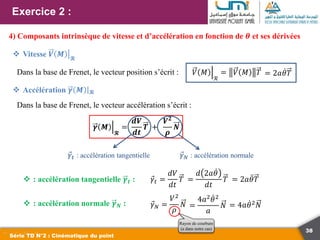
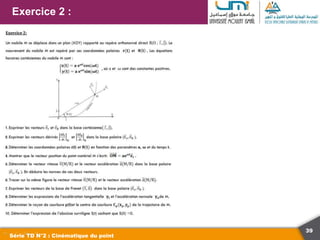
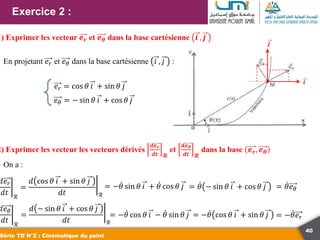
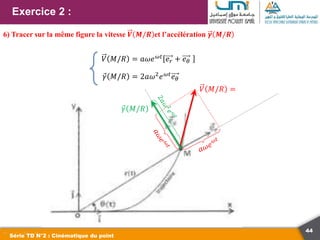
Ce document présente des exercices de cinématique du point pour les étudiants de première année en sciences et techniques. Il aborde des concepts tels que la détermination des vecteurs position, vitesse, et accélération dans différents référentiels, y compris cartésien, cylindrique et de Frenet. De plus, il inclut des équations paramétriques pour des mouvements spécifiques comme celui d'une spirale, ainsi que des calculs liés aux trajectoires et à l'accélération.