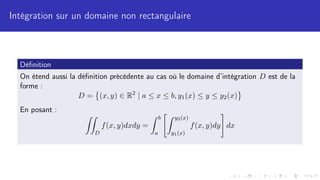
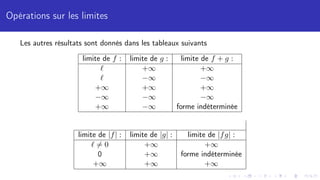
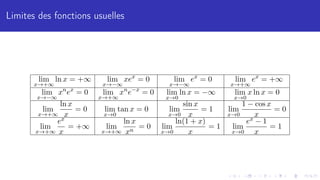
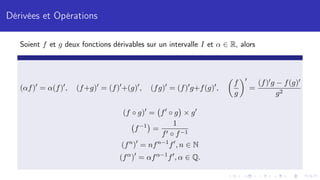
Le document présente des concepts fondamentaux en mathématiques, notamment des fonctions numériques, des limites, la continuité et la dérivabilité. Il définit des termes clés tels que les intervalles, les voisinages et les formes indéterminées, ainsi que des théorèmes essentiels comme le théorème des valeurs intermédiaires. Enfin, il traite des dérivées et de leurs propriétés, fournissant des méthodes pour calculer la dérivée d'une fonction.

![Intervalle de R
Soient a et b deux éléments de R tels que a b. On appelle intervalle semi-ouvert à
droite (resp. à gauche) d’extrimités a et b le sous ensemble de R noté [a, b[( resp. ]a, b])
défini par :
[a, b[= {x ∈ R : a ≤ x b} ( resp .]a, b] = {x ∈ R : a x ≤ b})
Soit a un nombre réel. On appelle intervalle ouvert de centre a toute intervalle de type
]a − ε, a + ε[
où ε désigne un nombre réel strictement positif. Enfin, on pose
[a, +∞[= {x ∈ R : x ≥ a}] − ∞, a] = {x ∈ R : x ≤ a}
]a, +∞[= {x ∈ R : x a}] − ∞, a[= {x ∈ R : x a}](https://image.slidesharecdn.com/mathematiques1-gestion-240120143503-9de5ce57/85/Mathematiques-1-Gestion-pdf-6-320.jpg)



![Continuité sur un intervalle
Définition
Soit f une fonction définie sur un intervalle I.
• Si I est un intervalle ouvert et si f est continue en tout point de I, on dit
que f est continue sur I.
• Si I = [a, b], ont dit que f est continue sur I lorsque f est continue sur
]a, b[,, continue à droite en a et continue à gauche en b.](https://image.slidesharecdn.com/mathematiques1-gestion-240120143503-9de5ce57/85/Mathematiques-1-Gestion-pdf-24-320.jpg)
![Théorème des valeurs intermédiaires
Théorème
Soit f une fonction réelle continue sur un intervalle I = [a, b]. Alors pour tout valeur k
comprise entre f(a) et f(b), il existe au moins un c ∈ [a, b] tel que k = f(c).
Autrement dit, toute valeur intermédiaire aux images de deux points d’un intervalle où
f est continue est elle même une image et admet un antécédent intermédiaire à ces
deux points.
Corollaire
Si une fonction f est continue sur un intervalle fermé [a, b] et f(a)× f(b) 0 alors il
existe au moins c ∈]a, b[ tel que f(c) = 0.
Autrement dit, une fonction continue ne peut pas changer de signe sur un intervalle
qu’en s’annulant en un point de cet intervalle.](https://image.slidesharecdn.com/mathematiques1-gestion-240120143503-9de5ce57/85/Mathematiques-1-Gestion-pdf-26-320.jpg)

![Dérivabilité
Example 2
La fonction f(x) =
√
x est dérivable sur I =]0, +∞ [. En effet ; soit x0 ∈ I,, on a :
√
x −
√
x0
x − x0
=
1
√
x +
√
x0
, et f0
(x0) = lim
x→x0
1
√
x +
√
x0
=
1
2
√
x0
.](https://image.slidesharecdn.com/mathematiques1-gestion-240120143503-9de5ce57/85/Mathematiques-1-Gestion-pdf-29-320.jpg)


![Théorèmes fondamentales
Théorème des accroissements finis
Soit f une fonction continue sur [a, b] et dérivable sur ]a, b[, alors il existe c ∈]a, b[ tel
que
f(a) − f(b) = f0
(c)(a − b).
Théorème de Rolle
Soit f une fonction continue sur [a, b] et dérivable sur ]a, b[ telle que f(a) = f(b), alors
il existe c ∈]a, b [ tel que f0(c) = 0.](https://image.slidesharecdn.com/mathematiques1-gestion-240120143503-9de5ce57/85/Mathematiques-1-Gestion-pdf-37-320.jpg)
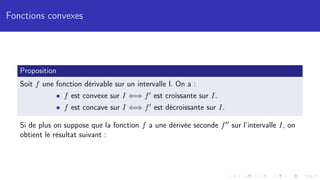
![Convexité
Soit f une fonction réelle définie sur un intervalle I et Cf sa courbe représentative
Définition
On dit f est convexe si et seulement si
∀x ∈ I, ∀y ∈ I, ∀t ∈ [0, 1], f((1 − t)x + ty) ≤ (1 − t)f(x) + tf(y)
On dit f est concave si et seulement si
∀x ∈ I, ∀y ∈ I, ∀t ∈ [0, 1], f((1 − t)x + ty) ≥ (1 − t)f(x) + tf(y)](https://image.slidesharecdn.com/mathematiques1-gestion-240120143503-9de5ce57/85/Mathematiques-1-Gestion-pdf-38-320.jpg)






![l’intégrale
Qu’est-ce qu’une intégrale ?
Considérons une fonction continue f de [a; b] dans R. Supposons pour le moment que
f est positive sur [a; b]. Son graphe Cf est donc situé au-dessus de l’axe des abscisses.
On voudrait définir et calculer l’aire A de la surface située entre Cf et l’axe des
abscisses, pour a ≤ x ≤ b.](https://image.slidesharecdn.com/mathematiques1-gestion-240120143503-9de5ce57/85/Mathematiques-1-Gestion-pdf-67-320.jpg)
![l’intégrale
Définition
On dit que
R b
a f(x)dx est l’intégrale de f sur [a; b].](https://image.slidesharecdn.com/mathematiques1-gestion-240120143503-9de5ce57/85/Mathematiques-1-Gestion-pdf-68-320.jpg)
![Propriétés des intégrales
Proposition
Linéarité de l’intégrale
Si f et g sont continues sur [a; b], et si λ ∈ R, alors :
1
R b
a [f(x) + g(x)]dx =
R b
a f(x)dx +
R b
a g(x)dx ;
2
R b
a [λ × f(x)]dx = λ ×
R b
a f(x)dx.
Si a b, alors on pose
R b
a f(x)dx = −
R a
b f(x)dx.
Si a ≤ b, et si f est continue et positive sur [a; b], alors
R b
a f(x)dx ≥ 0.](https://image.slidesharecdn.com/mathematiques1-gestion-240120143503-9de5ce57/85/Mathematiques-1-Gestion-pdf-69-320.jpg)
![Propriétés des intégrales
Proposition
f et g deux fonctions continues sur [a; b], avec a ≤ b. Si f(x) ≤ g(x) pour tout
x ∈ [a; b], alors
R b
a f(x)dx ≤
R b
a g(x)dx.
Relation de Chasles
Soient f et g deux fonctions continues sur un intervalle I, et considérons a, b et c trois
réels éléments de I. On a alors :
R b
a f(x)dx +
R c
b f(x)dx =
R c
a f(x)dx.](https://image.slidesharecdn.com/mathematiques1-gestion-240120143503-9de5ce57/85/Mathematiques-1-Gestion-pdf-70-320.jpg)
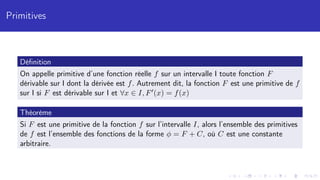
![Tableau des primitives
Le tableau suivant contient des primitives usuelles
Fonction Intervalles de définition Primitive
xn(n 6= −1) ] 0, +∞[ xn+1
n+1
sin x R − cos x
cos x R sin x
1 + tg2 x π
2 + kπ, π
2 + kπ[, k ∈ Z tg x
ex R ex
1
x ]−∞, 0[ ou ]0, +∞[ log |x|](https://image.slidesharecdn.com/mathematiques1-gestion-240120143503-9de5ce57/85/Mathematiques-1-Gestion-pdf-71-320.jpg)
![Méthodes d’intégration
Intégration par partie
Si f et g sont deux fonctions de classe C1 sur [a, b], alors
Z b
a
u0
(t)v(t)dt = [u(t)v(t)]b
a −
Z b
a
u(t)v0
(t)dt
qui s’écrit en termes de primitives :
Z
u0
(t)v(t)dt = u(t)v(t) −
Z
u(t)v0
(t)dt](https://image.slidesharecdn.com/mathematiques1-gestion-240120143503-9de5ce57/85/Mathematiques-1-Gestion-pdf-73-320.jpg)
![Intégration par partie
Exemple
Calcul de I =
R 1
0 x exp(x)dx On pose u(x) = x et v0(x) = exp(x). On a alors
u0(x) = 1 et on peut poser v(x) = exp(x). La formule d’intégration par parties donne
alors :
I = [x exp(x)]1
0 −
Z 1
0
exp(x)dx = exp(1) − [exp(x)]1
0 = e1
− e1
− e0
= e0
= 1](https://image.slidesharecdn.com/mathematiques1-gestion-240120143503-9de5ce57/85/Mathematiques-1-Gestion-pdf-74-320.jpg)
![Méthodes d’intégration
Changement de variable
Si f une fonction continue sur [a, b] et si u est une fonction dérivable avec u0 continue
sur [α, β] telle que u([α, β]) ⊂ [a, b], alors
Z β
α
f(u(t))u0
(t)dt =
Z u(β)
u(α)
f(x)dx](https://image.slidesharecdn.com/mathematiques1-gestion-240120143503-9de5ce57/85/Mathematiques-1-Gestion-pdf-75-320.jpg)

![Intégrales généralisées
Exemple
1 Soit f définie par f(x) = 1
x2 sur x ≥ 1.
Z b
1
1
x2
dx =
−
1
x
b
1
= −
1
b
+ 1 qui tend vers 1 si b → +∞
donc
R +∞
1
1
x2 dx existe et vaut
R +∞
1
1
x2 dx = limb→+∞
R b
1
1
x2 dx = 1.
2 Soit f définie par f(x) = 1
x sur x ≥ 2.
Z b
2
1
x
dx = [ln(x)]b
2 = ln(b) − ln(2) qui tend vers + ∞ si b → +∞
donc
R +∞
2
1
xdx diverge.](https://image.slidesharecdn.com/mathematiques1-gestion-240120143503-9de5ce57/85/Mathematiques-1-Gestion-pdf-78-320.jpg)
![Intégration sur un rectangle
Définition
Soit D = [a, b] × [c, d] un rectangle de R2 et f une fonction continue sur D, à valeurs
réelles. On définit
ZZ
D
f(x, y)dxdy =
Z b
a
Z d
c
f(x, y)dy
dx
On admettra que l’on peut aussi écrire :
ZZ
D
f(x, y)dxdy =
Z d
c
Z b
a
f(x, y)dx
dy =
Z b
a
Z d
c
f(x, y)dy
dx](https://image.slidesharecdn.com/mathematiques1-gestion-240120143503-9de5ce57/85/Mathematiques-1-Gestion-pdf-79-320.jpg)