Télécharger pour lire hors ligne
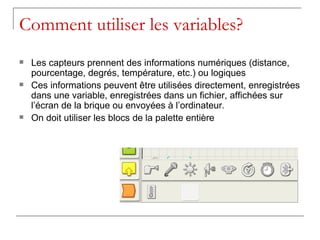
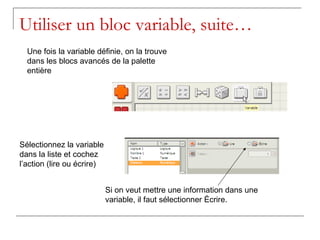
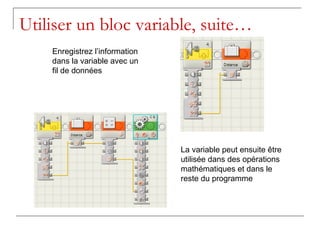
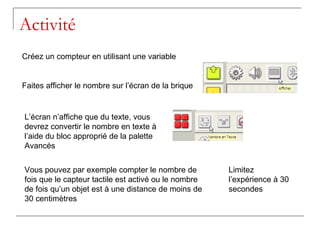

Les variables en robotique servent à stocker des valeurs numériques qui peuvent varier et sont utilisées pour traiter des informations provenant des capteurs du robot. Les variables permettent de communiquer et d'analyser des données, et peuvent être intégrées dans des opérations mathématiques au sein du programme. Un exemple d'application est la création d'un compteur pour afficher des valeurs sur l'écran du robot.
































