Télécharger en tant que PPS, PPTX









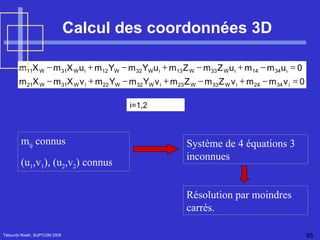
![Estimation de la matrice fondamental Tébourbi Riadh, SUP'COM 2005 F peut estimée calculée à partir de l'ensemble des points homologues m 1 (u 1 ,v 1 ) et m 2 (u 2 ,v 2 ) K= [u 1 u 2 , v 1 u 2 ,u 2 ,u 1 v 2 ,v 1 v 2 ,v 2 ,u 1 ,v 1 ,1] et F définie à un facteur multiplicatif près On peut poser F 33 = 1 Avec](https://image.slidesharecdn.com/Reconstruction3D-122933617733-phpapp02/85/Reconstruction-3-D-94-320.jpg)



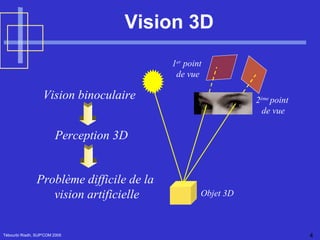
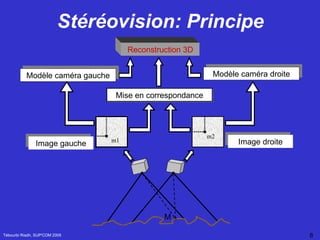
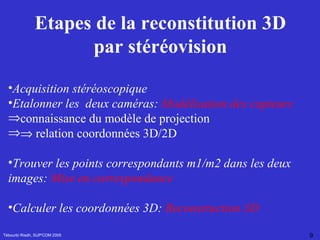
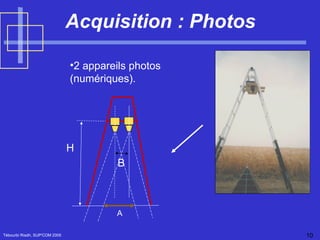
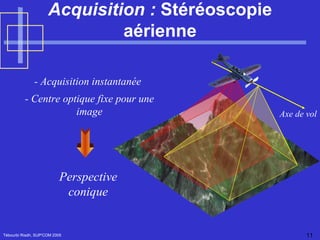
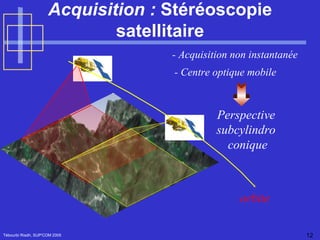
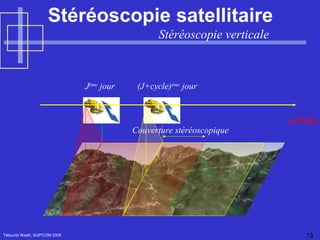
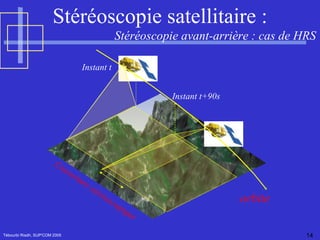
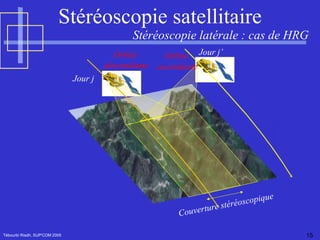
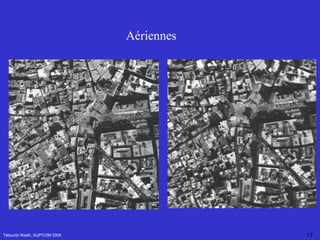
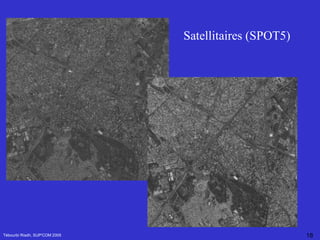
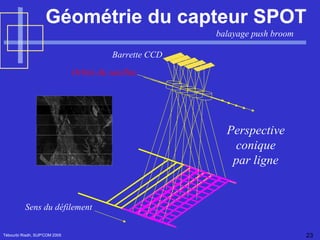
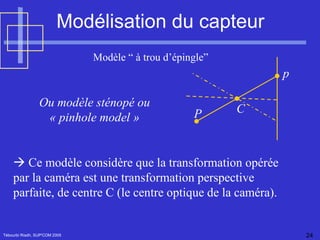
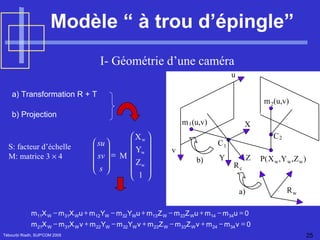
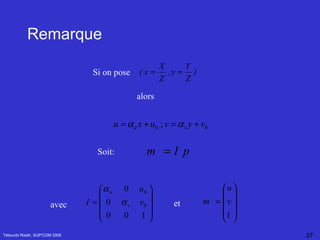
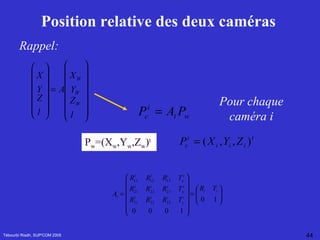
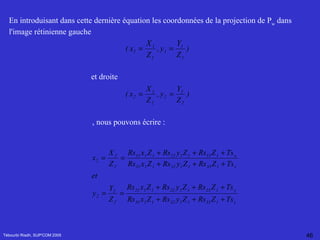
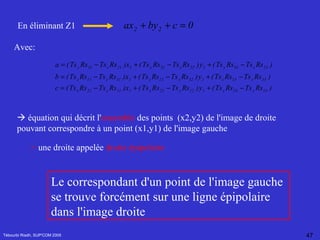
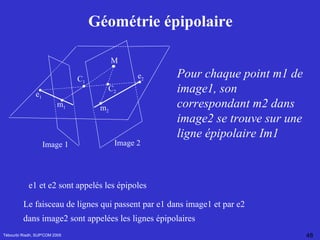
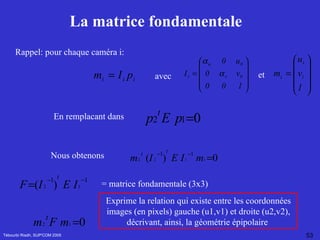
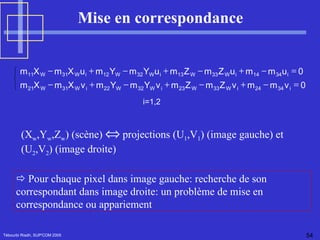
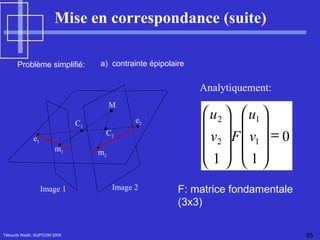
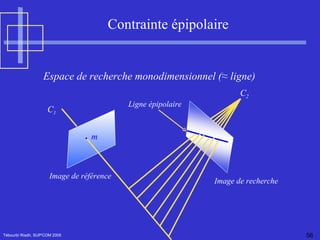
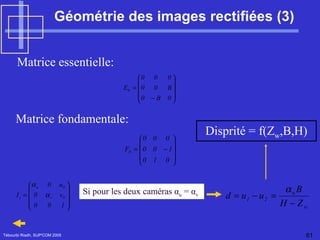
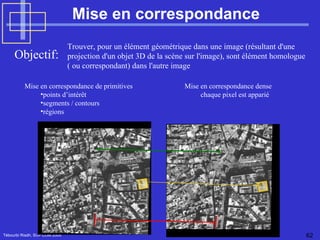
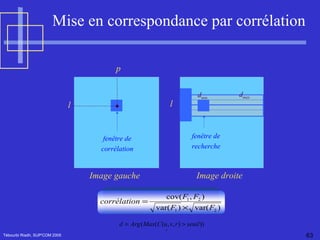
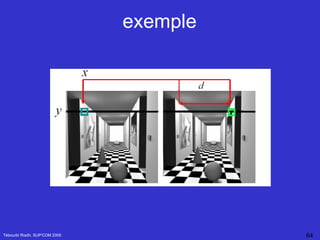
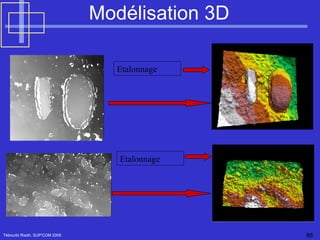
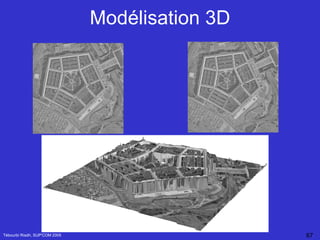
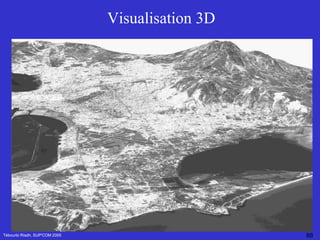
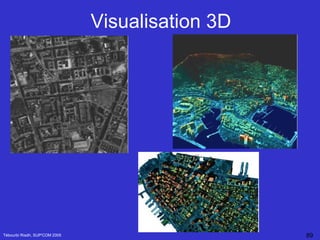
Le document traite de la vision par ordinateur, en se concentrant sur l'imagerie 3D et les méthodes passives et actives pour acquérir des informations tridimensionnelles. Il présente des techniques telles que la stéréovision et l'étalonnage des caméras, ainsi que la modélisation de la géométrie des capteurs. Enfin, il explore des applications pratiques, notamment en imagerie médicale et en stéréoscopie, en décrivant des concepts clés tels que la matrice essentielle et la géométrie épipolaire.









































