Téléchargé 104 fois


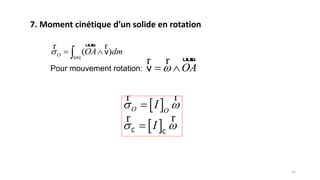
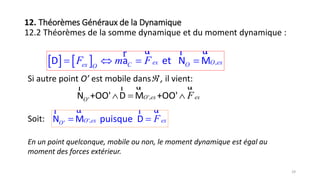
![3. Moment d’inertie
3.2 Opérateur d’inertie
2
2
2
2 2 2
2 2 2
0A
; OA ; ( ) ( ) ( )
2 2 2
e [c:
.
]v
i
xx yy zz xy xz yz O
xx xy xz
xy yy yz
xz yz
I r dm u OA dm
x
u y u OA z y z x x y
z
I I I I I I I u I u
I I I
I I I I
I I
uuurr
uuur uuurr r
r r
:
zzI
𝐴(𝑑𝑚)
)
0Nous obtenons: .[ ]I u I u
r r](https://image.slidesharecdn.com/institutedetechnologieducambodge-160829112120/85/Vibration-Mecanique-11-320.jpg)
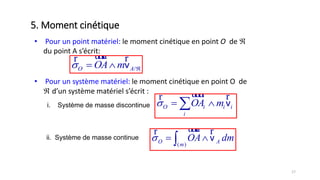
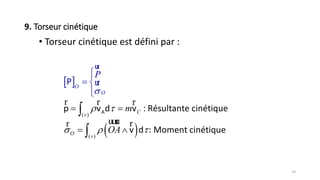
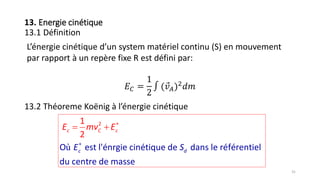
![3. Moment d’inertie
3.2 Opérateur d’inertie
𝑟
0
2 2
2 2
[ ] : ' '
( ) : le moment d'inertie par rapport à axe (Ox)
( ) : le moment d'in
Avec
ertie p
:
ar rapport
xx xy xz
xy yy yz
xz yz zz
xx
yy
I I I
I I I I Matriced inertie ou opérateur d inertie
I I I
I y z dm
I x z dm
2 2
à axe (Oy)
= ( ) : le moment d'inertie par rapport à (Oz)
, , : le produit d'inertie
zz
xy xz yz
I x y dm
I xydm I xzdm I yzdm
](https://image.slidesharecdn.com/institutedetechnologieducambodge-160829112120/85/Vibration-Mecanique-12-320.jpg)






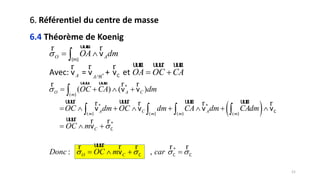

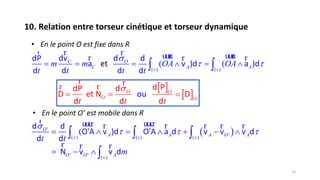






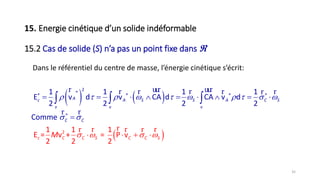



















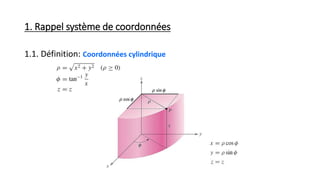
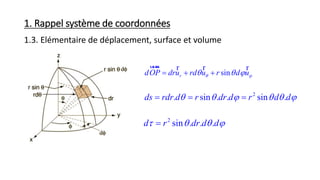
![66
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Time [s]
Amplitude[m]
x1
x2
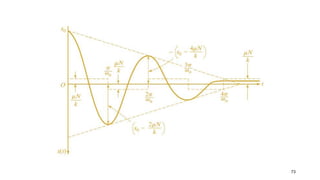
Xm+1
j3 m1 1 2
m 1 2 3 4 m 1 j 1
m m1 1
m 1 m 1
xx xx x x
.... ,mais e
x x x x x x
x x1
e e , Donc: ln
x m x
](https://image.slidesharecdn.com/institutedetechnologieducambodge-160829112120/85/Vibration-Mecanique-66-320.jpg)























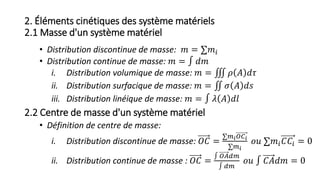
Le document présente le contenu d'un cours sur la vibration mécanique au sein de l'Institut de Technologie du Cambodge, abordant des concepts fondamentaux tels que les systèmes de coordonnées, la masse, le centre de masse et le moment d'inertie. Il comprend également des discussions sur la quantité de mouvement, le moment cinétique, et le référentiel du centre de masse. Enfin, des théorèmes comme celui de Huygens-Schteiner et du moment cinétique d'un solide en rotation sont également traités.



































































