Téléchargé 191 fois


![0.1 D´finition d’un milieu granulaire
e `
TABLE DES MATIERES
Introduction
Au repos ou en ´coulement, la mati`re en grains ne manque pas de surprendre par ses
e e
propri´t´s particuli`res entre solides et liquides...
ee e
Les enjeux
Les mat´riaux granulaires sont pr´sents dans de nombreux secteurs industriels, cepen-
e e
dant leur ´tude reste tr`s r´cente. La description de leur comportement et la compr´hen-
e e e e
sion des ph´nom`nes observ´s est donc primordiale.
e e e
Une dualit´ Liquide/Solide
e
Le grand nombre de particules constituantes et la complexit´ des interactions de
e
contact conduisent ` une multitude de comportements diff´rents. Ainsi les milieux gra-
a e
nulaires existent sous plusieurs ´tats.
e
On observe donc un comportement solide sous certaines solicitations, liquide sous
d’autres, mais ´galement des comportements ayant simultan´ment les propri´t´s de ces
e e ee
deux ´tats.
e
Le sablier
L’observation anodine d’un sablier soul`ve ` elle seule de multiples interrogations :
e a
Contrairement ` la clepsydre, pourquoi le sablier conserve-t-il un d´bit constant ? Pour-
a e
quoi le tas inf´rieur garde-t-il le mˆme angle de talus au cours du remplissage ?
e e
Notions pr´liminaires
e
0.1 D´finition d’un milieu granulaire
e
On appelle ici un milieu granulaire un milieu form´ d’une collection de particules
e
macroscopiques de taille sup´rieure ` 100µm. En minorant la taille de ces grains, on peut
e a
n´gliger les forces de Van der Walls, les ponts capillaires, les mouvements browniens et
e
les forces ´lectrostatiques entre les particules.
e
0.2 Tenseurs de contraintes
On souhaite d´crire le milieu granulaire comme un mat´riau continu. On introduit
e e
alors le tenseur des contraintes, qui repr´sente les forces surfaciques s’exer¸ant sur lui.
e c
On le d´finit pour un ´l´ment rectangulaire ´l´mentaire de mat´riau.[cf sch´ma 1]
e ee ee e e
En deux dimensions, les composantes du tenseur des contraintes sont les suivantes :
– σxx la composante normale, selon − , des forces surfaciques s’exer¸ant sur les faces
→
ex c
verticales
– σzz la composante normale, selon − , des forces s’exer¸ant sur les faces horizontales
→ez c
– σxz la composante tangentielle (force de cisaillement), selon − , des forces s’exer¸ant
→
ez c
sur les faces verticales
2](https://image.slidesharecdn.com/tipedossier-110829161348-phpapp01/85/TIPE-Les-milieux-granulaires-2-320.jpg)


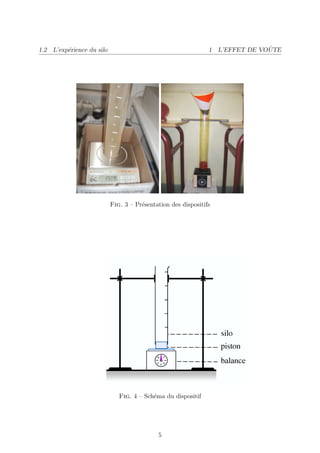


![1.3 Mod´lisation physique : Approche de Janssen
e ˆ
1 L’EFFET DE VOUTE
1.3 Mod´lisation physique : Approche de Janssen
e
On consid`re un silo cylindrique de diam`tre D remplit d’un mat´riau granulaire. Le
e e e
mod`le choisit a ´t´ propos´ par Janssen en 1895, il reste d’une grande simplicit´.
e ee e e
il est bas´ sur 3 hypoth`ses :
e e
1. les contraintes verticales σzz ne d´pendent que de la variable d’espace z
e
2. le milieu frotte sur les parois lat´rales et se trouve sur le point de glisser : T = µs N
e
(avec µs le coefficient de frottement statique)
3. la contrainte verticale σzz appliqu´e sur le mat´riaux engendre une contrainte hori-
e e
zontale σxx qui lui est directement proportionnelle : σxx = Kσzz . (K ´tant constante,
e
pour un fluide la pression est isotrope on aurait K = 1)
Equilibre d’une tranche ´l´mentaire de mat´riau [z, z + dz] :
ee e
Fig. 6 – Syst`me ´tudi´ : tranche cylindrique de diam`tre D
e e e e
bilan des efforts : poids, forces de pression en z et en z + dz, forces de frottement avec
la paroie.
En projetant le th´or`me fondamental de la statique sur l’axe vertical :
e e
πD2 πD2
ρgdz + (σzz |z − σzz |z+dz ) − πDdzT = 0 (1)
4 4
ce qui devient en utilisant les hypoth`ses :
e
dσzz 4Kµs
= ρg − σzz (2)
dz D
Sachant que σzz est nulle ` la surface z = 0, on en d´duit que la contrainte verticale
a e
σzz est donn´ par :
e
σzz (z) = ρgλ(1 − ez/λ ) (3)
8](https://image.slidesharecdn.com/tipedossier-110829161348-phpapp01/85/TIPE-Les-milieux-granulaires-8-320.jpg)






![2.2 Mod´lisation des ´coulements
e e 2 LES ECOULEMENTS DENSES
D’o` en utilisant le th´or`me d’Ostrogradsky
u e e
div(ρ − )dV = 0
→
v (7)
τ
ceci ´tant valable pour tout volume τ , on en d´duit
e e
div − = 0
→
v (8)
ce qui s’´crit encore dans le cas de notre probl`me plan, avec − = u(x, z, t, ) − +v(x, z, t) − ,
e e →
v →
ex →
ez
∂u ∂v
+ =0 (9)
∂x ∂z
Conservation de la quantit´ de mouvement
e
∂ρ −
→
v →→ − −
→ −−
→ →
−
dV = − ρ − (− . d2 S)
v v + [σ] d2 S + F dV
τ ∂t Σ Σ τ
quantite de mouvement f lux de la quantite de mouvement f orces de surf ace f orces de volume (poids ρ − )
→
g
(10)
Nous allons ramener chaque int´grale surfacique en int´grale volumique en utilisant
e e
le th´or`me d’Ostrogradsky
e e
Concernant les forces de surface :
−−
→ −→
[σ] d2 S = div[σ]dV (11)
Σ τ
−→ ∂σxx ∂σxy ∂σxz
o` (div[σ])x =
u + +
∂x ∂y ∂z
Concernant le flux de la quantit´ de mouvement :
e
→→ −
v v
−
→
ρ − (− . d2 S) =
→
−→
div(ρvx v) − +div(ρvy − ) − +div(ρvz − ) − dV )(12)
ex → →
v ey → →
v ez
Σ τ
= → −→ →
v
−
ρ(− . grad)(− ) + − div(ρ − ) dV
v →
v →
v (13)
τ
= → −→ →
v
−
ρ(− . grad)(− )dV
v (14)
τ
Ainsi on tire de (10) :
∂ρ −→
v → −→ →
− −→ →
−
= −ρ(− . grad)(− ) + div[σ] + F
v v (15)
∂t
on reconnait ici la d´riv´e particuli`re
e e e
Dρ −
→
v −→ →
−
= div[σ] + F (16)
Dt
16](https://image.slidesharecdn.com/tipedossier-110829161348-phpapp01/85/TIPE-Les-milieux-granulaires-16-320.jpg)


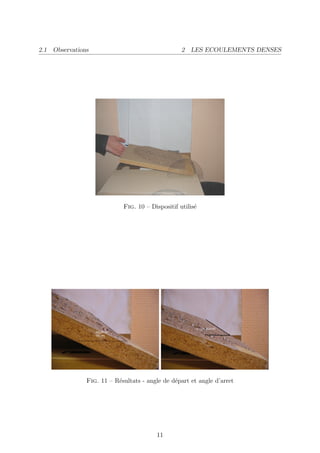
![2.2 Mod´lisation des ´coulements
e e 2 LES ECOULEMENTS DENSES
un sablier, les comportements ´tranges des milieux granulaires se rencontrent aussi au
e
niveau de leurs ´coulements, que ce soit sur un plan ou dans un tambour.
e
D’autres domaines d’´tude concernant les milieux granulaires existent. Parmis eux
e
figurent l’´tude des interactions entre particules, les ph´nom`nes de s´gr´gation, de com-
e e e e e
paction, de dilatance, de r´sistance au cisaillement...
e
On parvient ` mod´liser des avalanches, et ` approcher les ´quations qui r´gissent
a e a e e
ces ´coulements, n´anmoins, leur port´e est tr`s limit´e. Les conditions d’applications,
e e e e e
les approximations utilis´es empˆchent toute g´n´ralisation. Par exemple, on s’est rendu
e e e e
compte que des mod´lisations effectu´es pour des ´coulements en tambour pour une cer-
e e e
rayon du tambour
taine tranche de rapports dimension des grains n’avaient plus de valeur pour des rapports
diff´rents. De nombreuses difficult´s restent ` surmonter, et aucune th´orie g´n´rale n’a
e e a e e e
encore ´t´ ´tablie dans cette science tr`s jeune mais tr`s dynamique.
eee e e
Et pour cause, ses applications dans l’industrie sont consid´rables : on estime que
e
70 % des produits fabriqu´s passent ` un moment au moins de leur ´laboration par un
e a e
stade granulaire. De l’activit´ mini`re ` la fabrication du b´ton, de l’industrie chimique ou
e e a e
pharmaceutique ` l’agroalimentaire, en passant par la mod´lisation des ´coulements py-
a e e
roclastiques et mˆme le broyage [(dont le cout global est sup´rieur ` celui du transport !)],
e e a
tous les domaines sont concern´s.e
Bibliographie
– La physique des tas de sable - Ph. Claudin - EDPscience - 1999
– Les milieux granulaires - O.Pouliquen - Cours de l’ENSTA - 2001
– Du sac de billes au tas de sable - Etienne Guyon, Jean-Paul Troadec - Odile
Jacob - 1994
– M´canique g´n´rale : Elastostatique - Ecole nationale sup´rieure de l’a´ronau-
e e e e e
tique et de l’espace - 1973
– sujets de concours : ´cole polytechnique - 1999 - ´cole normale sup´rieure de
e e e
Cachan - 2002
Contacts
V´ronique Falk, Enseignant-chercheur ` l’ENSIC Nancy
e a
19](https://image.slidesharecdn.com/tipedossier-110829161348-phpapp01/85/TIPE-Les-milieux-granulaires-19-320.jpg)
![2.2 Mod´lisation des ´coulements
e e 2 LES ECOULEMENTS DENSES
Annexe
Code source du programme ”avalanche” ti-89
:Prgm
:
:EffDess
:0->ymin :hauteur->ymax
:0->xmin :hauteur->xmax
:
:{hauteur}->l
:Lign 1,0,1,hauteur
:
:hauteur->h
:While h <> 1: h-nbrAl´at(2)->h: augmente(l,{h})->l: dim(l)->di: Lign di,0,di,l[di]
e
:EndWhile
:Pause
:
:Prompt perturb :Lbl c
:l[perturb]+2->l[perturb] :Lign perturb,0,perturb,l[perturb]
:
:For i,2,dim(l),1
:If l[i-1]-l[i]=3 Then
:l[i-1]-2->l[i-1] :Lign i-1,l[i-1],i-1,l[i-1]+2,0 :l[i]+2->l[i]
:Lign i,l[i]-2,i,l[i],1
:
:ElseIf l[i-1]-l[i]=4 Then
:l[i-1]-3->l[i-1] :Lign i-1,l[i-1],i-1,l[i-1]+3,0 :l[i]+3->l[i]
:Lign i,l[i]-3,i,l[i],1
:
:ElseIf l[i-1]-l[i]>4 Then
:l[i-1]-4->l[i-1] :Lign i-1,l[i-1],i-1,l[i-1]+4,0 :l[i]+4->l[i]
:Lign i,l[i]-4,i,l[i],1
:EndIf
:EndFor
:
:Goto c
:
:EndPrgm
20](https://image.slidesharecdn.com/tipedossier-110829161348-phpapp01/85/TIPE-Les-milieux-granulaires-20-320.jpg)

Le document traite des milieux granulaires, qui présentent des caractéristiques à la fois solides et liquides, et explore leur comportement à travers des expériences et modélisations. Il décrit comment les contraintes sont transmises dans ces milieux, en mettant en avant le modèle de Janssen pour comprendre la pression dans un silo. Les observations réalisées montrent la complexité des écoulements denses de matériaux granulaires et leur dualité dans des états variés.












































