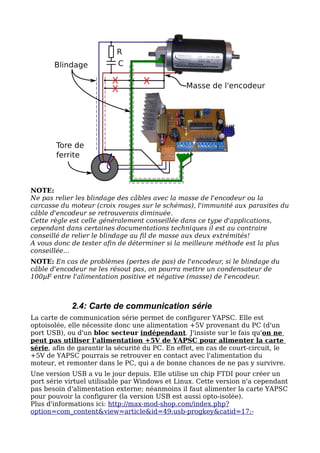
Le document est un manuel d'utilisation de la carte YAPSC, un contrôleur de servomoteurs conçu pour les machines à commande numérique, spécifiquement pour les servomoteurs DC avec encodeur. Il détaille les caractéristiques techniques, le câblage, la configuration, et les instructions de branchement, tout en soulignant l'importance de l'isolation et du câblage approprié pour minimiser les interférences électromagnétiques. Des sections spécifiques sont consacrées à la configuration PID et à l'interface de communication série pour un contrôle optimal de la carte.







![L1024
Cette commande (validée par le touche [Entrée]) définit la limite d'erreur à
1024 impulsions de l'encodeur, soit 1024/4 = 256 lignes d'encodeur.
Lorsque cette valeur d'erreur est dépassée, la sortie moteur est désactivée et
la carte envoie « max error excedeed » sur le port série, jusqu'à ce qu'on
désactive puis réactive la carte (entrée ENABLE).
NOTE: La commande suivante permet de désactiver le contrôle d'erreur
maximale:
L0
NOTE: Une nouvelle option verra bientôt le jour: choix entre court-circuiter le
moteur en cas d'erreur, et (comme c'est le cas actuellement) désactiver la
sortie. Dans le premier cas, en cas d'erreur le moteur se comportera comme
un frein passif. La machine s'arrêtera donc plus rapidement.
Le frein passif est particulièrement important dans le cas de l'axe Z d'une
machine : la broche descend généralement toute seule du fait de son poids.
ATTENTION!
Ne désactivez la limite d'erreur que si vous êtes absolument certain de ce que
vous faites! En cas de déconnection de l'encodeur, le servomoteur va
s'emballer; il va prendre de la vitesse sans s'arrêter! Le résultat est dans la
plus part des cas un crash de la machine!
ATTENTION!
YAPSC ne signale pas que l'erreur max. est dépassée. Ainsi si un axe s'arrête,
les autres continueront à bouger!
Ceci sera corrigé, afin d'immobiliser la machine et d'arrêter la broche en cas
de soucis, afin de préserver la machine outil.
3.1.3 :Sortie maximale
YAPSC offre la possibilité de limiter la tension de sortie. On peut configurer
YAPSC pour sortir de 0 à 95% de la tension d'alimentation au servomoteur.
Cela permet de panacher les servomoteurs de cartes reliées à une seule
alimentation. On peut donc contrôler des moteurs dont la tension de service
est 24V avec d'autres moteurs dont la tension de service est 36V, 48V ou plus.
Il faudra cependant veiller à utiliser une alimentation dont la tension de sortie
est au minimum 5% plus élevée que la plus grandes des tensions de service
des servomoteurs pour pouvoir les exploiter au maximum.
La commande M permet d'ajuster cette limite:
M50.35
définit la tension de sortie maximale à 50,35% de la tension d'alimentation.
NOTE:
M0
M95](https://image.slidesharecdn.com/yapsc-manuel-091024015708-phpapp01/85/Yapsc-Manuel-15-320.jpg)