

Recommandé
Contenu connexe
Tendances
Tendances (20)
En vedette
En vedette (20)
Similaire à Resum theorie arpa _
Similaire à Resum theorie arpa _ (13)
Plus de Rabah HELAL
Plus de Rabah HELAL (20)
Resum theorie arpa _
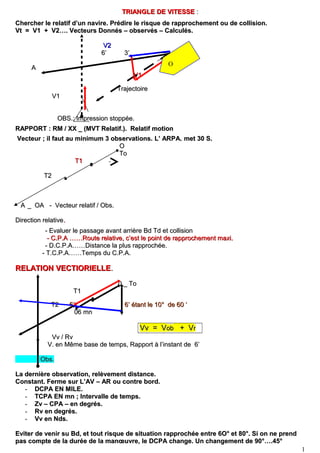
- 1. TRIANGLE DE VITESSETRIANGLE DE VITESSE :: Chercher le relatif d’un navire. Prédire le risque de rapprochement ou de collision.Chercher le relatif d’un navire. Prédire le risque de rapprochement ou de collision. Vt = V1 + V2…. Vecteurs Donnés – observés – Calculés.Vt = V1 + V2…. Vecteurs Donnés – observés – Calculés. V2V2 6’ 3’6’ 3’ AA V1V1 TrajectoireTrajectoire V1V1 OBS.: Impression stoppée.OBS.: Impression stoppée. RAPPORTRAPPORT : RM / XX _ (MVT Relatif.). Relatif motion: RM / XX _ (MVT Relatif.). Relatif motion VecteurVecteur ; il faut au minimum 3 observations.; il faut au minimum 3 observations. L’ ARPA. met 30 S.L’ ARPA. met 30 S. OO ToTo T1T1 T2T2 AA __ OA - Vecteur relatif / Obs.OA - Vecteur relatif / Obs. Direction relativeDirection relative.. - Evaluer le passage avant arrière Bd Td et collision- Evaluer le passage avant arrière Bd Td et collision - C.P.A- C.P.A ……Route relative, c’est le point de rapprochement maxi.……Route relative, c’est le point de rapprochement maxi. - D.C.P.A……Distance la plus rapprochée.- D.C.P.A……Distance la plus rapprochée. - T.C.P.A……Temps du C.P.A.- T.C.P.A……Temps du C.P.A. RELATION VECTIORIELLERELATION VECTIORIELLE.. 0 _ To0 _ To T1T1 T2T2 6’ 6’ étant le 10° de 60 ‘6’ 6’ étant le 10° de 60 ‘ 06 mn06 mn Vv = VVv = Vobob + V+ Vrr Vv / RvVv / Rv V. en Même base de temps, Rapport à l’instant de 6’V. en Même base de temps, Rapport à l’instant de 6’ Obs.Obs. La dernière observation, relèvement distance.La dernière observation, relèvement distance. Constant. Ferme sur L’AV – AR ou contre bord.Constant. Ferme sur L’AV – AR ou contre bord. -- DCPA EN MILE.DCPA EN MILE. -- TCPA EN mnTCPA EN mn ; Intervalle de temps.; Intervalle de temps. -- Zv – CPA – en degrés.Zv – CPA – en degrés. -- Rv en degrés.Rv en degrés. -- Vv en Nds.Vv en Nds. Eviter de venir su Bd, et tout risque de situation rapprochée entre 6O° et 80°. Si on ne prendEviter de venir su Bd, et tout risque de situation rapprochée entre 6O° et 80°. Si on ne prend pas compte de la durée de la manœuvre, le DCPA change. Un changement de 90°….45°pas compte de la durée de la manœuvre, le DCPA change. Un changement de 90°….45° 1 O
- 2. -- Revenir route initiale.Revenir route initiale. -- Revenir progressivement, petit changement de route.Revenir progressivement, petit changement de route. -- Distance de sécurité sup. à 2’Distance de sécurité sup. à 2’ -- On n’accepte aucune cible à l’intérieur.On n’accepte aucune cible à l’intérieur. -- Retour au plutôt.Retour au plutôt. -- Routes // jusqu’à ce que le danger soit écarté.Routes // jusqu’à ce que le danger soit écarté. RemarqueRemarque : Plusieurs cibles – revenir le plus tard. – Delay time / ARPA.: Plusieurs cibles – revenir le plus tard. – Delay time / ARPA. PRÉSENTATION RELATIVE CPA ET MESURE DE L’INSTANT CPA.PRÉSENTATION RELATIVE CPA ET MESURE DE L’INSTANT CPA. CPACPA PositionPosition Initiale.Initiale. 0S0S Navire Porteur.Navire Porteur. PRÉSENTATION À MOUVEMENT VRAI.PRÉSENTATION À MOUVEMENT VRAI. Route Vraie.Route Vraie. Vitesse Vraie.Vitesse Vraie. DCPADCPA TT..CPACPA.. Vr - RrVr - Rr CPACPA. 6mn. 6mn.. Vv _ RvVv _ Rv Vitesse du Navire Porteur.Vitesse du Navire Porteur. Vt. Vitesse d’entraînement.Vt. Vitesse d’entraînement. Route Vraie.Route Vraie. R A D A R _ DE _ NAVIGATION.R A D A R _ DE _ NAVIGATION. RADIO - DETECTION - AND – RANGING _RADIO - DETECTION - AND – RANGING _ SOLASSOLAS - Installation ARPA / Equipement Chapitre V Règle II J – Dispositions.- Installation ARPA / Equipement Chapitre V Règle II J – Dispositions. RESOLUTION --- A_823(19)RESOLUTION --- A_823(19) :: OBJECTIF DE L’O.M.I. _OBJECTIF DE L’O.M.I. _ Etablir et adopter des règles / directives en mer CC la sécuritéEtablir et adopter des règles / directives en mer CC la sécurité et protection du milieu marin.et protection du milieu marin. DEVISE DE L’OMIDEVISE DE L’OMI __ NAVIGATION PLUS SURE DANS DES OCEANS PLUS PROPRESNAVIGATION PLUS SURE DANS DES OCEANS PLUS PROPRES.. La RègleLa Règle 1919 rappelle l’Obligation pour tous les Bâtiments dotés ou non d’un Radar,rappelle l’Obligation pour tous les Bâtiments dotés ou non d’un Radar, de Naviguer à la Vitesse de Sécuritéde Naviguer à la Vitesse de Sécurité adaptée aux Circonstances existantesadaptée aux Circonstances existantes & aux& aux conditions de visibilités Réduites.conditions de visibilités Réduites. LeLe CPACPA && TCPATCPA «« TIME CLOSEST POINT OF APPROACHTIME CLOSEST POINT OF APPROACH » - le Point et Heure de» - le Point et Heure de Passage à la Distance Minimale.Passage à la Distance Minimale. 2
- 3. Réduit le volume de travailRéduit le volume de travail Donne instantanément une évaluation.Donne instantanément une évaluation. Précise, continue, P. R. C.Précise, continue, P. R. C. PLOTTINGPLOTTING AUTOMATIQUEAUTOMATIQUE __ _ Pointage des positions successives d’une cible, déterminer sa trajectoire, sa direction_ Pointage des positions successives d’une cible, déterminer sa trajectoire, sa direction et sa vitesse,et sa vitesse, CPA - TCPA – DC ACPA - TCPA – DC A. Donc évaluer le risque d’une situation rapprochée. Donc évaluer le risque d’une situation rapprochée ou bien un risque de collision.ou bien un risque de collision. Rapprochement maximalRapprochement maximal -- TCPATCPA. Successif intervalle de temps sur la base de l’échelle.. Successif intervalle de temps sur la base de l’échelle. VitesseVitesse d’approched’approche – écourter le temps – balayage toutes les 2 s. la Cible est– écourter le temps – balayage toutes les 2 s. la Cible est directionnelle à la prochaine rotation d’antenne.directionnelle à la prochaine rotation d’antenne. _ Évaluation des changements de_ Évaluation des changements de ROUTEROUTE et/ou deet/ou de VITESSEVITESSE à effectuer par le Navireà effectuer par le Navire Porteur _Porteur _ OSOS _ pour transformer le_ pour transformer le CPA DangereuxCPA Dangereux enen CPA de SécuritéCPA de Sécurité.. _ Le Plotting suivi des_ Le Plotting suivi des ECHOSECHOS se fait en positionnant unse fait en positionnant un symbolesymbole électroniqueélectronique sur l’échosur l’écho intéressant (petit cercle engendré dans le Radar). Le déplacement de l’écho est alorsintéressant (petit cercle engendré dans le Radar). Le déplacement de l’écho est alors pris en charge par le Calculateur qui commande le déplacement correspondant dupris en charge par le Calculateur qui commande le déplacement correspondant du symbole. Tant que le Navire Observé conserve sa route le Symbole reste autour desymbole. Tant que le Navire Observé conserve sa route le Symbole reste autour de l’écho et le Calculateur élabore le Vecteur route Relative, le CPA et le TCPA. Dés que lel’écho et le Calculateur élabore le Vecteur route Relative, le CPA et le TCPA. Dés que le Navire Observé change de Route, l’écho quitte le Symbole et il y a donc VisualisationNavire Observé change de Route, l’écho quitte le Symbole et il y a donc Visualisation immédiate du changement. Pour recalculer leimmédiate du changement. Pour recalculer le Nouveau CPANouveau CPA, il suffit de repositionner le, il suffit de repositionner le symbole sur l’écho pour permettre une Nouvelle Acquisition par le Calculateur.symbole sur l’écho pour permettre une Nouvelle Acquisition par le Calculateur. •• Nombre de Cibles pouvant être pris en Charge Automatiquement-ManuellementNombre de Cibles pouvant être pris en Charge Automatiquement-Manuellement •• Visualisation ou Non sur l’Indicateur Radar, des Vecteurs Vitesses et des RoutesVisualisation ou Non sur l’Indicateur Radar, des Vecteurs Vitesses et des Routes Relatives et / ou Vraies de N «Relatives et / ou Vraies de N « CiblesCibles » les plus Dangereuses en fonction des» les plus Dangereuses en fonction des données – CPA – TCPA.données – CPA – TCPA. _ Exemple d’équipements Anticollision._ Exemple d’équipements Anticollision. Le RADAR RAYTHEON TM 1660 / 12 avec EBM – Marqueur électronique de Direction,Le RADAR RAYTHEON TM 1660 / 12 avec EBM – Marqueur électronique de Direction, donne une Image qui peut être présentée soitdonne une Image qui peut être présentée soit ;; •• En mouvement Relatif.En mouvement Relatif. •• En mouvement Relatif avec Stabilisation au Nord.En mouvement Relatif avec Stabilisation au Nord. •• En mouvement Vrai avec déplacement limité du Spot du Navire Porteur.En mouvement Vrai avec déplacement limité du Spot du Navire Porteur. •• En mouvement Vrai Complet.En mouvement Vrai Complet. •• En M_V Complet avec déplacement du Spot sur le Gisement 180° - 0°En M_V Complet avec déplacement du Spot sur le Gisement 180° - 0° _ L’origine du Vecteur_ L’origine du Vecteur EBM,EBM, indépendant du Balayage, peut être positionnée en un Pointindépendant du Balayage, peut être positionnée en un Point quelconque de l’écran, grâce à un Manche à Balai. Son Orientation est commandée parquelconque de l’écran, grâce à un Manche à Balai. Son Orientation est commandée par un commutateur Manuel.un commutateur Manuel. Une fois repérée la position Initiale des échos,Une fois repérée la position Initiale des échos, L’EBML’EBM manuel Permet sans aucunmanuel Permet sans aucun Plotting, la détermination desPlotting, la détermination des CPACPA etet TCPATCPA grâce à une Base de temps associée et cellegrâce à une Base de temps associée et celle desdes RoutesRoutes etet vitessesvitesses VraiesVraies etet RelativesRelatives.. _ Il faut_ Il faut 3030 secondes par écho pour déterminer lesecondes par écho pour déterminer le CPACPA –– TCPATCPA––RRVV––VVvv etet RRelativeselatives.. MOUVEMENTS VRAIS ET MOUVEMENTS RELATIFS.MOUVEMENTS VRAIS ET MOUVEMENTS RELATIFS. En présentation RelativeEn présentation Relative, les Risques de collision sont immédiatement évalués, on voit, les Risques de collision sont immédiatement évalués, on voit Clairement lorsque le Danger est Passé.Clairement lorsque le Danger est Passé. En Mouvement VraiEn Mouvement Vrai, on différencie rapidement les Objectifs Fixes des Objectifs Mobiles., on différencie rapidement les Objectifs Fixes des Objectifs Mobiles. Les Images Radar des Objectifs Mobiles se déplacent sur leurs Routes Réelles et leursLes Images Radar des Objectifs Mobiles se déplacent sur leurs Routes Réelles et leurs Vitesses réellesVitesses réelles ; tout changement de Cap est très rapidement détecté, ce qui facilite le; tout changement de Cap est très rapidement détecté, ce qui facilite le Choix de la Manœuvre à faire pour éviter une Situation Rapprochée.Choix de la Manœuvre à faire pour éviter une Situation Rapprochée. UTILITE ARPA A BORD_UTILITE ARPA A BORD_ 3
- 4. •• Réduit le volume de travailRéduit le volume de travail •• Donne instantanément une évaluation.Donne instantanément une évaluation. •• Précise, continue, P. R. C.Précise, continue, P. R. C. •• Facilite l’interprétation des données radar.Facilite l’interprétation des données radar. •• Peut réduire les risques d’abordage et de collision Inconvénients, tombe en panne.Peut réduire les risques d’abordage et de collision Inconvénients, tombe en panne. •• Personne non ou mal formé.Personne non ou mal formé. •• Induit en erreur - répond à des normes de fonctions adéquates.Induit en erreur - répond à des normes de fonctions adéquates. •• L’OMI en collaboration avec CEI / Commission ELECTRO -technique internationale.L’OMI en collaboration avec CEI / Commission ELECTRO -technique internationale. •• L’OMI exige que tous les navires soient construits le 1L’OMI exige que tous les navires soient construits le 1erer janvier 97 – RES. A 823…janvier 97 – RES. A 823… •• Avant le 1Avant le 1erer janvier 97janvier 97 ; A 22 / 11.; A 22 / 11. •• L’OMI exige une formation pour exploiter correctement l’équipement par officiers.L’OMI exige une formation pour exploiter correctement l’équipement par officiers. •• Dans cette formation les officiers doivent savoir les possibilités et les limites deDans cette formation les officiers doivent savoir les possibilités et les limites de l’équipement, connaître les erreurs qu’ils peuvent connaître, FLAG & PORT / STATEl’équipement, connaître les erreurs qu’ils peuvent connaître, FLAG & PORT / STATE CONTROLE _CONTROLE _ Théorie de l’A R P A.Théorie de l’A R P A. __ Le manuel est obligatoire, l’automatique est une option radar – faciliteLe manuel est obligatoire, l’automatique est une option radar – facilite l’interprétation des données – acquisition ARPA – exclu la côte – 0,3’ / Embruns,l’interprétation des données – acquisition ARPA – exclu la côte – 0,3’ / Embruns, retour de mer – cercle minimum acquis.- 3 lignes d’exclusion – détecte 30retour de mer – cercle minimum acquis.- 3 lignes d’exclusion – détecte 30 cibles / TARGETS et choisis les plus dangereux, les plus important – les pluscibles / TARGETS et choisis les plus dangereux, les plus important – les plus proches. Zone / Les 1ères cibles arrivées.proches. Zone / Les 1ères cibles arrivées. LES ELEMENTS DE L’ARPALES ELEMENTS DE L’ARPA :: _ L’image de base doit être bien réglée._ L’image de base doit être bien réglée. _ ARPA ON_ ARPA ON / Long Pulse / Gain 3 H / All Targets - Cancel./ Long Pulse / Gain 3 H / All Targets - Cancel. __ ACQ… MANUEL…. SELECT… VECTEUR V / R…ACQ… MANUEL…. SELECT… VECTEUR V / R… HYSTORY… CANCEL... INFORMATIONSHYSTORY… CANCEL... INFORMATIONS _ TRIAL - SILUMATION_ TRIAL - SILUMATION _ DELAY TIME 00 MN … 5 MN …_ DELAY TIME 00 MN … 5 MN … OU 10 MINUTES --- RETARD SUR L’EXÉCUTIONOU 10 MINUTES --- RETARD SUR L’EXÉCUTION _ ZONE OU GLOBALE_ ZONE OU GLOBALE _ PAD _ PREDING AREA DETECTION_ PAD _ PREDING AREA DETECTION _ BOUTON VERT - VITESSE + CAP_ BOUTON VERT - VITESSE + CAP _ SEFT DRIFT / INJECTER DIRECTION ET VITESSE DU COURANT_ SEFT DRIFT / INJECTER DIRECTION ET VITESSE DU COURANT _ DELAY TIME / QUAND – EST- CE QUE JE REVIENS SUR MA ROUTE INITIALE_ DELAY TIME / QUAND – EST- CE QUE JE REVIENS SUR MA ROUTE INITIALE COMMENT ACCEDER A L’INFORMATION ?COMMENT ACCEDER A L’INFORMATION ? _ 3 Touches –_ 3 Touches – 3 Types d’information3 Types d’information –– VECTEURVECTEUR –– ARPAARPA –– ALARMEALARME.. Eviter de venir su Bd, et tout risque de situation rapprochée entre 6O° et 80°. Si on neEviter de venir su Bd, et tout risque de situation rapprochée entre 6O° et 80°. Si on ne prend pas compte de la durée de la manœuvre, le DCPA change. Un changement deprend pas compte de la durée de la manœuvre, le DCPA change. Un changement de 90°….45°.90°….45°. -- Revenir route initiale.Revenir route initiale. -- Revenir progressivement, petits changements de route.Revenir progressivement, petits changements de route. -- Distance de sécurité supérieure à 2’, On n’accepte aucune cible à l’intérieur.Distance de sécurité supérieure à 2’, On n’accepte aucune cible à l’intérieur. -- Retour au plutôt.Retour au plutôt. -- Routes // jusqu’à ce que le danger soit écarté.Routes // jusqu’à ce que le danger soit écarté. T R I A L.T R I A L. _ Planifier un mouvement, remettre toujours en cause le réglage du radar, calcul des_ Planifier un mouvement, remettre toujours en cause le réglage du radar, calcul des paramètres Cibles –paramètres Cibles – CPA – Gis – Zv.CPA – Gis – Zv. La machine radar est cartésienne. Présentation de l’information – mieux exploiter lesLa machine radar est cartésienne. Présentation de l’information – mieux exploiter les données optimales.données optimales. 4
- 5. TRACKINGTRACKING : Poursuite 20 Cibles jusqu’à 30.: Poursuite 20 Cibles jusqu’à 30. HISTORIQUEHISTORIQUE : Cible dans le passé les 10 dernières minutes, donc 5 positions toutes: Cible dans le passé les 10 dernières minutes, donc 5 positions toutes les 2 minutes. Pour voir si la cible n’a pas changé ni de vitesse ni de route.les 2 minutes. Pour voir si la cible n’a pas changé ni de vitesse ni de route. ALARME DE COLLISIONALARME DE COLLISION :: Régler le C. P. A à 02’… TCPA à 15 minutes, CibleRégler le C. P. A à 02’… TCPA à 15 minutes, Cible dangereuse inf. à 2’, paramètre à afficher 0’,5 et 6 minutes.dangereuse inf. à 2’, paramètre à afficher 0’,5 et 6 minutes. GUARD ZONEGUARD ZONE : à 6’ ALARME, acoustique ou visuelle.: à 6’ ALARME, acoustique ou visuelle. FONCTION RADARFONCTION RADAR : Brillance – gain – 3 heures / Manœuvre urgente: Brillance – gain – 3 heures / Manœuvre urgente ; time = 0; time = 0 Asservie Micro processeur au – GYRO – Locke – GPS / SAT.Asservie Micro processeur au – GYRO – Locke – GPS / SAT. CORRELATIONCORRELATION :: SimulationSimulation…… ButBut : Corrigé ce qui est faux. Les 1ers balayages corolle les faux échos, 2° ou 3° par: Corrigé ce qui est faux. Les 1ers balayages corolle les faux échos, 2° ou 3° par balai, donc suppriment les interférences et faux échos.balai, donc suppriment les interférences et faux échos. To SWEEP, élimination des parasites / T N T.To SWEEP, élimination des parasites / T N T. SCAN to SCAN, retour de mer.SCAN to SCAN, retour de mer. PROCEDURE _ A R P A.PROCEDURE _ A R P A. 1.1. Détection – reconnaissance de la présence d’une cible.Détection – reconnaissance de la présence d’une cible. 2.2. Acquisition (2 Choses.)Acquisition (2 Choses.) 3.3. Sélectionne une cible dangereuse qui demande une poursuite. Appuyer surSélectionne une cible dangereuse qui demande une poursuite. Appuyer sur select. Initier la poursuite.select. Initier la poursuite. 4.4. Poursuite.Poursuite. 5.5. Suivi ou processus d’observation des changements séquentiels des la positionSuivi ou processus d’observation des changements séquentiels des la position de la cible.de la cible. 6.6. Etablir son mouvement.Etablir son mouvement. 7. INFORMATION – ANALYSE – SYNTHESE. 8.8. L’information filtrée est envoyée au DISPLAY.L’information filtrée est envoyée au DISPLAY. Eviter de venir su Bd, et tout risque de situation rapprochée entre 6O° et 80°. Si on neEviter de venir su Bd, et tout risque de situation rapprochée entre 6O° et 80°. Si on ne prend pas compte de la durée de la manœuvre, le DCPA change. Un changement deprend pas compte de la durée de la manœuvre, le DCPA change. Un changement de 90°….45°90°….45° -- Revenir route initiale.Revenir route initiale. -- Revenir progressivement, petit changement de route.Revenir progressivement, petit changement de route. -- Distance de sécurité sup. à 2’Distance de sécurité sup. à 2’ -- On n’accepte aucune cible à l’intérieur.On n’accepte aucune cible à l’intérieur. -- Retour au plutôtRetour au plutôt -- Routes // jusqu’à ce que le danger soit écarté.Routes // jusqu’à ce que le danger soit écarté. RemarqueRemarque : Plusieurs cibles – revenir le plus tard. – Delay time / ARPA.: Plusieurs cibles – revenir le plus tard. – Delay time / ARPA. Les Gouvernement Membres sont invités à veiller _Les Gouvernement Membres sont invités à veiller _ a.a. A ce que leurs méthodes d’homologation des APRA incluent une évaluation de leurA ce que leurs méthodes d’homologation des APRA incluent une évaluation de leur conformité aux Normes Pertinentes de la CEI, et,conformité aux Normes Pertinentes de la CEI, et, b.b. A ce que, le plus rapidement possible et au plus tard le 1A ce que, le plus rapidement possible et au plus tard le 1erer Juillet 1993, les nouvellesJuillet 1993, les nouvelles APRAAPRA qui seront Homologuées utilisent bien les Symboles et les Noms de Commandesqui seront Homologuées utilisent bien les Symboles et les Noms de Commandes de la Norme établie par la CEI.de la Norme établie par la CEI. Lignes limitant la zoneLignes limitant la zone D’acquisition automatiqueD’acquisition automatique.. Acquisition ManuelleAcquisition Manuelle 5
- 6. AcquisitionAcquisition.. Vecteur – Temps afférant au vecteur - Vecteurs Vrais / Relatifs.Vecteur – Temps afférant au vecteur - Vecteurs Vrais / Relatifs. Positions antérieures.Positions antérieures. Cercle de Garde.Cercle de Garde. Point de Passage au plus près.Point de Passage au plus près. Zone de Garde.Zone de Garde. Temps de passage au plus près.Temps de passage au plus près. .. Cible Perdue –Cible Perdue – LOSTLOST TARGETTARGET.. Affichage de données.Affichage de données. SélectionnéeSélectionnée : Affichée.: Affichée. Essai – Solution Connue.Essai – Solution Connue. . XX 6
- 7. XT NORMES DE FONCTIONNEMENT DES AIDES DE POINTAGE RADAR AUTOMATIQUE – APRA. PROJET DE RESOLUTION DE L’ASSEMBLEE. L’ASSEMBLEE. RAPPELANT l’Article « 15 j » de la Convention Portant Création de l’Organisation Maritime Internationale « OMI » qui a trait aux fonctions de l’Assemblée liées à l’Adoption de Règles et de Directives relatives à la Sécurité Maritime. RAPPELANT EGALEMENT les Dispositions de la Règle V/12 de la Convention Internationale de 1974 pour la Sauvegarde De La Vie Humaine en Mer – Convention SOLAS. RAPPELANT EN OUTRE la Résolution A 422 (XI) par laquelle elle a adopté des Normes de Fonctionnement des Aides de Pointage Radar Automatiques. APRA/ARPA RECONNAISSANT que l’Utilisation correcte des aides de pointage Radar Automatiques faciliterait l’Interprétation des Données du Radar et pourrait réduire les Risques d’Abordage et de Pollution du Milieu Marin. RECONNAISSANT EGALEMENT qu’il est nécessaire de refléter les progrès de la technologie dans les Normes de fonctionnement afin d’améliorer le degré de prévention des Abordage en MER. CONSIDERANT que des Aides de Pointage Radar Automatiques qui répondrait à des Normes de fonctionnement inadéquate ou qui seraient utilisées par du Personnel ayant une formation insuffisante, pourraient nuire à la sécurité de la Navigation. AYANT EXAMINE la recommandation faite par le Comité de la Sécurité Maritime à sa (64) soixante – Quatrième Sessions. 1. ADOPTE les Normes de Fonctionnement des Aides de Pointage Automatiques qui figurent en Annexe à la Présente Résolution. 2. INVITE LES GOUVERNEMENTS A FAIRE EN SORTE. a) Que les Aides de Pointage Radar Automatiques installées le 1er Janvier 1997 ou après cette date satisfassent à des Normes de fonctionnement qui ne soient pas inférieures à celles qui figurent en Annexe à la présente Résolution. b) Que les Aides de pointage Radar Automatiques installées avant le 1er Janvier 1977 satisfassent au moins aux Normes de fonctionnement figurant dans la Résolution A 422 (XI) et 7
- 8. c) Qu’une Formation suffisante à l’Emploi correct des Aides de Pointages Radar Automatiques soit instituée afin de Permettre aux Capitaines et aux Officiers de Pont de Comprendre les principes fondamentaux du Fonctionnement des Aides de pointage Radar Automatiques et notamment, leurs possibilités, leurs limites et les erreurs qu’elles peuvent commettre. NORMES DE FONCTIONNEMENT. DES AIDES DE POINTAGE RADAR AUTOMATIQUES – APRA. I. INTRODUCTION. 1. 1 Les Aides de pointage Radar Automatiques (APRA) devrait être pour améliorer le degré de prévention des Abordage en Mer. 1. Alléger le Volume de travail des Observateurs, en leur permettant d’Obtenir Automatiquement des Renseignement sur les Cibles Pointées, de telle sorte qu’ils puissent s’acquitter de leurs tâches aussi efficacement dans le cas de plusieurs cibles distinctes que lorsqu’ils procèdent au Pointage Manuel d’Une Seule Cible. 2. Fournir une Evaluation Continue – Précise – Et Rapide de la Situation. 1. 2 Les Services Radars fournis par un Indicateur d’APRA devraient être conformes aux Normes de Fonctionnement du matériel Radar A 477 (XII) compte – tenu de son Mode d’Utilisation. 1. 3 Les APRA devraient Satisfaire non seulement aux prescriptions générales qui sont énoncées dans la Résolution A 694 (17), mais Egalement aux Normes de fonctionnement minimales ci – après. 2. DEFINITIONS. Les Définitions des termes utilisés dans les présentes Normes de fonctionnement figurent à l’Appendice 1. 3. NORMES DE FONCTIONNEMENT. 3. 1 DETECTION. Lorsqu’il est prévu que les Cibles soient détectées par un moyen autre que l’Observateur du Radar, ce moyen devrait fonctionner de façon à donner des résultats qui ne soient pas inférieurs à ceux qui pourraient être obtenus en consultant l’Image Radar. 3. 2 ACQUISITION. 8
- 9. L’ACQUISITION des Cibles peut se faire manuellement ou Automatiquement pour des vitesses relatives inférieures à 100 Nœuds. Toutefois, il devrait toujours exister un moyen manuel d’acquisition et d’annulation les APRA à acquisition Automatique devraient être dotées d’un moyen qui permette de supprimer l’acquisition dans certaines Zones sur toutes les échelles de portée où l’acquisition est supprimée dans une certaine Zone. La Zone d’Acquisition devrait être définie et indiquée sur l’Image. L’acquisition Automatique ou Manuelle devrait donner des Résultats qui ne soient pas inférieurs à ceux qui pourraient être obtenus en consultant l’Image Radar. 3. 3 POURSUITE. L’APRA devrait permettre de poursuivre, traiter et représenter simultanément au moins 20 Cibles et de Mettre continuellement à jour les renseignements concernant ces Cibles – Que celles ci soient acquises Automatiquement ou Manuellement. S’il est prévu que l’acquisition se fasse Automatiquement, il devrait être fourni à l’utilisateur la description des critères de sélection des cibles à poursuivre. Si l’APRA ne poursuit pas toutes les Cibles qui apparaissent sur l’Image, celles qui le sont devraient être clairement signalées sur l’Ecran par un Symbole approprié. L’APRA devrait continuer à poursuivre une Cible acquise qui apparaît distinctement sur l’Image pendant cinq balayages sur dix consécutifs à condition que la Cible ne soit sujette à permutation. L’APRA devrait être conçue de manière à réduire au minimum les possibilités d’erreurs de poursuite et notamment de permutation des Cibles. Il conviendrait de fournir à l’utilisateur une description qualitative des Effets des Sources d’Erreurs sur la poursuite Automatique et des Erreurs correspondantes et, notamment des Effets résultant du faible rapport Signal / Bruit et du Faible Rapport Signal / Echos parasites consécutifs aux retours de Mer, à la Pluie – A la neige – Aux nuages bas et aux émissions non – synchrones. L’APRA devrait pouvoir faire apparaître sur l’Ecran, sur demande, en le représentant par un Symbole approprié au moins quatre positions également espacées dans le temps de toute Cible poursuivie au cours d’une période en rapport avec l’échelle de portée utilisée. L’Echelle de temps des tracés de positions antérieures devraient être indiquée. Le Manuel d’Exploitation devrait expliquer ce que les tracés de positions antérieures représentent. 9
- 10. 3.4 VISUALISATION. Le dispositif de visualisation peut – être indépendant ou faire partie intégrante du Radar du Navire. Toutefois, toutes les données qui doivent être fournies sur l’image Radar conformément aux Normes de fonctionnement des appareils Radar de Navigation devraient figurer sur le Dispositif de Visualisation de l’APRA. Le Dispositif de Visualisation devrait être conçu de manière que tout mauvais fonctionnement des éléments de l’APRA qui fournissent des données complémentaires à celles que doit fournir le Radar conformément aux Normes de fonctionnement des Appareils Radar de Navigation n’Affecte pas l’intégrité de l’Image Radar de Base. Le Pointage Radar Automatique devrait fonctionner au moins aux échelles de portée 3 – 6 et 12 milles et l’échelle de portée utilisée devrait – être indiquée de façon claire. Le Pointage Radar Automatique peut également être assuré à d’autres échelles de portée autorisées en vertu de la Résolution A 477 (XII), auquel cas il devrait l’être de la manière prévue dans les présentes Normes. L’APRA devrait pouvoir fonctionner en présentation mouvement Relatif Stabilisé en Azimut en Haut et Cap en Haut. En outre l’APRA peut aussi donner une présentation mouvement Vrai si c’est le cas, l’opérateur devrait pouvoir choisir une présentation soit en Mouvement Vrai, soit en mouvement Relatif. Le Mode de présentation et l’Orientation utilisés devraient – être indiqués de façon claire. Les Informations Relatives à la Route et à la Vitesse des Cibles acquises qui sont fournies par l’APRA, devraient être représentées sous forme vectorielle ou graphique et indiquer clairement le dépassement prévu de la Cible par des symboles appropriés – A cet Egard : 1. Les APRA qui présentent des informations sous forme Vectorielle uniquement devraient permettre de choisir entre des Vecteurs de déplacement Relatif. Le Mode Vectoriel choisi devrait être indiqué, et, si le Mode de déplacement Vrai a été sélectionné. Il devrait être précisé si la Stabilisation utilisée est « MER » ou « FOND ». 2. Une APRA qui est capable de présenter la Route et la vitesse d’une cible sous forme graphique devrait également fournir, sur demande, le Vecteur de déplacement Vrai et / ou le Vecteur de déplacement Relatif de la Cible. 3. Le temps de déplacement représenté par les Vecteurs affichés devrait pouvoir être ajusté. 10
- 11. 4. L’Echelle de Temps utilisé pour le Vecteur devrait être indiquée de façon Claire. 5. Si des Cibles Stationnaires sont utilisées comme référence « Fond », ce fait devrait être indiqué en affichant le symbole approprié, dans ce cas, les Vecteurs de déplacement Relatif, y compris ceux des Cibles utilisées comme référence « Fond » devraient être affichés sur demande. Les renseignements fournis par l’APRA ne devraient pas occulter les Cibles Radar. L’observateur Radar l’APRA indépendamment de celle des données fournies par l’APRA, il devrait être possible d’annuler en Trois 03 secondes l’Affichage de données superflues par cette aide. Il conviendrait de prévoir les moyens qui permettent de régler la brillance des données par l’APRA indépendamment de celles des données de celle des données du Radar, et notamment de faire disparaître complètement les données Relatives au Pointage Automatique. La Méthode de présentation devrait être telle que les données fournies par l’APRA puissent être lues clairement, d’une manière générale, par plus d’un Observateur, dans les conditions de luminosité normalement rencontrées sur la passerelle d’un Navire le Jour et la Nuit, il est possible d’installer un écran pour protéger de la lumière du soleil, mais il ne faut diminuer pour autant la possibilité pour l’Observateur d’assurer convenablement la veille, il conviendrait de prévoir des dispositifs permettant de régler la brillance. Il conviendrait de prévoir des moyens qui permettent d’obtenir rapidement la distance et le relèvement de tout objet qui apparaît sur le dispositif de visualisation de l’APRA. Lorsqu’une cible apparaît sur l’image Radar et, dans le cas de l’acquisition automatique, lorsqu’elle pénètre dans la zone d’acquisition choisie par l’observateur ou dans le cas de l’acquisition manuelle. Lorsqu’elle a été acquise par l’Observateur, l’APRA devrait présenter, dans un délai qui ne soit pas supérieur à une minute, une indication du déplacement de la Cible et, dans un délai de trois O3 minutes, le déplacement prévu de la Cible, conformément aux paragraphes précédents. Après avoir changé les échelles de portée sur lesquelles on peut lire les données fournies par l’APRA ou avoir réglé l’image, les informations complètes de pointage devraient être présentées au bout d’un laps de temps correspondant au plus à un balayage. 3. 5 ALARMES DE FONCTIONNEMENT. L’APRA devrait pouvoir alerter l’Observateur par un signal Visuel et Acoustique quand toute cible repérable se rapproche à une certaine distance ou traverse une zone choisie par l’Observateur. 11
- 12. La Cible qui a déclenché l’Alarme devrait être clairement signalée par les symboles appropriés sur le Dispositif de Visualisation. L’APRA devrait pouvoir alerter l’Observateur par un Signal Visuel et Acoustique quand elle prédit qu’une Cible poursuivie se rapprochera à une distance et dans un Laps de temps minimaux choisi par l’Observateur. La Cible qui a déclenché l’Alarme devrait être signalée par les symboles appropriés sur le dispositif de visualisation. L’APRA devrait indiquer clairement si une Cible poursuivie est perdue, sauf dans le cas de cibles hors de portée, et la dernière position de la Cible devrait être clairement indiqué sur le dispositif de visualisation. L’observateur devrait pouvoir déclencher ou arrêter le signal d’alarme sonore. 3. 6 DONNEES REQUISES. L’observateur devrait être en mesure de choisir n’importe quelle Cible poursuivie pour Obtenir des données. Les Cibles sélectionnées devraient être repérées par le symbole approprié sur l’image Radar. S’il est nécessaire de disposer en même temps de données concernant plus d’une Cible, Chaque Symbole devrait être identifié séparément, par exemple par un nombre placé à côté du symbole. Les données ci – après relatives à chaque Cible choisie devraient être identifiées clairement et très nettement et être affichées immédiatement et simultanément sous forme alpha numérique en dehors de la zone Radar. 1. Distance actuelle de la Cible. 2. Relèvement actuel de la Cible. 3. Prévision de la Distance de passage la plus courte de la Cible – CPA. 4. Temps prévu pour arriver au point de rapprochement maximal – TPCA. 5. Route Vraie – Calculée de la Cible. 6. Vitesse Vraie – Calculée De la Cible. La présentation des données mentionnées devrait permettre de savoir si ces modifications sont fournies par rapport à une stabilisation Mer ou Fond. Lorsque des données Relatives à plusieurs Cibles sont présentées, deux au moins des éléments répertoriés au paragraphe 6. 2 devraient être affichés simultanément pour chaque Cible sélectionnée. Si deux apparaissent à la fois pour chaque Cible. 3. 7 MANŒUVRE D’ESSAI. L’APRA devrait Simuler l’Effet que la manœuvre du Navire porteur aurait sur toutes les Cibles poursuivies avec ou sans temps d’attente préalable sans 12
- 13. interrompre le suivi des Cibles et la Visualisation des données alpha numériques Relatives aux Cibles. Le Symbole qui caractérise la simulation devrait apparaître sur l’Ecran. Le Manuel d’Exploitation devrait expliquer les principes qui régissent la technique adoptée pour la manœuvre d’essai, y compris si elle existe, la simulation des caractéristiques de manœuvre du Navire. Il devrait être possible d’Interrompre une manœuvre d’essai à tout moment. 3. 8 PRECISION. L’APRAL’APRA Pour les quatre cas de figure présentés à l’appendice 2. Etant donné lesPour les quatre cas de figure présentés à l’appendice 2. Etant donné les Erreurs des capteurs spécifiés à l’appendice 3.Erreurs des capteurs spécifiés à l’appendice 3. Les chiffres indiqués correspondent aux résultats, les meilleurs que permet d’obtenir le Pointage Manuel dans des conditions d’Environnement de + 10° de Roulis. L’APRA devrait, en cas de poursuite constante d’une Cible, présenter dans un délai maximal d’une minute une indication du mouvement Relatif apparent de la Cible avec les Précisions suivantes à Hauteur de 95%. En cas de poursuite constante d’une Cible, le Navire Porteur et le Navire Cible suivent une Route Rectiligne à une vitesse constante. Les valeurs de probabilité sont identiques au niveau de confiance. Lorsqu’une Cible poursuivie ou le Navire porteur ont terminé une manœuvre, le système devrait présenter, dans un délai maximal d’une minute, une Indication du mouvement apparent de la Cible et dans un délai maximal de trois minutes, le déplacement prévu de la Cible. Dans ce contexte, la manœuvre du Navire Porteur devrait être considérée comme un changement de cap de 45° d’un bord ou de l’Autre opéré en une minute. L’APRA devrait être conçu de telle sorte que lorsque le Navire Porteur évolue dans les conditions les plus favorables quant aux mouvement, les Erreurs imputables à cette aide soient insignifiantes comparées à celles dont sont entachées les données fournies par les Capteurs, pour les Cas de figure figurant à l’appendice 2. 3. 9 RACCORDEMENT A D’AUTRES DISPOSITIFS. L’APRA ne devrait pas dégrader le fonctionnement de tout matériel qui lui fournit des données d’entrée. Le raccordement de l’APRA à un autre dispositif ne devrait pas dégrader le fonctionnement de ce dispositif. Il devrait être satisfait à cette prescription en cas de défaillance, dans la mesure où cela est possible dans la pratique. L’absence de toutes données provenant d’un capteur externe devrait être signalée par l’APRA, laquelle devrait également répéter toutes les Alarmes ou 13
- 14. tous les messages Relatifs à la qualité des données qui lui sont fournies par ses capteurs externes et qui pourraient affecter son fonctionnement. 3. 10 ESSAIS DE FONCTIONNEMENT ET ALARMES. L’APRA devrait, lorsqu’elle est victime d’un mauvais fonctionnement, le signaler de manière appropriée pour permettre à l’Observateur de surveiller le fonctionnement du système. En outre, des programmes d’Essais devraient être mis au point pour permettre d’Evaluer périodiquement le fonctionnement global de l’APRA en comparant les résultats à une solution connue. Les symboles d’Essais devraient s’afficher lorsqu’un programme d’Essais est exécuté. 3. 11 STABILISATION « MER » ET STABILISATION « Fond ». L’APRA devrait pouvoir opérer en Stabilisation « Mer » et « Fond ». Les Lochs et les indicateurs de Vitesse qui fournissent des données d’entrée au matériel d’APRA devraient pouvoir donner la Vitesse du Navire par rapport à l’eau vers l’Avant et vers l’Arrière. Les données d’entrée peuvent être fournies en mode « Stabilisation » par le Loch, par un système électronique de détermination de la position, si la mesure de la vitesse a la précision requise par la Résolution A…19 ou par des Cibles Stationnaires poursuivies. Le type de données d’entrée et de Stabilisation utilisé devrait être indiqué sur l’Ecran. DEFINITION DES TERMES DANS LES NORMESDE FONCTIONNEMENT DES APRA. CIBLE. Tout objet qui est fixe ou qui se déplace et dont la position et le mouvement sont déterminés par des mesures de distance et de relèvement sur le Radar. ROUTE RELATIVE. Sens dans lequel une Cible se déplace par rapport à la position du Navire Porteur exprimé sous forme d’un déplacement angulaire par rapport au Nord. Elle est établie par une série de mesures de la distance et du gisement de la Cible sur le Radar du Navire porteur. VITESSE RELATIVE. Vitesse d’une Cible par rapport à la position du Navire Porteur. Elle est réduite d’une série de mesures de la distance et du gisement de la Cible sur le 14
- 15. Radar du Navire Porteur. DEPLACEMENT RELATIF. Combinaison de la Route Relative et de la Vitesse Relative. ROUTE VRAIE. Direction Véritable du mouvement d’une Cible exprimée sous forme d’un déplacement angulaire par rapport au Nord. Elle est obtenue par la combinaison Vectorielle du déplacement Relatif de la Cible et du Déplacement Vrai du Navire Porteur. Il n’est pas nécessaire d’établir une distinction entre la Stabilisation Mer et la Stabilisation Nord. VITESSE VRAIE. Vitesse d’une Cible Obtenue par la combinaison vectorielle de son déplacement Relatif et du déplacement Vrai du Navire Porteur. MOUVEMENT VRAI. Combinaison de la Route Vraie et de la Vitesse Vraie. RELEVEMENT VRAI. Direction d’une Cible par Rapport au Navire Porteur ou à une autre Cible exprimée sous Forme d’un déplacement Angulaire par rapport au Nord. GISEMENT RELATIF. Direction d’une Cible par rapport au Navire Porteur exprimée sous forme d’un déplacement Angulaire par rapport au Cap du Navire. PRESENTATION EN MOUVEMENT VRAI. Dans cette présentation, le Navire Porteur et chaque Cible évoluent conformément à Leur déplacement Vrai. PRESENTATION EN MOUVEMENT RELATIF. Dans cette présentation, la position du Navire Porteur reste fixe et toutes les Cibles se déplacent par rapport au Navire. PRESENTATION STABILISEE EN AZIMUT. Dans cette présentation, l’Orientation en Azimut par rapport à un relèvement Vrai donné est Fixe. PRESENTATION NORD EN HAUT. Présentation stabilisée en Azimut dans laquelle une ligne reliant le Centre au Sommet de l’écran indique un relèvement Vrai au Nord. PRESENTATION CAP EN HAUT. Présentation stabilisée en Azimut dans laquelle un ligne reliant le Centre au Sommet de l’Ecran indique le Cap prévu du Navire Porteur. 15
- 16. CAP. Direction exprimée en distance angulaire par rapport au Nord vers laquelle est orientée l’Etrave du Navire. PRESENTATION DU DEPLACEMENT D’UNE CIBLE. Prédiction du déplacement futur d’une Cible fondée sur une extrapolation linéaire de son déplacement présent déterminé par des mesures passées de sa distance et de son déplacement sur le Radar. VECTEUR DE DEPLACEMENT RELATIF. Prédiction du déplacement d’une Cible par rapport au Navire Porteur. VECTEUR DE DEPLACEMENT VRAI. Prédiction du Vrai Déplacement d’une Cible en fonction des données d’entrée Relatives à la direction et à la vitesse du Navire Porteur. Le vecteur de déplacement Vrai peut – être présenté par Rapport soit à l’eau soit au Fond. ACQUISITION. Choix d’une ou plusieurs Cibles afin d’en déclencher la poursuite. POURSUITE. Processus d’observation informatique des changements de position successifs d’une Cible pour Obtenir son déplacement. PERMUTATION D’UNE CIBLE. Situation dans laquelle les données Radar entrées pour une Cible poursuivie deviennent associées, par erreur, à une Cible Poursuivie ou à un Echo de Radar non poursuivi. ZONE D’ACQUISITION. Zone créée par l’Observateur dans laquelle une Cible devrait être acquise automatiquement lorsqu’elle pénètre à l’intérieur. HISTORIQUE. Positions antérieures pour des intervalles de temps égaux d’une Cible en cours de poursuite. L’historique peut être Relatif ou Vrai. TRACES. Trajectoires des Echos Radar des Cibles produites par une Rémanence synthétique. Les traces peuvent – être soit Relatives soit Vraies. Les traces Vraies peuvent – être stabilisées « Mer » ou « Fond ». RECALAGE PAR RAPPORT A UN ECHO. Moyen permettant d’indiquer qu’une marque de Navigation fixe donnée qui est poursuivie doit – être utilisée comme référence de stabilisation Fond. MANŒUVRE VRAIE. 16
- 17. Moyen permettant d’aider l’Observateur à faire la bonne manœuvre aux fins de la Navigation et de la prévention des Abordages. ZONES SUPPRIMEES. Zones créées par l’Observateur à l’intérieur de laquelle les Cibles ne sont pas acquises. E R B I. Alidade électronique permettant de mesurer les relèvement et / ou les distances. CPA - TCPA. Limite correspondant au point de rapprochement maximal et au temps prévu pour arriver au point de rapprochement maximal telle que définie par l’Observateur dont le franchissement par une ou plusieurs Cibles poursuivies évoluant en direction du Navire Porteur est signalé par un avertissement. PREVISION DE PASSAGE SUR L’ECRAN. Situation associée à une Cible qui traverse ou qui devrait traverser à l’avant du Navire. ECHO FAIBLE. Expression associée à une Cible poursuivie qui semble avoir été perdue temporairement ou qui a un aspect mal défini au point d’en rendre la poursuite impossible. CIBLE PERDUE. Expression associée à une Cible qui n’est plus poursuivie car elle a été perdue ou masquée. STABILISATION MER. Mode de présentation dans lequel le Navire Porteur et toutes les Cibles sont représentées par rapport à la Mer en utilisant les données fournies par le gyrocompas sur le Cap et celles fournies par le Loch à un seul axe sur la vitesse Surface. STABILISDATION FOND. Mode de présentation dans lequel le Navire Porteur et l’ensemble des Cibles sont représentés par rapport au Fond en utilisant les données relatives à la Route Fond ou des données sur la direction du courant et le déplace. POINTS D’ABORDAGE PREVISIBLES. Représentation graphique de l’endroit ou les points inter - cardinaux d’Abordage se trouve par rapport au Navire Porteur et aux autres Cibles. ZONES DE DANGERS PREVISIONNELLES. 17
- 18. Zone de danger prévisionnel défini autour d’une zone prévisible de situation rapprochée. Les dimensions sont déterminées par les rapports Vitesse entre le Navire Porteur et la Cible en question et les distances limites du point de rapprochement maximal telles que l’Observateur les a définies. LIGNES DES CARTES. Moyen de Navigation par lequel l’Observateur peut définir les lignes afin d’indiquer les chenaux ou les dispositifs du trafic. Quelque fois dénommées lignes de Navigation, ces Lignes exigent une Stabilisation Fond pour les empêcher de dériver. NOTE. La distance, le Gisement, la Route Relative, la Vitesse Relative, le PointLa distance, le Gisement, la Route Relative, la Vitesse Relative, le Point de Rapprochement maximal «de Rapprochement maximal « CPACPA » d’une Cible ou le temps qu’elle mettrait pour» d’une Cible ou le temps qu’elle mettrait pour atteindre le Point de Rapprochement maximal «atteindre le Point de Rapprochement maximal « TCPATCPA » auxquels il est fait» auxquels il est fait référence sont mesurés à partir deréférence sont mesurés à partir de l’Antenne Radarl’Antenne Radar.. ERREURS DES CAPTEURS. Les chiffres indiquant la précision requise qui sont cités au paragraphe 3. 8 des présentes Normes ont été établis à partir des Erreurs de Capteurs suivantes et s’appliquent à tout équipement répondant aux Normes de fonctionnement du matériel de Navigation de Bord. RADAR. ECLAT DE LA CIBLE – Scintillation pour Une Cible de 200 mètres de longueur. 18