
Recommandé
Contenu connexe
Tendances
Tendances (20)
En vedette
Similaire à Jads1
Similaire à Jads1 (20)
Jads1
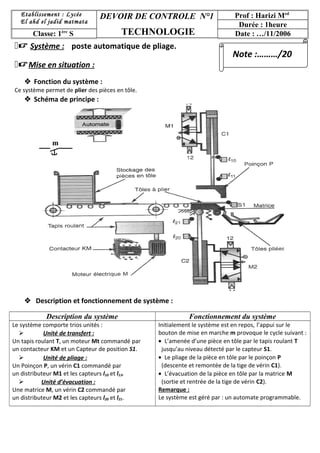
- 1. Etablissement : Lycée El ahd el jadid matmata DEVOIR DE CONTROLE N°1 Classe: 1ère S TECHNOLOGIE Système : poste automatique de pliage. Mise en situation : Prof : Harizi Med Durée : 1heure Date : …/11/2006 Note :………/20 Fonction du système : Ce système permet de plier des pièces en tôle. Schéma de principe : m Description et fonctionnement de système : Description du système Le système comporte trios unités : Unité de transfert : Un tapis roulant T, un moteur Mt commandé par un contacteur KM et un Capteur de position S1. Unité de pliage : Un Poinçon P, un vérin C1 commandé par un distributeur M1 et les capteurs l10 et l11. Unité d’évacuation : Une matrice M, un vérin C2 commandé par un distributeur M2 et les capteurs l20 et l21. Fonctionnement du système Initialement le système est en repos, l’appui sur le bouton de mise en marche m provoque le cycle suivant : • L’amenée d’une pièce en tôle par le tapis roulant T jusqu’au niveau détecté par le capteur S1. • Le pliage de la pièce en tôle par le poinçon P (descente et remontée de la tige de vérin C1). • L’évacuation de la pièce en tôle par la matrice M (sortie et rentrée de la tige de vérin C2). Remarque : Le système est géré par : un automate programmable.
- 2. Travail demandé : Après lecture du dossier technique du système on vous demande de : Représentation fonctionnelle :(08 pt) Définir la frontière d’étude du système : (01 pt). a. Opérateur Boite et couvercle non serties Energies électrique Poste de sertissage des boites de tomate Bruit Automate programmable Boite et couvercle serties Identifier la matière d’œuvre entrante (MOE) et la matière d’œuvre sortante (MOS) de ce système. (01 pts). -MOE :………………………………………………………………………………………….......................................................................... -MOS :…………………………………………………………………………………………………………………………………………………………… Indiquer le type de la matière d’œuvre en cochant (X) la case correspondante : (0,5 pt). Matérielle Energétique Informationnelle Préciser la valeur ajoutée (VA) apportée par le système à la matière d’œuvre. (0,5 pt). -VA :................................................................................................................................................................ Compléter le modèle fonctionnel A-O de ce système : (05 pts). ….…………………………… …………..……………… …………………… ..................... ………………………………………… ........................... ......................... ………………………………………. ………………………………. ……………………………… ................. ................ A-O b. Structure fonctionnelle :(12 pts). ……………………………………………………………………………… Identifier les éléments de ce système. (05pts). La partie commande La Partie opérative actionneurs effecteurs Les éléments d’interfaces préactionneurs capteurs
- 3. ……………………....... ………………………... ………………………... ………………………... ………………………... ……………….. ……………….. ……………….. ……………….. ……………… ……………….. ……………….. ……………….. ……………….. ……………….. ………………….. ………………….. ………………….. ………………….. ………………….. ………………. ………………. ………………. ………………. ……………… Compléter les modèles fonctionnels suivants :(1.5 pt). ……………………… ……………………… ……………………… ……………………… Page 2/3 ……………………… ……………………… Moteur M …………………… …. ……………………… ……………………… ……………………… ……………………… ……………………… ……………………… Tete de sertissage Tête de sertissage En se référant aux questions précédentes, compléter la chaîne fonctionnelle de ce système : utiliser les symboles des composants. (5.5 pts). ……………… ……………… ……… ……… ……… …… …… ……… ……… ……….. …………. ………… …r ………………… …………………. …………… …………… ……………. . ………………… …………………. …….. ………….. …… ….. …… …… …… ……. SYSTEME ……………… ………………
- 4. Page 3/3