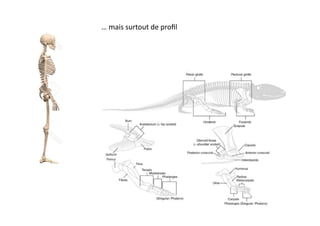
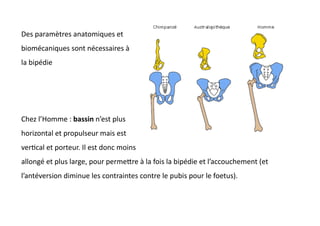
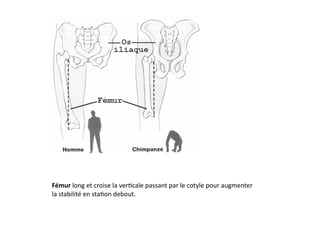
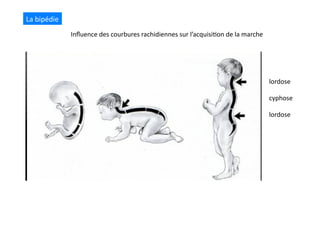
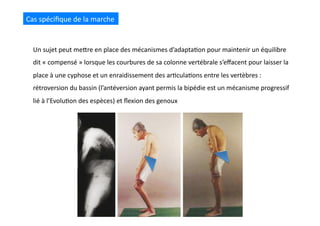
La locomotion humaine, influencée par l'évolution, implique un ensemble de mouvements coordonnés via le système musculo-squelettique et nerveux, permettant l'adaptation à l'environnement. La bipédie est le résultat d'adaptations anatomiques, telles que la position vertébrale et la structure du bassin, tout en permettant aux humains de marcher, courir et s'adapter à diverses situations. Les avancées technologiques et la compréhension biomécanique contribuent à la recherche et à l'amélioration des performances de locomotion.