Le rapport de projet de l'année 2016/2017 à l'IUT de Longwy, dirigé par M. Michel Zasadzinski, concerne l'étude et l'application de la régulation automatique à l'aide de régulateurs PID. Les participants, Mohammed Boujida et Ayoub Chrifi El Idrissi, ont exploré différentes méthodes d'identification du procédé, y compris les méthodes de Broïda et de Ziegler-Nichols, pour optimiser les performances des systèmes régulés. Le document comprend également une gestion du projet et des remerciements à l'équipe pédagogique.















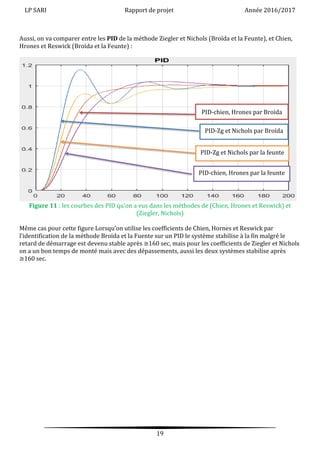

















![LP SARI Rapport de projet Année 2016/2017
38
Annexes
clear
close all
format short g
clc
% load syst_1
% A = A_1; B = B_1; C = C_1; D = D_1;
load syst_2
A = A_2; B = B_2; C = C_2; D = D_2;
%
% load syst_3
% A = A_3; B = B_3; C = C_3; D = D_3;
% load syst_4
% A = A_4; B = B_4; C = C_4; D = D_4;
delete PID_data.m
diary('PID_data.m')
disp('%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%')
disp('saturation de la commande')
disp('sat_m <= u <= sat_M')
sat_M = 1e6
sat_m = -1e6
disp('%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%')
disp(' ')
disp('%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%')
disp('reference --> echelon avec une amplitude
ref')
ref = 1
% disp('%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%')
% %disp(' ')
%
% disp('%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%')
disp('reference --> instant de declenchement
de la reference en echelon --> step time')
tr = 0.1
disp('%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%')
disp(' ')
disp('%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%')
disp('incertitudes dans les parametres du
systeme')
disp('0 <= alp_mod <= 0.2')
alp_mod = 0 % 0.2
disp('%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%')
disp(' ')
disp('%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%')
disp('pertubation --> creneau avec une
amplitude alp_pert')
disp('0 <= alp_pert <= 1')
disp('pertubation --> creneau avec une periode
T_pert')
disp('pertubation --> creneau avec une largeur
des impulsions (duty cycle) PW_pert en
pourcentage')
disp('0 < PW_pert < 1')
disp('pertubation --> creneau avec un instant
inital (phase delay) tau_pert')
alp_pert = 0 % 0.5
T_pert = 200
PW_pert = 15
tau_pert = 40
% pulse generator, periode, duty cycle,
start time (ou retard)
disp('%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%')
disp(' ')
disp('%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%')
disp('intensite du bruit de mesure')
disp('0 <= alp_bruit <= 1')
alp_bruit = 0 % 0.0025 % 0.01
disp('%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%')
disp(' ')
disp('%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%')
disp('Modele du 1er ordre retarde')
disp('G(s) = K*expwhos(-tau*s)/(T*S + 1)')
disp('%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%')
disp(' ')
disp('%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%')
disp('G1(s) = K1*epx(-tau21&*s)/(T1*s + 1)')
disp('%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%')
K1 = 0
T1 = 0
tau1 = 0
disp('%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%')
disp('G2(s) = K2*epx(-tau2*s)/(T2*s + 1)')
disp('%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%')
K2 = 0
T2 = 0
tau2 = 0
disp('%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%')
disp('G3(s) = K3*epx(-tau3*s)/(T3*s + 1)')
disp('%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%')
K3 = 0
T3 = 0
tau3 = 0
disp('%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%')
disp(' ')
sim('modelisations')
nn = length(tm)
K1 = ym(nn)/rm(nn)
[aa,bb] = min(abs(ym - 0.28*ym(nn)))
[cc,dd] = min(abs(ym - 0.4*ym(nn)))
aaa = aa/0.28*ym(nn)
ccc = cc/0.4*ym(nn)
tb1_1 = tm(bb)
tb2_1 = tm(dd)
T1 = 5.5*(tb2_1 - tb1_1)
tau1 = 2.8*tb1_1 - 1.8*tb2_1
K2 = ym(nn)/rm(nn)
[aa2,bb2] = min(abs(ym - 0.27*ym(nn)))
[cc2,dd2] = min(abs(ym - 0.73*ym(nn)))
aaa2 = aa2/0.27*ym(nn)
ccc2 = cc2/0.73*ym(nn)
tf1_2 = tm(bb2)
tf2_2 = tm(dd2)
T2 = (tf2_2 - tf1_2)
tau2 = 1.31*tf1_2 - 0.31*tf2_2](https://image.slidesharecdn.com/rapportdeprojetcommandeparpid-171031190612/85/Rapport-de-projet-commande-par-pid-38-320.jpg)