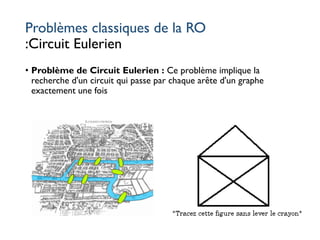
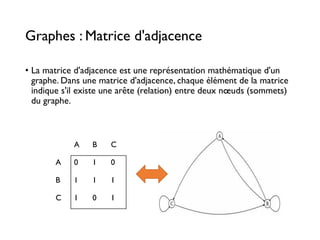
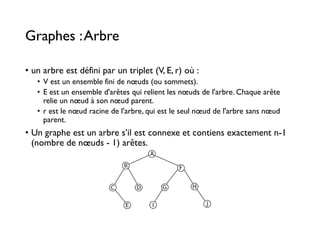
Le document porte sur la complexité algorithmique et les problèmes classiques de la recherche opérationnelle, notamment le problème du voyageur de commerce, le problème du sac à dos et d'autres problèmes d'optimisation combinatoire. Il explique les différentes classes de complexité algorithmique (comme O(1), O(n), O(n^2), etc.) et présente des concepts de graphes, y compris les algorithmes de parcours (BFS et DFS) et la structure des arbres. Le contenu met également en avant des notations mathématiques pour modéliser ces problèmes.
![Graphes :Algorithmes de Parcours de
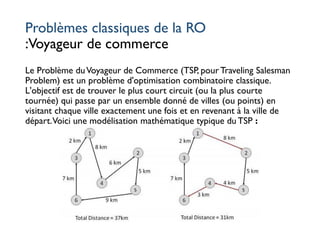
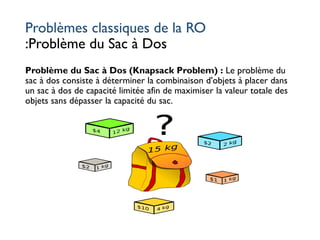
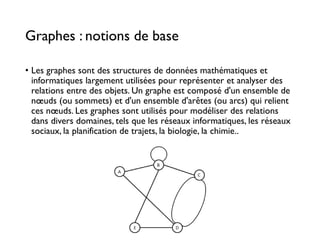
Graphes
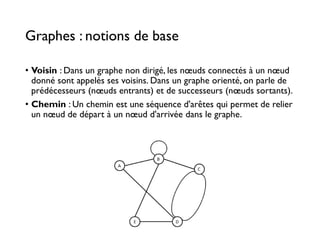
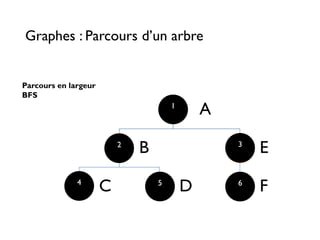
• Parcours en Largeur (BFS, Breadth-First Search)) :Le parcours en largeur commence par
un nœud de départ (souvent appelé nœud source) et explore tous les nœuds voisins de ce
nœud avant de passer aux voisins de ces voisins, et ainsi de suite
Fonction BFS(graphe, noeudDepart):
Créer une file vide Q
Créer un ensemble visited pour suivre les nœuds visités
Enfiler noeudDepart dans Q
Ajouter noeudDepart à l'ensemble visited
Tant que Q n'est pas vide:
courant = Défiler de Q
[Traiter le nœud courant]
Pour chaque voisin dans graphe[courant]:
Si le voisin n'est pas dans visited:
Enfiler le voisin dans Q
Ajouter le voisin à l'ensemble visited](https://image.slidesharecdn.com/ro-2-3-231023105019-9f5e9f2f/85/RO-2-3-pdf-21-320.jpg)
![Graphes :Algorithmes de Parcours de
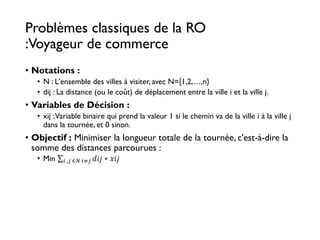
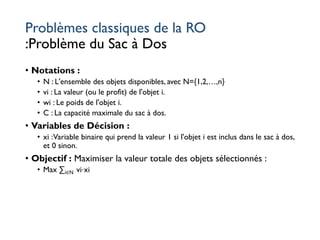
Graphes
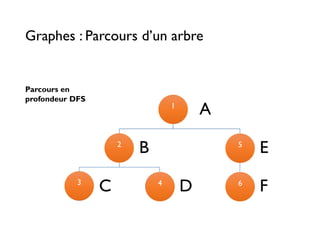
• Le parcours en profondeur (DFS, Depth-First Search) commence également par un
nœud de départ, mais il explore autant en profondeur que possible le long d'une branche
avant de revenir en arrière pour explorer d'autres branches :
Fonction DFS(graphe, noeudDepart):
Créer une pile vide S
Créer un ensemble visited pour suivre les nœuds visités
Empiler noeudDepart sur S
Tant que S n'est pas vide:
courant = Dépiler de S
[Traiter le noeud courant]
Si le courant n'a pas été visité:
Marquer courant comme visité
Pour chaque voisin dans graphe[courant]:
Si le voisin n'a pas été visité:
Empiler le voisin sur S](https://image.slidesharecdn.com/ro-2-3-231023105019-9f5e9f2f/85/RO-2-3-pdf-22-320.jpg)



























![TG-Lasse9[1].pdf](https://cdn.slidesharecdn.com/ss_thumbnails/tg-lasse91-230417224401-59f0dfeb-thumbnail.jpg?width=640&height=640&fit=bounds)


















