Télécharger pour lire hors ligne


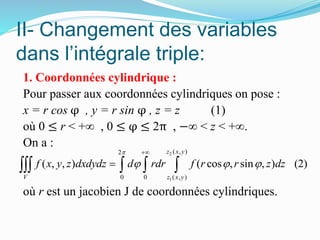
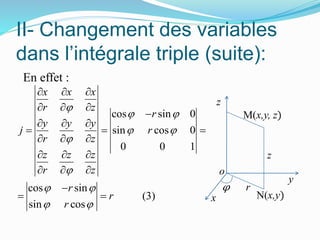
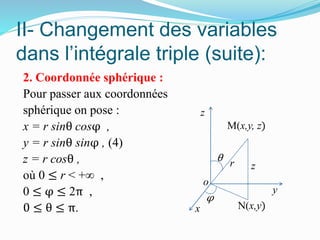
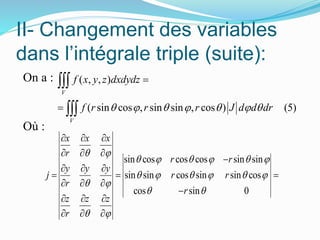
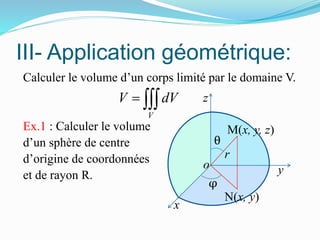
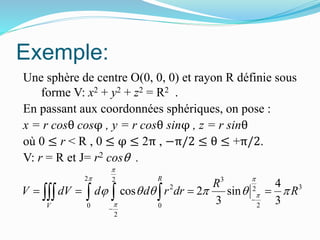
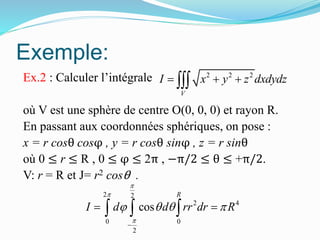
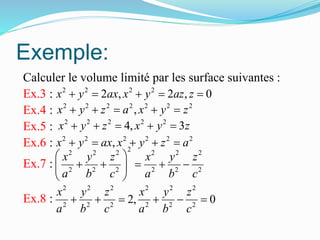

Le document traite de l'intégrale triple dans un espace tridimensionnel, en introduisant des concepts essentiels tels que la somme de Riemann tridimensionnelle et en expliquant les changements de variables vers des coordonnées cylindriques et sphériques. Il propose également des applications géométriques, comme le calcul du volume d'un corps délimité, par exemple d'une sphère. Plusieurs exemples illustrent les concepts mathématiques abordés.


































































