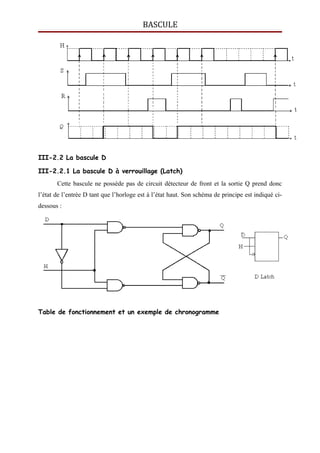
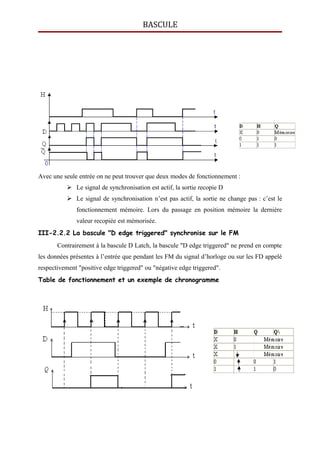
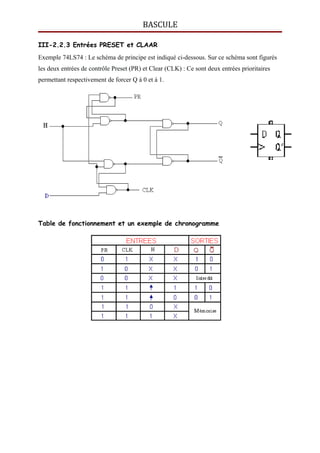
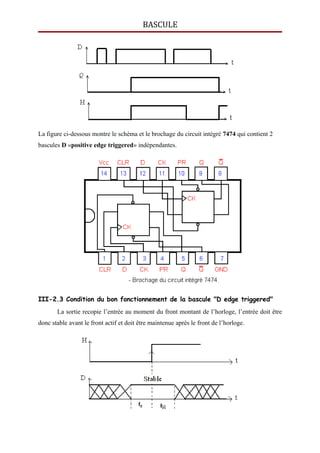
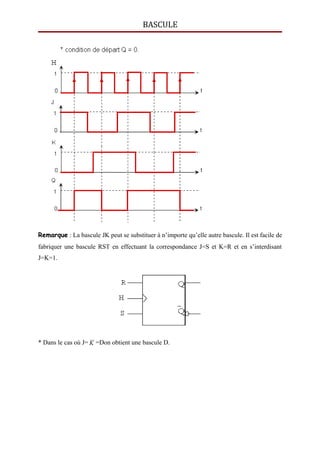
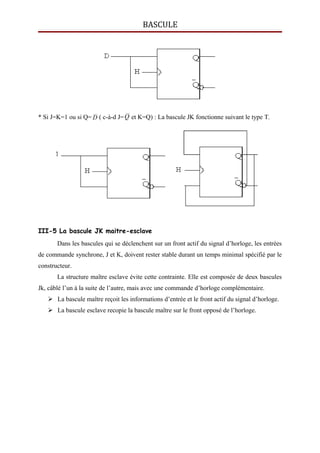
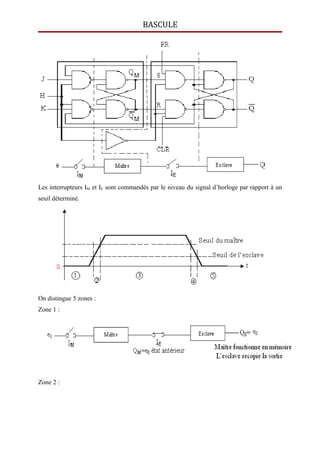
Le document traite de la commande d'un moteur électrique à l'aide de bascules dans des systèmes combinatoires et séquentiels. Il explique les différences entre les deux types de systèmes, la fonctionnalité des bascules asynchrones et synchrones, notamment les bascules RS, D et JK, ainsi que leurs conditions de fonctionnement. Le document fournit également des tables de vérité et des chronogrammes pour illustrer le fonctionnement de ces bascules en relation avec des entrées et des horloges.