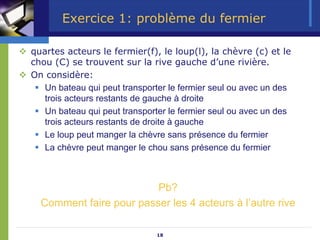
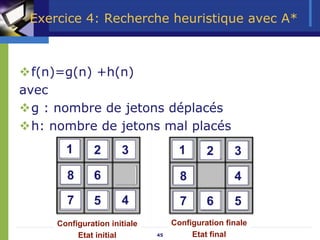
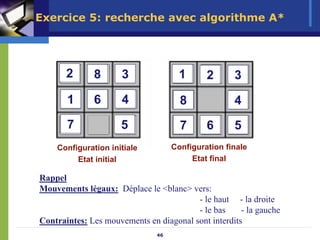
Ce document aborde la résolution de problèmes en intelligence artificielle par la recherche, en présentant les concepts de décomposition des problèmes en sous-problèmes et leurs représentations sous forme de graphes. Il discute également des différents types de problèmes, des méthodes de recherche, ainsi que des algorithmes tels que la recherche en largeur, en profondeur et les méthodes heuristiques comme A*. Enfin, il propose des exercices pratiques pour appliquer ces concepts dans des situations concrètes.