Télécharger en tant que PDF, PPTX


![Représentation graphique
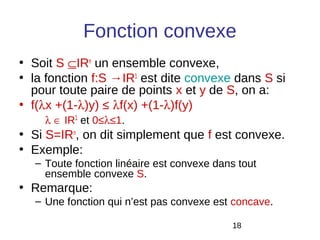
• Intuitivement, une
fonction convexe
admet l’allure
suivante:
• Ici c:[0,1]⊆IR→IR
• La condition de
convexité implique
que graphiquement
tjs la « corde» se
situe au dessus de la
fonction.
19](https://image.slidesharecdn.com/oc1-2013-121128130235-phpapp02/85/Oc1-2013-19-320.jpg)
![• Exemple:
• Une classe importante
des problèmes • La fonction c(x) définit
d’optimisations concerne sur [0,1] est convexe
la minimisation de et admet plusieurs
fonctions convexes sur optimima locaux mais
des ensembles convexes tous globaux
• Dans de tels problèmes :
optimum local
=
optimum global.
20](https://image.slidesharecdn.com/oc1-2013-121128130235-phpapp02/85/Oc1-2013-20-320.jpg)


Le document traite des problèmes de décision et d'optimisation en informatique décisionnelle, en présentant des exemples tels que le problème SAT et le problème du voyageur de commerce. Il explore la complexité de ces problèmes, ainsi que les concepts de convexité et de programmation linéaire. Des applications pratiques dans divers domaines tels que l'allocation de fréquences et la gestion du trafic sont également mentionnées.



































































