Le document présente des méthodes numériques pour résoudre des systèmes couplés fluide-structure, avec un accent sur le code_saturne et le code_aster. Il aborde la modélisation des équations de conservation ainsi que des exemples de simulations de mouvements vibratoires sous écoulement. Les conclusions mettent en évidence les défis et perspectives pour le développement de modèles plus performants et adaptés aux applications réelles.
![Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
Equations d’interface
Condition cinématique
∂ξ
˜ ˜
UR U(x ) = D ˜
(X , t) Γfs = Ωf ∩ Ωs
∂t
Condition dynamique
2 ˜
˜ ˜
CY [−p(x )1 + ˜ ˜ ˜ ˜
d(x )].n(x ) = σ(x ).n(x ) Γfs = Ωf ∩ Ωs
RE
avec CY = MUR 2
Couplage interfacial
˜
x = x = X + Dξ](https://image.slidesharecdn.com/11jus20101123saturneastersalome-110512125921-phpapp02/85/11-jus-20101123_saturneastersalome-4-320.jpg)
![Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
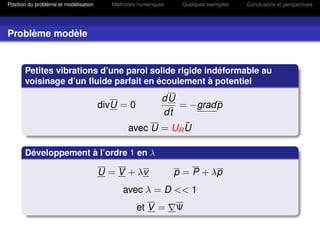
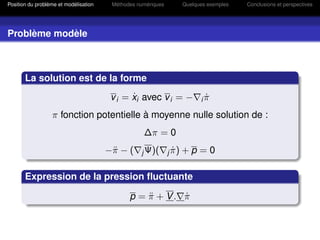
Problème modèle
Equations linéarisées
ivi =0
∂v i
+ j (V i v j + Vjvi) + ip =0
∂t
Après développement
ivi =0
∂v i
+ i [v j ( j Ψ)] +( j Ψ)[ jvi − vj] + ip =0
∂t](https://image.slidesharecdn.com/11jus20101123saturneastersalome-110512125921-phpapp02/85/11-jus-20101123_saturneastersalome-6-320.jpg)

![Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
Condition à la paroi vibrante
Ordre 0
V .n = 0 sur Σ
Ordre 1
[(V + v ).n ]|Σ =
V (M).n + V (M).(n − n) + [V (M ) − V (M)].n + (v .n)|Σ
D’où
˙
v .n|Σ = x s .n + V (M). Σ (x s .n) + (divΣ V )(x s .n)
∂π
˙
˙
= −x s .n − (divΣ V )x s .n − V . Σ (x s .n)
∂n |Σ](https://image.slidesharecdn.com/11jus20101123saturneastersalome-110512125921-phpapp02/85/11-jus-20101123_saturneastersalome-9-320.jpg)
![Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
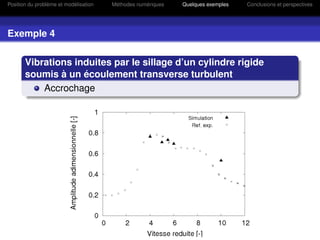
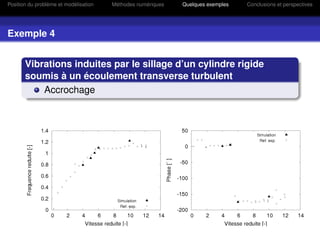
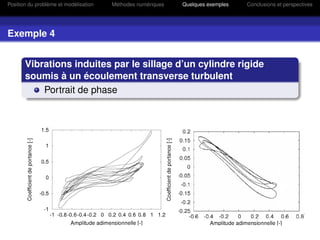
Effet du fluide en écoulement sur les mouvements de la structure
Soit une base de modes propres (sans fluide) Xi (r )
x s = Σai (t)X i (r )
Expression de la pression fluctuante
xfi = − iπ p = π + V. π
¨ ˙
∂π
˙
= x s˙.n − (div V )x s .n − V . (x s .n)
∂n
implique p(r , t) = Σ[aj Φ1 (r ) + aj Φ2 (r ) + aj φ3 (r )]
¨ j ˙ j j
Matrice de couplage
¨ ˙ 2
F = −[mij ]A + [mij ]V A + ([mij ]Vo + [mij ]P)A](https://image.slidesharecdn.com/11jus20101123saturneastersalome-110512125921-phpapp02/85/11-jus-20101123_saturneastersalome-10-320.jpg)
![Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
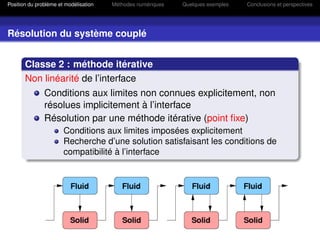
Résolution du système couplé
Problème modèle
¨ ˙ 2
F = −[mij ]A + [mij ]V A + ([mij ]V + [mij ]P)A
˙
Termes de composition de vitesse V A engendrant un
amortissement (positif ou négatif)
2
Termes quasi-statiques V A et PA
Classe 1 : développement en petites perturbations
Relation linéaire entre cinématique et distribution de
contrainte à l’interface
Cas linéaire : résolution d’un problème aux valeurs propres
Combinaison avec une méthode de superposition
Cas non linéaire : introduction de corrélations empiriques](https://image.slidesharecdn.com/11jus20101123saturneastersalome-110512125921-phpapp02/85/11-jus-20101123_saturneastersalome-11-320.jpg)
![Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
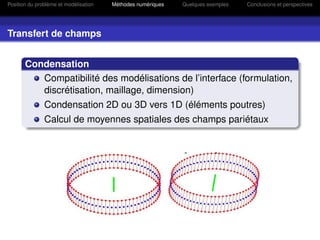
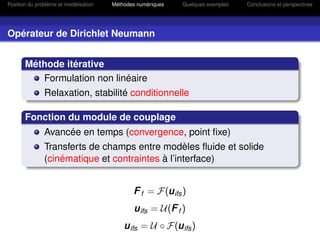
Transfert de champs
Méthode de projection
Poids résiduels, interpolations
Interfaces non conformes
ns nf
u [f ,j] = Πij u [s,i] Ξs,i = Ξf ,j Πij
i=1 j=1](https://image.slidesharecdn.com/11jus20101123saturneastersalome-110512125921-phpapp02/85/11-jus-20101123_saturneastersalome-22-320.jpg)