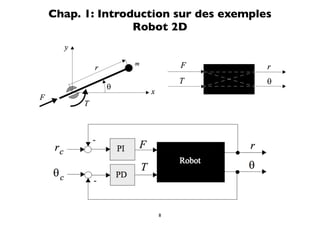
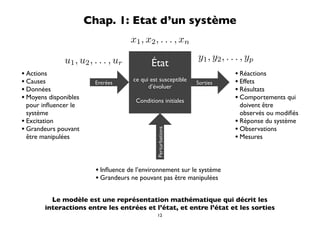
Le document traite de la coordination de systèmes multivariables et des dispositifs dynamiques distribués, abordant des sujets tels que la représentation d'état, la linéarisation, la discrétisation et la commande d'état. Il présente un syllabus détaillé des cours avec des études de cas et des méthodes d'analyse, y compris des exemples pratiques comme l'entraînement électrique et le pendule inversé. Les concepts clés incluent la modélisation, l'observation d'état et l'optimisation de la commande.
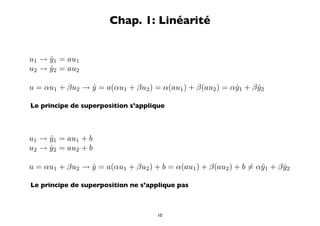
![Chap. 1: Linéarité
Additivité f (x + y) = f (x) + f (y)
+ Homogénéité f (αx) = αf (x)
Principe de
superposition
f (αx + βy) = αf (x) + βf (y)
Comportement proportionnel
˙
y(t) ˙
y(t)
u(t) u(t)
y(t) = f [u(t), t] = au(t)
˙ y(t) = f [u(t), t] = au(t) + b
˙
9](https://image.slidesharecdn.com/aslides11-110918161403-phpapp02/85/A-slides-11-9-320.jpg)

![Systèmes analogiques non linéaires
Nonlinear continuous time systems
x1 (t) = f1 [x1 (t) , . . . , xn (t) , u1 (t) , . . . ur (t) , t]
˙ x1 (t)
˙
x2 (t) = f2 [x1 (t) , . . . , xn (t) , u1 (t) , . . . ur (t) , t]
˙
x2 (t)
˙
.
. x (t) =
˙ .
. .
.
xn (t) = fn [x1 (t) , . . . , xn (t) , u1 (t) , . . . ur (t) , t]
˙ xn (t)
˙
y1 (t) = g1 [x1 (t) , . . . , xn (t) , u1 (t) , . . . ur (t) , t] y1 (t)
y2 (t) = g2 [x1 (t) , . . . , xn (t) , u1 (t) , . . . ur (t) , t] y2 (t)
.
. y (t) = .
. .
.
yp (t) = gp [x1 (t) , . . . , xn (t) , u1 (t) , . . . ur (t) , t] yp (t)
x1 (t) u1 (t) f1 [x (t) , u (t) , t]
x2 (t) u2 (t) f2 [x (t) , u (t) , t]
x (t) = . u (t) = . f [x (t) , u (t) , t] = .
.
. .
. .
.
xn (t) ur (t) fn [x (t) , u (t) , t]
16](https://image.slidesharecdn.com/aslides11-110918161403-phpapp02/85/A-slides-11-16-320.jpg)
![Systèmes analogiques non linéaires
Nonlinear continuous time systems
x1 (t) = f1 [x1 (t) , . . . , xn (t) , u1 (t) , . . . ur (t) , t]
˙
x2 (t) = f2 [x1 (t) , . . . , xn (t) , u1 (t) , . . . ur (t) , t]
˙
.
.
.
xn (t) = fn [x1 (t) , . . . , xn (t) , u1 (t) , . . . ur (t) , t]
˙
y1 (t) = g1 [x1 (t) , . . . , xn (t) , u1 (t) , . . . ur (t) , t]
y2 (t) = g2 [x1 (t) , . . . , xn (t) , u1 (t) , . . . ur (t) , t]
.
.
.
yp (t) = gp [x1 (t) , . . . , xn (t) , u1 (t) , . . . ur (t) , t]
x(t) = f [x(t), u(t), t]
˙
y(t) = g [x(t), u(t), t]
17](https://image.slidesharecdn.com/aslides11-110918161403-phpapp02/85/A-slides-11-17-320.jpg)
![Systèmes analogiques linéaires
Linear continuous time systems
x(t) = f [x(t), u(t), t]
˙
Non linéaire
y(t) = g [x(t), u(t), t]
x(t) = A(t)x(t) + B(t)u(t)
˙
Linéaire
y(t) = C(t)x(t) + D(t)u(t)
x(t) = Ax(t) + Bu(t)
˙ Linéaire et
y(t) = Cx(t) + Du(t) stationnaire
19](https://image.slidesharecdn.com/aslides11-110918161403-phpapp02/85/A-slides-11-19-320.jpg)

![2.3: Méthode de Runge-Kutta
1
x (kh + h) ≈ x (kh) + [a(kh) + 2b (kh) + 2c (kh) + d (kh)]
6
y (kh) = g [x (kh) , u (kh) , kh]
a (kh) = hf [x (kh) , u (kh) , kh]
a(kh)
b (kh) = hf x (kh) + 2 , u kh + h , kh + h
2 2
b(kh)
c (kh) = hf x (kh) + 2 , u kh + 2 , kh + h
h
2
d (kh) = hf [x (kh) + c (kh) , u (kh + h) , kh + h]
21](https://image.slidesharecdn.com/aslides11-110918161403-phpapp02/85/A-slides-11-21-320.jpg)
![Systèmes discrets non linéaires
Nonlinear discrete time systems
x1 (k + 1) = f1 [x1 (k), . . . , xn (k), u1 (k), . . . , ur (k), k]
x (k + 1) = f [x (k), . . . , x (k), u (k), . . . , u (k), k] x1 (k + 1)
2 2 1 n 1 r x2 (k + 1)
.
. x(k + 1) = .
. .
.
x (k + 1) = f [x (k), . . . , x (k), u (k), . . . , u (k), k]
n n 1 n 1 r xn (k + 1)
y1 (k) = g1 [x1 (k), . . . , xn (k), u1 (k), . . . , ur (k), k] y1 (k)
y (k) = g [x (k), . . . , x (k), u (k), . . . , u (k), k] y (k)
2 2 1 n 1 r 2
. y(k) = .
.
. .
.
y (k) = g [x (k), . . . , x (k), u (k), . . . , u (k), k] yp (k)
p p 1 n 1 r
x1 (k) u1 (k) f1 [x(k), u(k), k]
x (k) u (k) f [x(k), u(k), k]
2 2 2
x(k) = . u(k) = . f [x(k), u(k), k] = .
.
. .
. .
.
xn (k) ur (k) fn [x(k), u(k), k]
22](https://image.slidesharecdn.com/aslides11-110918161403-phpapp02/85/A-slides-11-22-320.jpg)
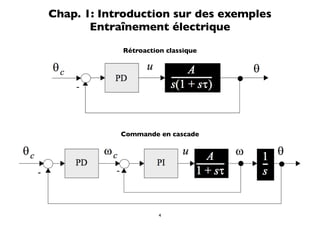
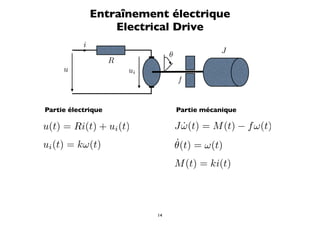
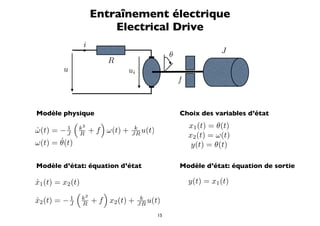
![Entraînement électrique
Electrical Drive
i
θ J
R
u ui
f
Modèle analogique
θ(s) A 1 b
G(s) = = τ =− A=−
U (s) s (1 + sτ ) a a
Modèle discret vu au travers de convertisseurs AD DA
α = −e−h/τ
G(s)
H(z) = 1 − z −1 Z L−1 b1 = A [h − τ (1 + α)]
s
b2 = A [τ (1 + α) + hα]
θ(z) b1 z −1 + b2 z −2 b1 z −1 + b2 z −2
H(z) = = =
U (z) (1 − z −1 ) (1 + αz −1 ) 1 + (α − 1) z −1 − αz −2
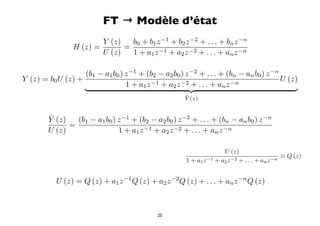
23](https://image.slidesharecdn.com/aslides11-110918161403-phpapp02/85/A-slides-11-23-320.jpg)
![Entraînement électrique
Electrical Drive
i
θ J
R
u ui
f
Modèle discret vu au travers de convertisseurs AD DA
θ(z) b1 z −1 + b2 z −2 b1 z −1 + b2 z −2
H(z) = = =
U (z) (1 − z −1 ) (1 + αz −1 ) 1 + (α − 1) z −1 − αz −2
α = −e−h/τ b1 = A [h − τ (1 + α)] b2 = A [τ (1 + α) + hα]
Modèle d’état discret artificiel correspondant
w1 (k + 1) − (α − 1) α w1 (k) 1
= + u(k)
w2 (k + 1) 1 0 w2 (k) 0
w1 (k)
y(k) = θ(k) = b1 b2 + [0] u(k)
w2 (k)
29](https://image.slidesharecdn.com/aslides11-110918161403-phpapp02/85/A-slides-11-29-320.jpg)
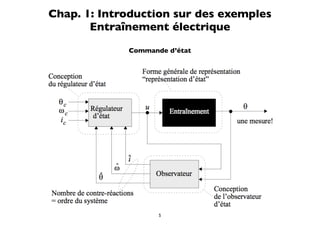
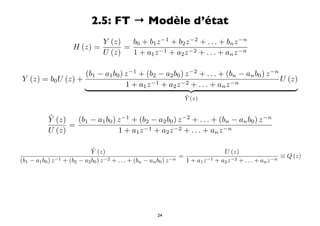
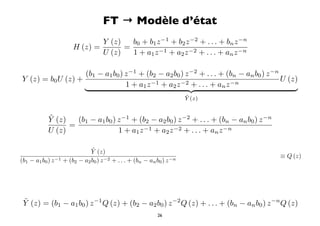
![Modèle d’état/State-space model
Analogique/Continuous Discret/Discrete
Non linéaire
Nonlinear
x (t) = f [x (t) , u (t) , t]
˙ x (k + 1) = f [x (k) , u (k) , k]
y (t) = g [x (t) , u (t) , t] y (k) = g [x (k) , u (k) , k]
Linéaire
x (t) = A (t) x (t) + B (t) u (t)
˙ x (k + 1) = Φ(k)x (k) + Γ(k)u (k)
Linear
y (t) = C (t) x (t) + D (t) u (t) y (k) = C(k)x (k) + D(k)u (k)
time-invariant
stationnaire
Linéaire et
Linear and
x (t)
˙ = Ax (t) + Bu (t) x (k + 1) = Φx (k) + Γu (k)
y (t) = Cx (t) + Du (t) y (k) = Cx (k) + Du (k)
30](https://image.slidesharecdn.com/aslides11-110918161403-phpapp02/85/A-slides-11-30-320.jpg)










































































