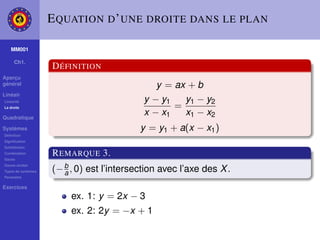
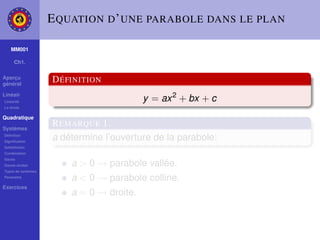
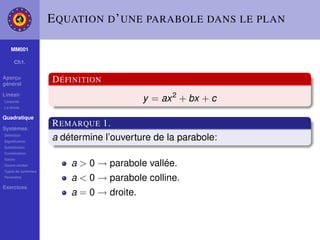
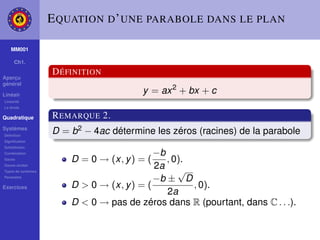
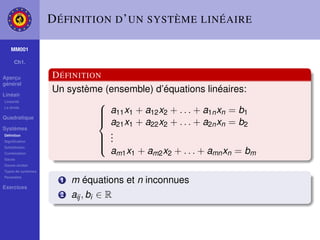
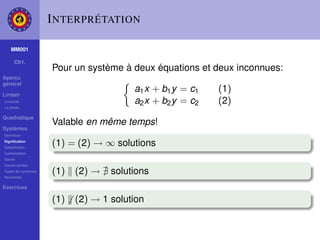
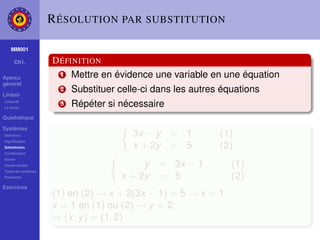
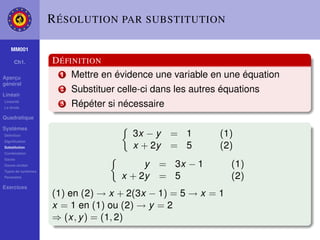
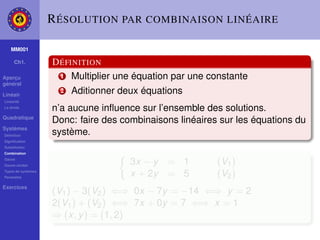
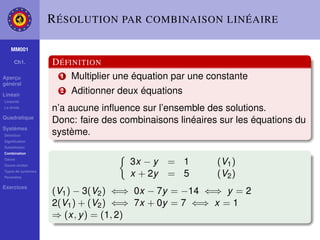
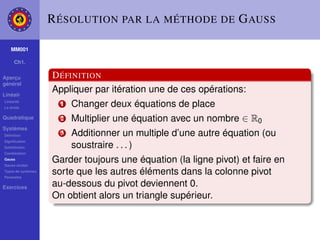
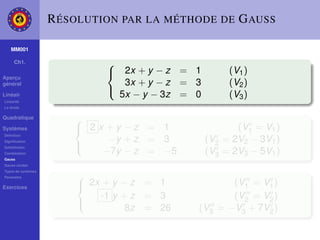
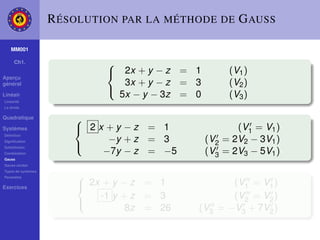
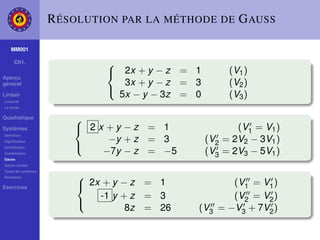
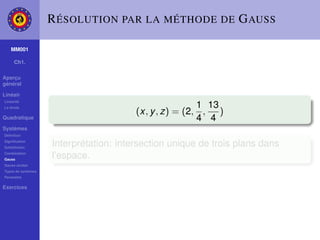
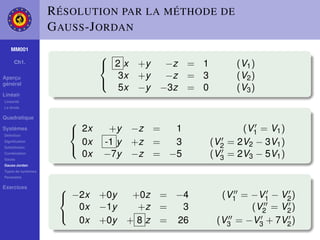
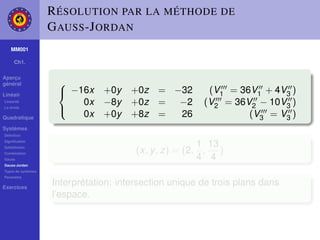
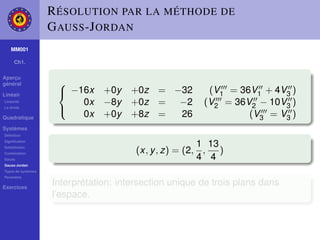
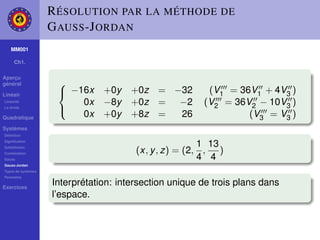
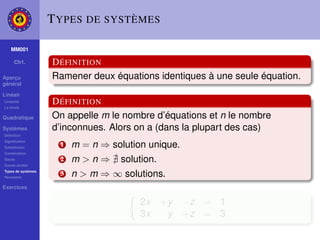
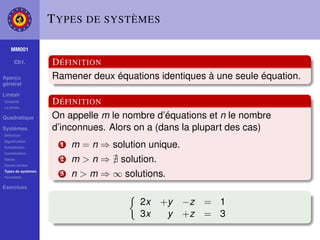
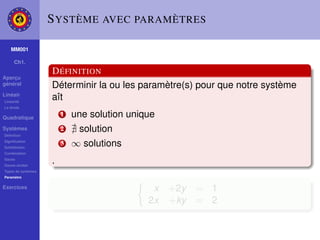
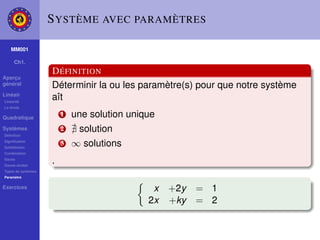
Le document est un curriculum vitae détaillé de Steve De Ridder, incluant son parcours éducatif et militaire, ainsi que ses qualifications en ingénierie informatique. Il aborde également les conceptsde systèmes d'équations linéaires et quadratiques, fournissant des définitions, des exemples et des méthodes de résolution comme la substitution et la méthode de Gauss. Ce document semble servir à la fois de présentation personnelle et de ressource pédagogique sur des sujets mathématiques précisés.