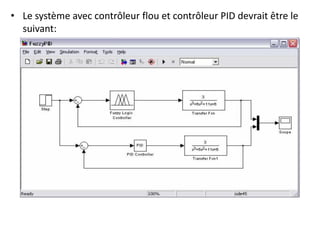
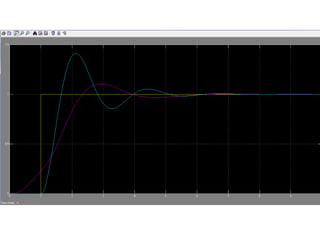
La logique floue, développée par Zadeh, permet de quantifier des notions imprécises comme la température à travers un degré d'appartenance variant entre 0 et 1. L'implication de Mamdani, utilisant une méthode d'inférence max-min, détermine des conclusions basées sur des règles définies par ces degrés d'appartenance. Des simulations montrent que les contrôleurs flous surpassent les contrôleurs PID classiques en termes de performance.

![• La logique floue repose sur la théorie des
ensembles flous développée par Zadeh [ZAD
65].
• A coté d'un formalisme mathématique fort
développé.](https://image.slidesharecdn.com/e0e7f91d-523b-46ea-b3ee-7bee6f7d19ba-160114110106/85/Logique-floue-Implication-de-Mamdani-2-320.jpg)
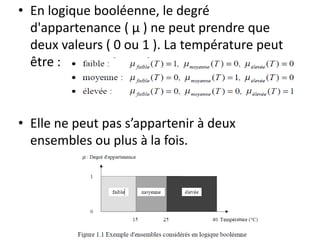
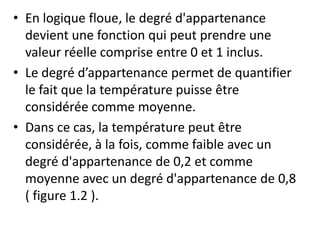
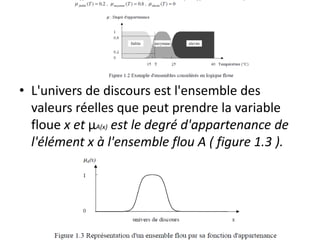
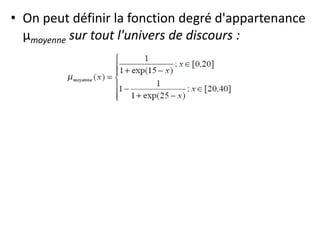
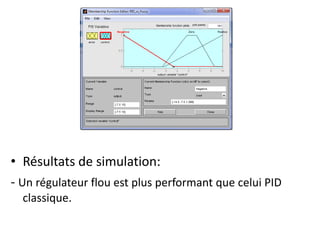
![• Dans notre exemple, la variable floue est la
température, l'univers de discours est l'ensemble
des réels de l'intervalle [0, 40]. On attribue à
cette variable trois sous-ensembles flous: faible,
moyenne et élevée. Chacun est caractérisé par
sa fonction degré d'appartenance:](https://image.slidesharecdn.com/e0e7f91d-523b-46ea-b3ee-7bee6f7d19ba-160114110106/85/Logique-floue-Implication-de-Mamdani-7-320.jpg)