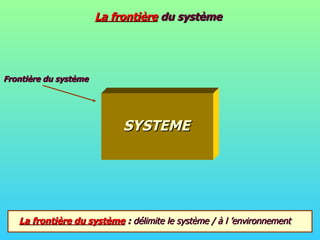
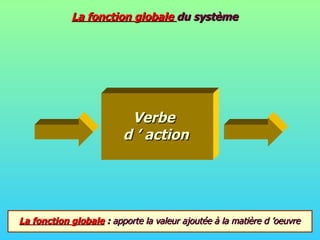
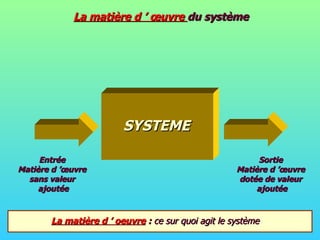
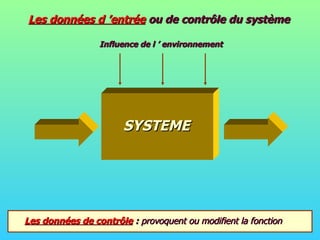
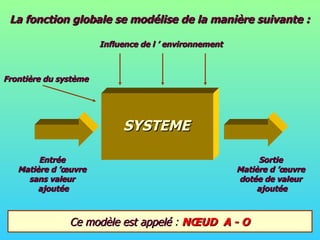
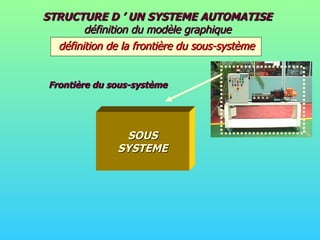
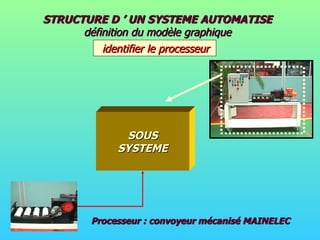
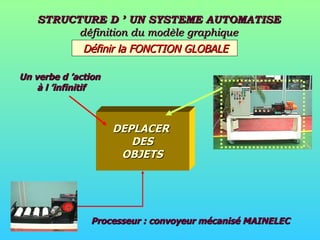
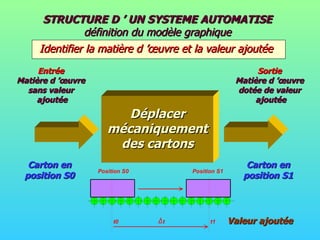
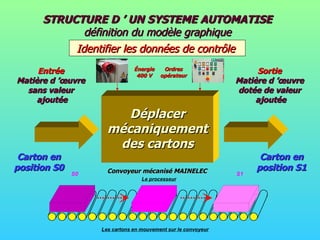
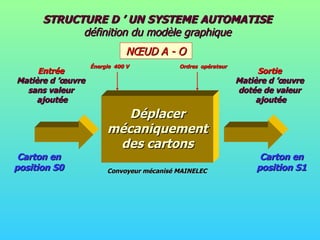
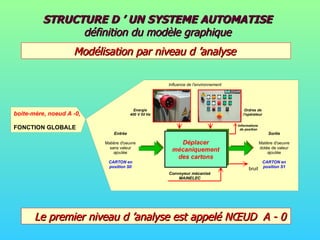
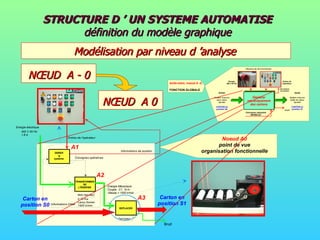
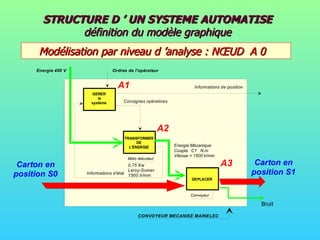
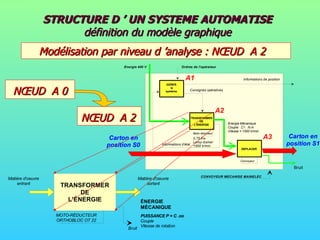
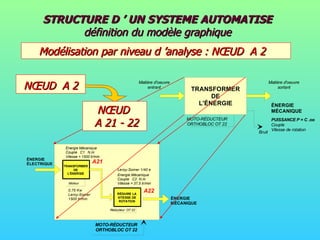
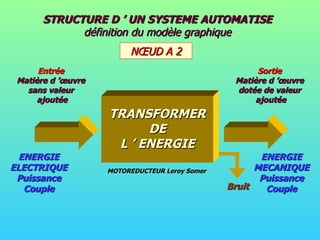
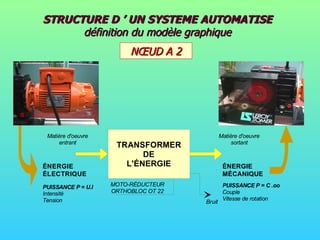
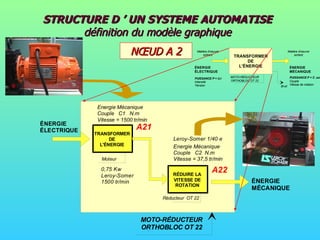
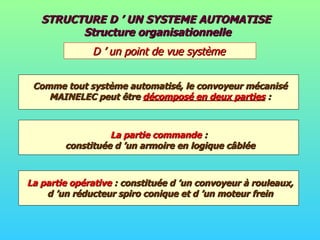
Le document traite de l'analyse systémique, en particulier de l'approche descendante, qui permet de définir et comprendre les systèmes et leurs sous-systèmes. Il décrit les concepts de fonctions globales, entrées, sorties et matières d'œuvre dans un contexte technique, ainsi que la modélisation graphique des systèmes automatisés. Enfin, il illustre la structure d'un système automatisé, à travers un exemple de convoyeur mécanisé.