Télécharger en tant que PDF, PPTX
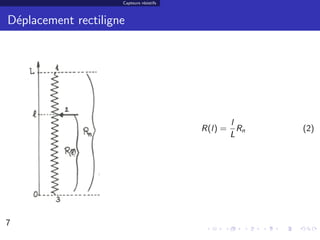
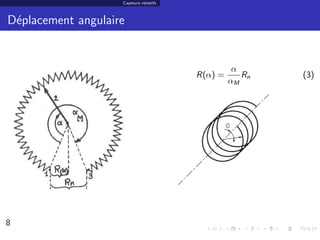
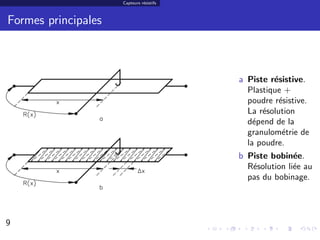
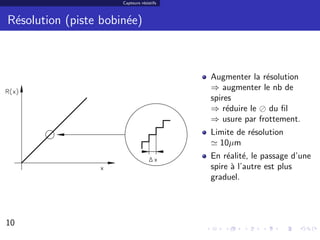


Le document traite des capteurs de position, en se concentrant sur trois types principaux : les capteurs résistifs, capacitifs et inductifs, ainsi que sur les capteurs de sortie binaire optique. Il fournit des détails techniques sur leur fonctionnement, leurs applications, et les avantages associés à chaque type. Divers exemples d'usage et considérations de conception sont également présentés.