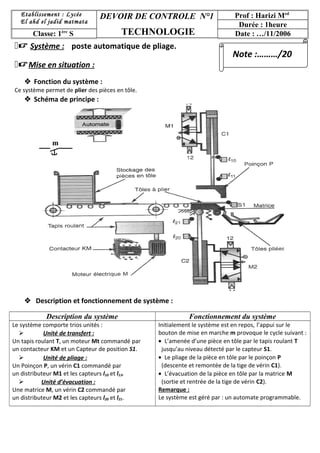
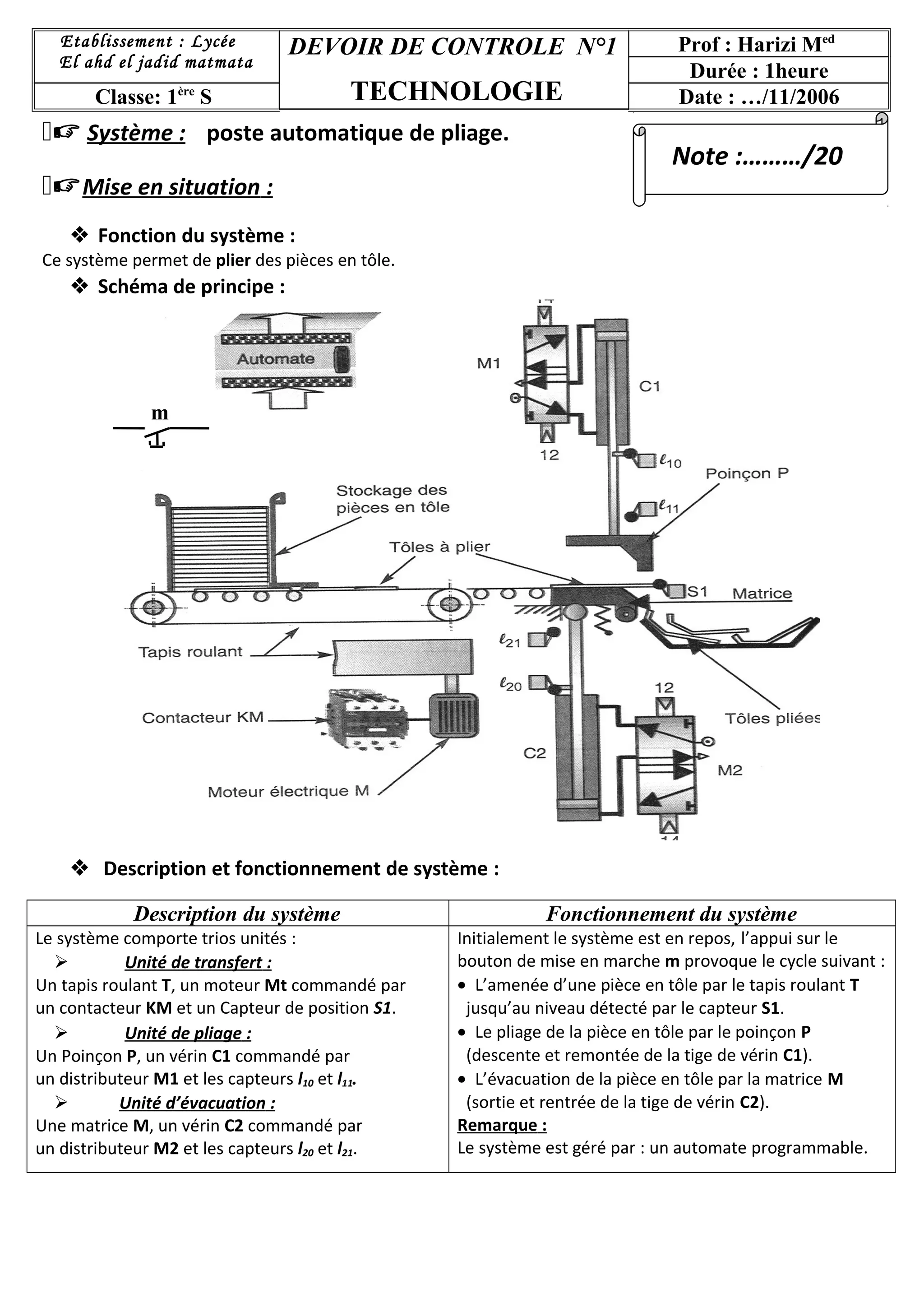
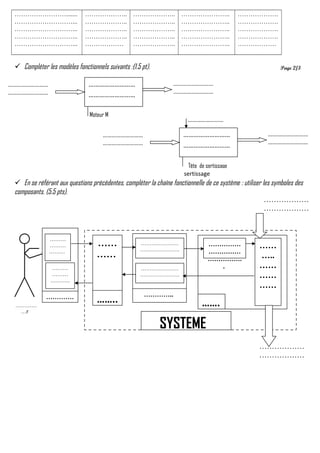
Le document décrit un système automatique de pliage conçu pour manipuler des pièces en tôle, avec une durée de contrôle d'une heure. Il détaille les unités fonctionnelles du système, y compris le transfert, le pliage et l'évacuation, ainsi que leur fonctionnement régulé par un automate programmable. Des tâches d'analyse fonctionnelle et de modélisation sont demandées aux étudiants pour mieux comprendre le système.