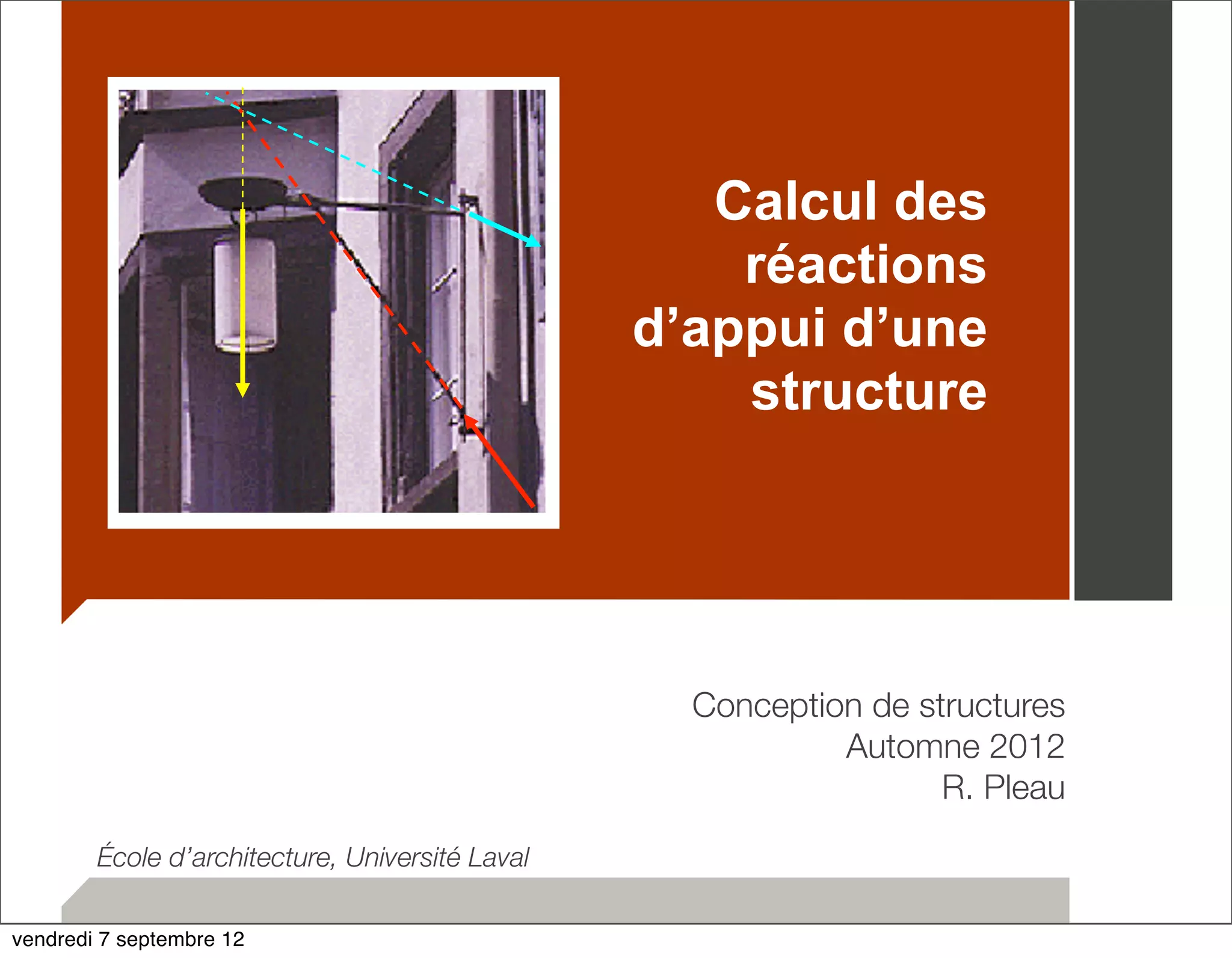
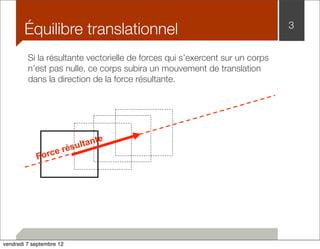
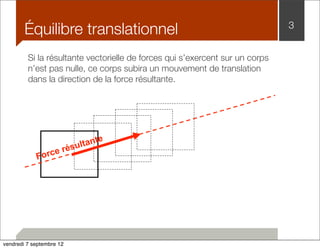
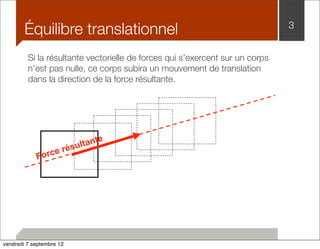
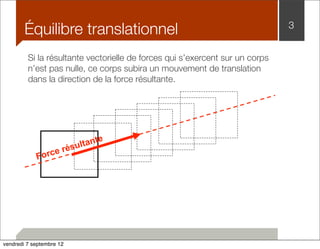
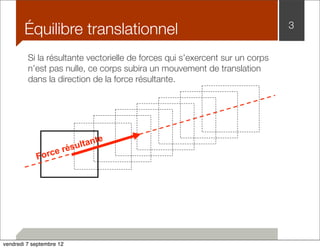
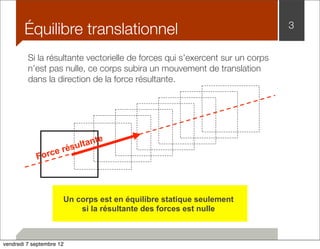
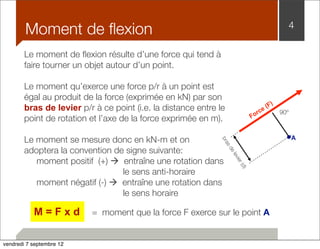
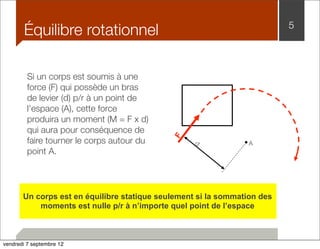
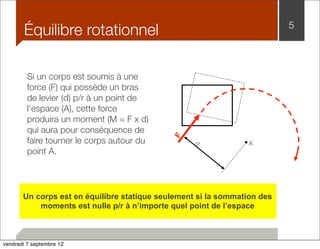
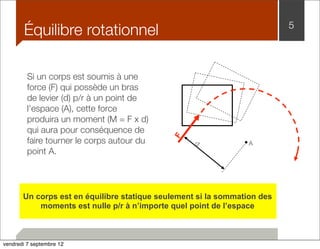
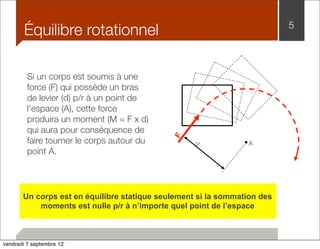
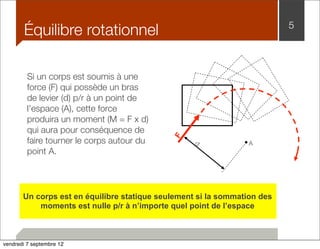
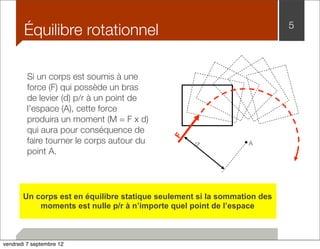
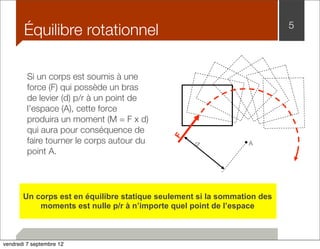
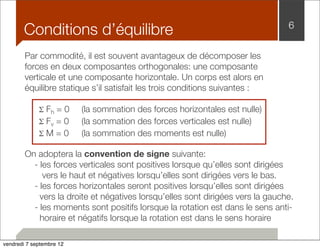
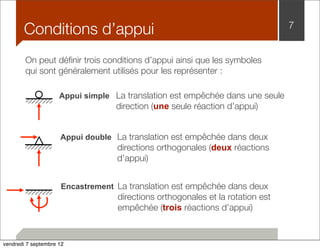
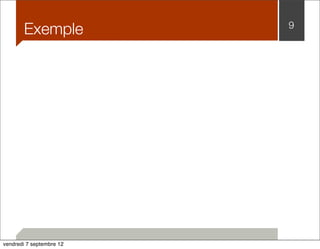
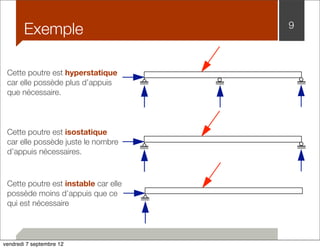
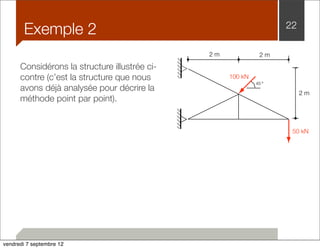
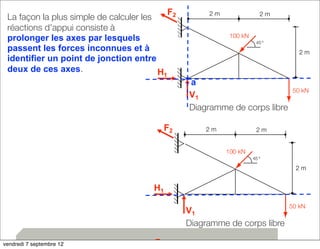
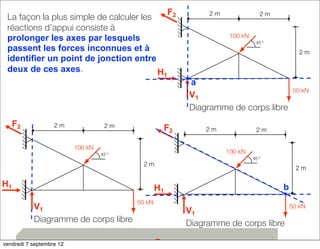
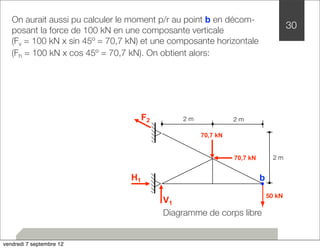
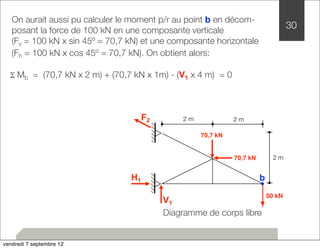
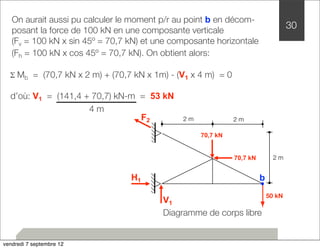
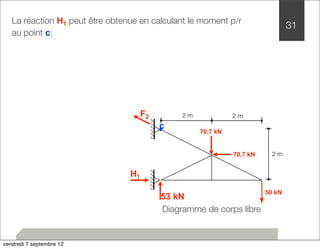
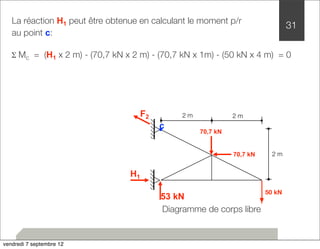
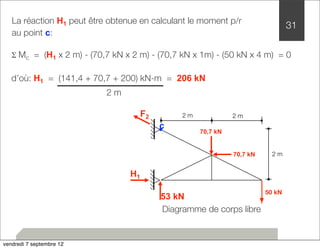
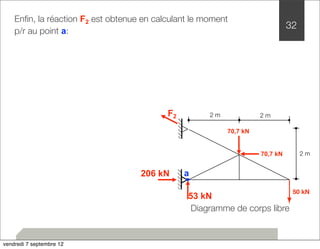
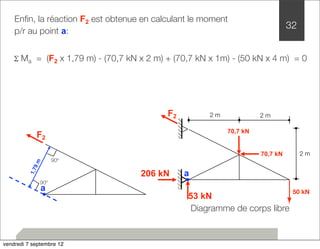
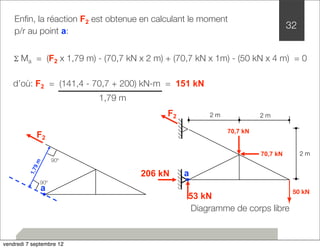
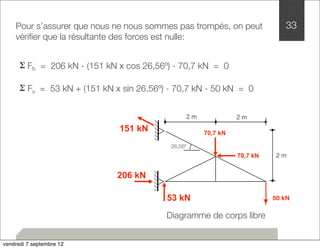
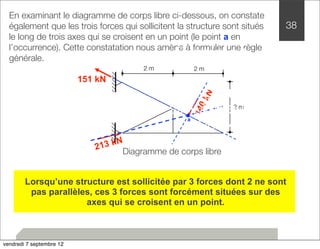
Le document traite des principes d'équilibre statique des structures, spécifiant les conditions nécessaires pour qu'un corps soit en équilibre, à la fois en translation et en rotation. Il introduit les différents types de structures selon leur nombre de réactions d'appui et fournit des exemples pratiques de calculs pour déterminer les réactions d'appui d'une poutre isostatique. En outre, il met en garde sur la validité des méthodes en fonction du type de structure et présente les concepts de force résultante équivalente.
![Exemple 1 12
10 kN 20 kN 30 kN
4 2 3 3 [m]
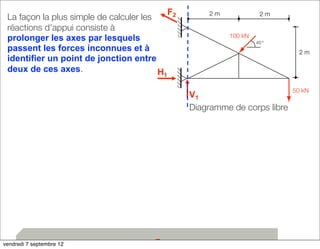
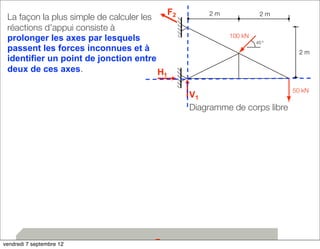
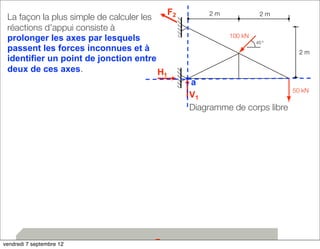
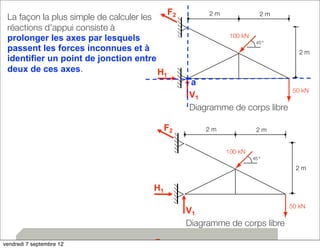
On veut calculer les réactions
d’appui de la poutre illustrée ci-contre.
vendredi 7 septembre 12](https://image.slidesharecdn.com/4-reactionsdappui-140828090736-phpapp02/85/4-reactions-d-appui-31-320.jpg)
![Exemple 1 (suite) 13
La première étape consiste à
dessiner le diagramme de corps
libre (DCL) et d’identifier les
réactions d’appui.
On remarque que l’on a trois
réactions d’appui et que la
structure est donc isostatique.
[m]
10 kN 20 kN 30 kN
V1
H
V2
4 2 3 3
diagramme de corps libre
vendredi 7 septembre 12](https://image.slidesharecdn.com/4-reactionsdappui-140828090736-phpapp02/85/4-reactions-d-appui-32-320.jpg)
![Puisque la sommation des
forces horizontales doit être
nulle (Σ Fh = 0) et que la
structure n’est soumise à
aucune force horizontale
externe, on en conclut
facilement que:
H = 0
14
[m]
10 kN 20 kN 30 kN
V1
H
V2
diagramme de corps libre
12
Exemple 1 (suite)
4 2 3 3
vendredi 7 septembre 12](https://image.slidesharecdn.com/4-reactionsdappui-140828090736-phpapp02/85/4-reactions-d-appui-33-320.jpg)
![Exemple 1 (suite)
On pourrait utiliser la seconde
condition d’équilibre (Σ Fv = 0) mais,
comme il y a deux forces verticales
inconnues (V1 et V2), il est alors
impossible de trouver directement
l’une de ces deux forces.
axe a
15
axe b
[m]
10 kN 20 kN 30 kN
4 2 3 3
V1 V2
diagramme de corps libre
12
On aura donc recours à la troisième condition d’équilibre qui veut que la
sommation des moments p/r à n’importe quel point soit nulle (Σ M = 0). Pour éviter
d’avoir deux forces inconnues (V1 et V2), nous choisirons un point qui est situé
dans l’axe de V1 ou de V2. Puisque le bras de levier de l’une de ces forces sera
alors nulle, il nous restera une seule inconnue.
On pourrait donc calculer les moments p/r à n’importe quel point situé sur l’axe a
ou sur l’axe b.
vendredi 7 septembre 12](https://image.slidesharecdn.com/4-reactionsdappui-140828090736-phpapp02/85/4-reactions-d-appui-34-320.jpg)
![On calcule le moment p/r au point a
et, puisque cette sommation doit être
nulle (Σ Ma = 0), on trouve que: a
Σ Ma = (V1 x 0) - (10 kN x 4 m) - (20 kN x 6 m) - (30 kN x 9 m) + (V2 x 12 m) = 0
En isolant V2 on trouve alors que:
V2 = (40 + 120 + 270) kN-m = 35,83 kN
12 m
16
[m]
10 kN 20 kN 30 kN
V1 V2
diagramme de corps libre
12
Exemple 1 (suite)
4 2 3 3
vendredi 7 septembre 12](https://image.slidesharecdn.com/4-reactionsdappui-140828090736-phpapp02/85/4-reactions-d-appui-35-320.jpg)
![Puisque la sommation des forces
verticales doit être nulle (Σ Fv = 0), on
trouve finalement que:
V1 - 10 kN - 20 kN - 30 kN + 35,83 kN = 0
En isolant V1, on trouve alors que:
V1 = (10 + 20 + 30 - 35,83 kN) = 24,17 kN
17
[m]
10 kN 20 kN 30 kN
V1 35,83 kN
diagramme de corps libre
12
Exemple 1 (suite)
4 2 3 3
vendredi 7 septembre 12](https://image.slidesharecdn.com/4-reactionsdappui-140828090736-phpapp02/85/4-reactions-d-appui-36-320.jpg)
![Pour s’assurer que nous ne nous
sommes pas trompés, on pourrait
vérifier que la sommation des
moments p/r au point b est bien
nulle:
Σ Mb = - (24,17 kN x 12 m) + (10 kN x 8 m) + (20 kN x 6 m)
+ (30 kN x 3 m) + (35,83 x 0 m)
= 0
18
b
[m]
10 kN 20 kN 30 kN
35,83 kN
Vérification
4 2 3 3
24,17 kN diagramme de corps libre
vendredi 7 septembre 12](https://image.slidesharecdn.com/4-reactionsdappui-140828090736-phpapp02/85/4-reactions-d-appui-37-320.jpg)
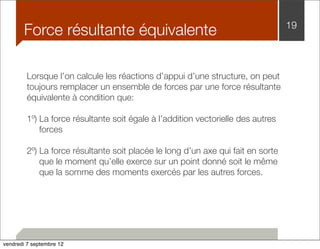
![Force résultante équivalente 20
Pour la poutre de l’exemple précé-dent,
calculons la résultante des
forces.
1º) La force résultante est obtenue
par l’addition vectorielle des 3
autres forces
10 kN
20 kN
30 kN
60 kN
Force résultante
[m]
10 kN 20 kN 30 kN
V1
4 2 3 3
V2
vendredi 7 septembre 12](https://image.slidesharecdn.com/4-reactionsdappui-140828090736-phpapp02/85/4-reactions-d-appui-39-320.jpg)
![Force résultante équivalente 21
2º) La force résultante doit produire le
même moment de rotation que
l’ensemble des 3 forces indivi-duelles
sur n’importe quel point de
la poutre. La position de l’axe par
lequel passe la force résultante est
donc obtenue en faisant la somme
des moments p/r à un point (le
point a dans notre exemple).
Σ Ma = - (10 kN x 4 m) - (20 kN x 6 m) - (30 kN x 9 m)
= - (60 kN x d)
En isolant d, on trouve que:
d = - (40 + 120 + 270) kN-m = 7,17 m
60 kN
a
V1
[m]
10 kN 20 kN 30 kN
4 2 3 3
V2
[m]
V1
4 2 3 3
a
d 60 kN
V2
vendredi 7 septembre 12](https://image.slidesharecdn.com/4-reactionsdappui-140828090736-phpapp02/85/4-reactions-d-appui-40-320.jpg)
![Force résultante équivalente 22
Calculons maintenant les 7,17 m 60 kN
réactions d’appui pour le
diagramme de
corps libre qui est illustré à la
figure
ci-contre. V2
Σ Ma = - (60 kN x 7,17 m) + (V2 x 12 m)
d’où: V2 = 60 kN x 7,17 m = 35,85 kN
12 m
Σ Fv = V1 - 60 kN + 35,85 kN = 0
d’où: V1 = (60 - 35,85 kN) = 24,15 kN
On constate bien que l’on
obtient les mêmes réactions
d’appui que précédemment
(si on néglige la petite différence
de 0,02 kN qui est simplement
causée par une petite erreur
d’arrondi sur la longueur des
bras de levier.
[m]
V1
4 2 3 3
a
vendredi 7 septembre 12](https://image.slidesharecdn.com/4-reactionsdappui-140828090736-phpapp02/85/4-reactions-d-appui-41-320.jpg)
![Exemple 41
On souhaite calculer les réactions d’appui pour la poutre illustrée
ci-dessous.
[m]
100 kN
rotule
4 4 4 6
vendredi 7 septembre 12](https://image.slidesharecdn.com/4-reactionsdappui-140828090736-phpapp02/85/4-reactions-d-appui-85-320.jpg)
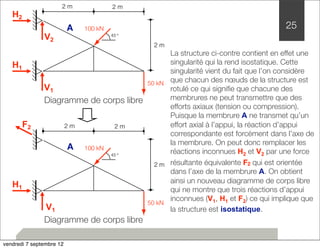
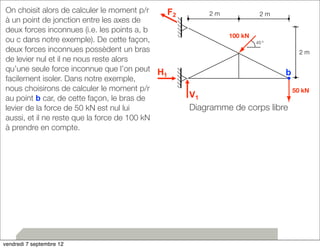
![Exemple (suite) 42
La première étape consiste à tracer le diagramme de corps libre
de la structure entière.
H rotule
diagramme de corps libre
[m]
100 kN
4 4 4 6
V1 V2 V3
On constate que nous avons 4 réactions d’appui (H, V1, V2 et V3)
mais seulement trois équations d’équilibre (Σ Fh = 0, Σ Fv = 0 et Σ M = 0)
ce qui suggère une structure hyperstatique.
Dans ces conditions il est mathématiquement impossible de calculer
les réactions d’appui.
On constate que nous avons 4 réactions d’appui
(H, V1, V2 et V3) mais seulement trois équations d’équilibre
vendredi 7 septembre 12](https://image.slidesharecdn.com/4-reactionsdappui-140828090736-phpapp02/85/4-reactions-d-appui-86-320.jpg)
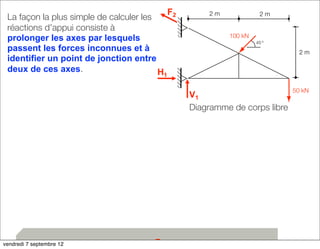
![Exemple (suite) 43
Pour obtenir une quatrième
conditions d’équilibre, on doit
tracer le diagramme de corps libre
sur une section tronquée de la
structure (à gauche ou à droite de
la rotule).
Sur le DCL d’une section tronquée
de la poutre, les forces A et B
représentent les efforts exercés
par la partie de poutre que nous
avons escamotée selon de principe
d’action-réaction.
A
diagramme de corps libre
[m]
4 6
V2 V3
a
A
B
diagramme de corps libre
[m]
100 kN
4 4
H
V1
a
B
A
Sur ces sections tronquées, on sait
que la sommation des moments à la
rotule doit être égal à 0 (Σ Ma = 0).
vendredi 7 septembre 12](https://image.slidesharecdn.com/4-reactionsdappui-140828090736-phpapp02/85/4-reactions-d-appui-87-320.jpg)
![Exemple (suite) 45
En considérant le DCL de la structure entière on trouve que:
H rotule
diagramme de corps libre
[m]
100 kN
4 4 4 6
V1 V2 V3
b
Σ Fh = 0 d’où H = 0 kN :
Σ Mb = - (100 kN x 4 m) + (V2 x 12 m) + (V3 x 18 m) = 0 d’où :
12 V2 + 18 V3 = 400 équation [1]
vendredi 7 septembre 12](https://image.slidesharecdn.com/4-reactionsdappui-140828090736-phpapp02/85/4-reactions-d-appui-89-320.jpg)
![Exemple (suite) 46
En considérant le DCL de la structure partielle à droite de la
rotule on trouve que:
diagramme de corps libre
Σ Ma = (V2 x 4 m) + (V3 x 10 m) = 0 d’où :
4 V2 + 10 V3 = 0 équation [2]
[m]
4 6
V2 V3
a
vendredi 7 septembre 12](https://image.slidesharecdn.com/4-reactionsdappui-140828090736-phpapp02/85/4-reactions-d-appui-90-320.jpg)
![Exemple (suite) 47
Nous avons maintenant un système de deux équations à deux
inconnues (V2 et V3) que nous pouvons résoudre.
12 V2 + 18 V3 = 400 équation [1]
4 V2 + 10 V3 = 0 équation [2]
En isolant V2 dans l’équation [2] on obtient :
V2 = 18 V3 = - 2,5 V3 équation [3]
En substituant l’équation [3] dans l’équation [1] on trouve que :
- 30 V3 + 18 V3 = 400 équation [4]
D’où V3 = 400 / -12 = - 33,33 kN
vendredi 7 septembre 12](https://image.slidesharecdn.com/4-reactionsdappui-140828090736-phpapp02/85/4-reactions-d-appui-91-320.jpg)
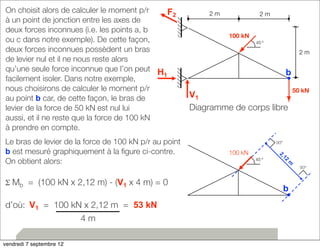
![Exemple (suite) 48
En substituant la valeur V3 dans l’équation [1] on trouve que :
12 V2 + 18 V3 = 400 équation [1]
12 V2 + (18 x -33,33) = 400 d’où V2 = (400 + 600) /12 = 83,33 kN
On obtient la dernière inconnue, V1, en faisant la sommation
des forces verticales :
Σ Fv = V1 + V2 + V3 - 100 kN = 0 d’où : V1 = 100 - V2 - V3
V1 = 100 - 83,33 - (-33,33) = 50 kN
vendredi 7 septembre 12](https://image.slidesharecdn.com/4-reactionsdappui-140828090736-phpapp02/85/4-reactions-d-appui-92-320.jpg)
![Exemple (suite) 49
Pour conclure, la figure ci-dessous illustre les réactions d’appui.
[m]
100 kN
rotule
4 4 4 6
50 kN 83,33 kN 33,33 kN
vendredi 7 septembre 12](https://image.slidesharecdn.com/4-reactionsdappui-140828090736-phpapp02/85/4-reactions-d-appui-93-320.jpg)
![Vérification 50
Pour s’assurer que nos calculs
sont exacts, on peut vérifier
A l’équilibre statique de la partie
tronquée à la gauche de la
[m]
rotule en faisant la sommation
des moments au point a.
diagramme de corps libre
100 kN
4 4
50 kN
a
B
Σ Ma = - (50 kN x 8 m) + (100 kN x 4 m) = 0
vendredi 7 septembre 12](https://image.slidesharecdn.com/4-reactionsdappui-140828090736-phpapp02/85/4-reactions-d-appui-94-320.jpg)


















![[Soutenance du PFE] Étude du flambement des poteaux selon l'EC2](https://cdn.slidesharecdn.com/ss_thumbnails/soutenancedupfe-141030050449-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)





































